Usar a instrução Derivativa integral proporcional
Esta seção fornece detalhes específicos e exemplos para usar a instrução Proporcional Integral Derivativo.
Exemplo: Como criar um circuito de feedback para o valor manipulado
Adicionar um circuito de feedback para o valor manipulado evita a ultrapassagem excessiva fornecendo um valor mínimo e máximo para o MV.
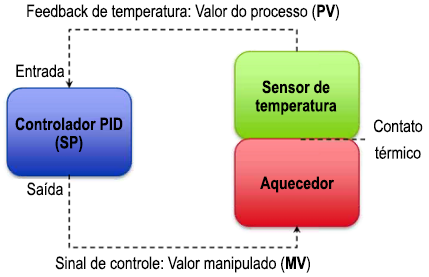
Exemplo de circuito do feedback de temperatura
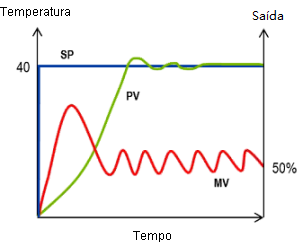
No início do processo de controle de temperatura, a diferença entre o valor do processo (PV) e o valor de ponto de ajuste (SP) é grande, conforme mostrado no gráfico a seguir. Neste exemplo de um circuito de feedback de temperatura, o PV começa a 0 graus Celsius e move-se para o valor de SP de 40 graus Celsius. Observe também que a flutuação entre o valor manipulado (MV) alto e baixo diminui e estabiliza com o tempo. O comportamento do MV depende dos valores usados em cada um dos parâmetros P, I e D.
Exemplo de circuito do feedback de temperatura
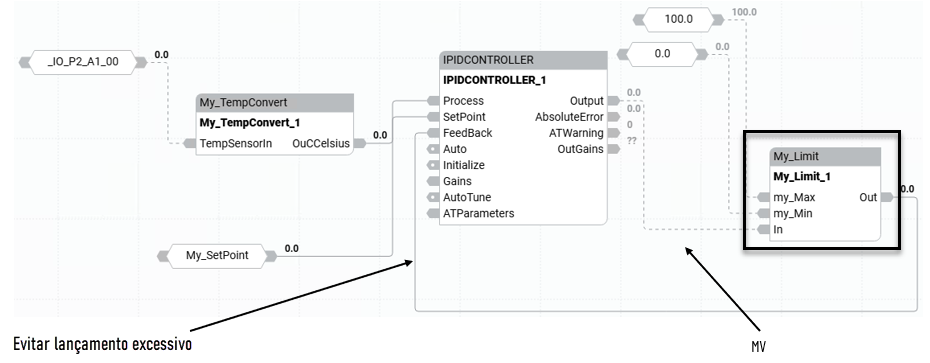
IPIDController com um circuito de feedback
O seguinte diagrama de blocos da função inclui um circuito de feedback para o valor manipulado que evita a ultrapassagem excessiva fornecendo um valor mínimo e máximo para o MV.
IPIDController com um circuito de feedback
Exemplo: Como implementar a regulagem automática em um bloco da função IPIDController
Use o parâmetro AutoTune do bloco da função IPIDController para implementar a regulagem automática no programa de controle.
Recomendações e requisitos de regulagem automática
A seguir está um resumo dos requisitos e das recomendações para implementar a regulagem automática com sucesso:
- A regulagem automática fazer com que a saída do circuito de controle oscile, o que significa que o IPIDController deve ser chamado com frequência suficiente para ter uma amostra adequada da oscilação.
- O bloco de instrução do IPIDController deve ser executado a um intervalo de tempo relativamente constante.
- Configure o tempo de varredura do programa para ter a metade do período de oscilação.
- Considere usar o bloco da instrução Interrupção de Texto Estruturado (STI) para controlar o bloco da instrução do IPIDController.
Exemplo: Como adicionar um UDFB para um programa PID
Adicione UDFBs fora do programa principal para realizar funções especializadas, como a conversão de unidades ou a transferência de valores.
Transfira o valor de ganho da regulagem automática
Transfira o valor de ganho da regulagem automática
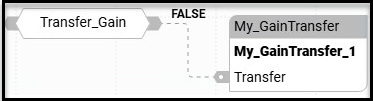
Esse UDFB transfere o valor do ganho da regulagem automática para My_GainTransfer. Assim, ele pode ser usado pelo controlador.
Converta um valor manipulado para uma saída digital
Converta um valor manipulado para uma saída digital
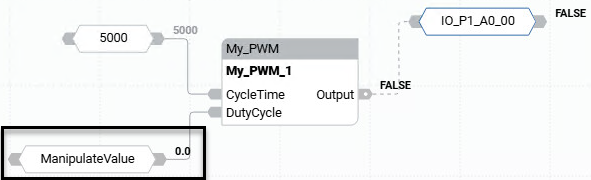
A instrução UDFB converte um valor manipulado (manipulated value, MV) para uma saída digital (digital output, DO). Assim, ele pode ser usado para controlar uma entrada digital (digital input, DI).
Converta um valor manipulado para uma saída analógica
Converta um valor manipulado para uma saída analógica
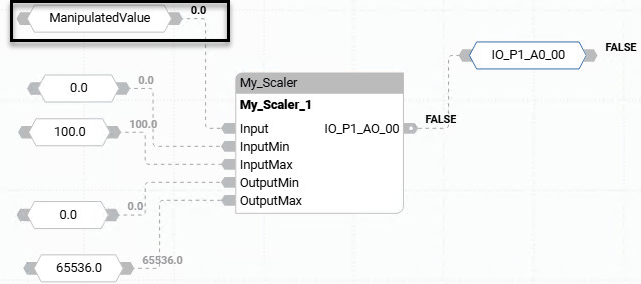
A instrução UDFB converta um valor manipulado (manipulated value, MV) para uma saída analógica (analog output, AO). Assim, ele pode ser usado para controlar uma entrada analógica (analog input, AI).
Dê sua opinião