Exemplo: IPIDController com regulagem automática
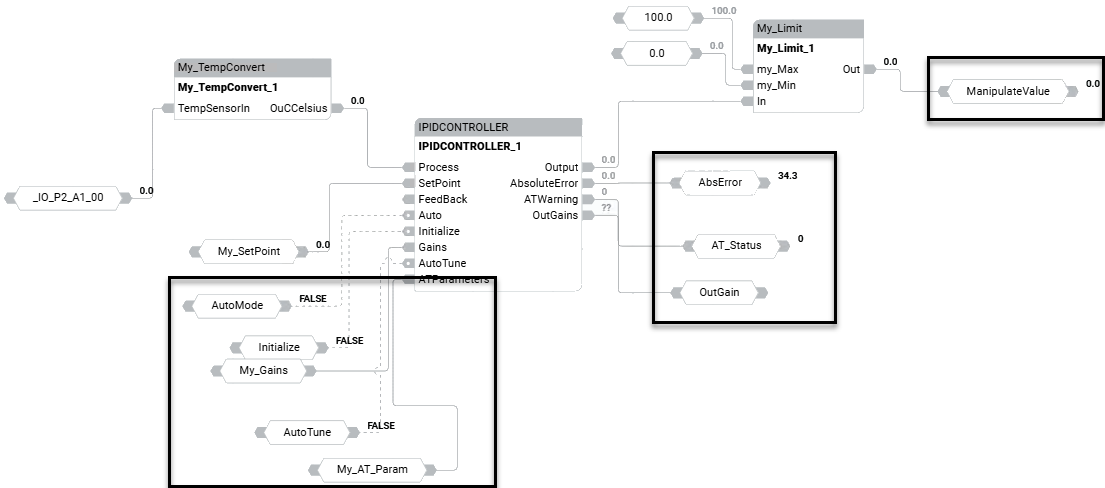
O seguinte programa de exemplo mostra as variáveis usadas para configurar os parâmetros para a regulagem automática.
IPIDController com regulagem automática
Parâmetros de regulagem automática
A seguinte tabela descreve as variáveis usadas com cada parâmetro no exemplo para configurar a regulagem automática.
Parâmetros da Input | ||
|---|---|---|
Variável | Parâmetro | Descrição |
AutoMode | Auto | O modo de operação do controlador PID:
|
Initialize | Initialize | Inicializa a sequência de regulagem automática. Uma mudança no valor de TRUE para FALSE ou FALSE para TRUE faz com que o controlador elimine qualquer ganho proporcional durante o ciclo. |
My_Gains | Gains | Estabelece o PID de Ganhos para o IPIDController. |
My_Gains.DirectActing | DirectActing | Define o tipo de ação para a saída.
|
My_Gains.ProportionalGain | ProportionalGain | Ganho proporcional para PID (>= 0.0001). |
My_Gains.TimeIntegral | TimeIntegral | Valor integral de tempo para PID (>= 0.0001). A tendência de oscilação aumenta com uma diminuição no ti. |
My_Gains.TimeDerivative | TimeDerivative | Valor derivativo de tempo para PID (> 0.0). O amortecimento aumenta com um aumento no tempo derivativo, mas diminui se o valor do tempo derivativo for muito grande. |
My_Gains.DerivativeGain | Ganho derivativo para PID (> 0.0). | |
AutoTune | Quando definido para TRUE e Auto e Inicializar são FALSE, a sequência de regulagem automática é iniciada. | |
ATParameters | ||
Load |
| |
Deviation |
| |
Step | O processo de regulagem automática considera como o valor do processo reage as mudanças no valor da etapa e deriva os parâmetros de Ganho. | |
ATDynaSet |
| |
ATReset |
| |
Parâmetros de saída | ||
AbsoluteError | Erro absoluto (Processo – Ponto de ajuste) do controlador. | |
ATWarning | Aviso para a sequência de regulagem automática. Os valores possíveis são:
| |
OutGains | Ganhos calculados após as sequências de regulagem automática. | |
Dê sua opinião