Utilizzo dell'istruzione proporzionale integrale derivativa
Questa sezione fornisce dettagli ed esempi specifici per l'utilizzo dell'istruzione proporzionale-integrale-derivativa (PID).
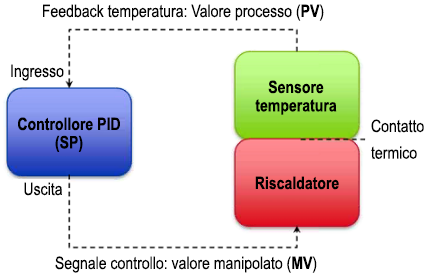
Esempio: come creare un ciclo di feedback per il valore manipolato
L'aggiunta di un ciclo di feedback per il valore manipolato previene la sovraelongazione eccessiva fornendo un valore minimo e massimo per MV.
Esempio ciclo di feedback sulla temperatura
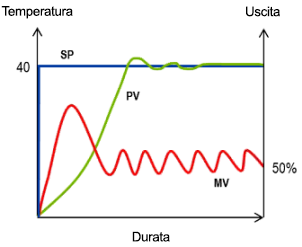
All'inizio del processo di controllo della temperatura la differenza tra il valore di processo (PV) e il valore setpoint (SP) è ampia, come mostrato nel seguente grafico. In questo esempio di ciclo di feedback sulla temperatura, PV inizia con 0 gradi Celsius e si sposta verso il valore SP di 40 gradi Celsius. Tenere anche presente che la fluttuazione tra il valore alto e basso manipolato (MV) scende e si stabilizza nel tempo. Il comportamento di MV dipende dai valori usati in ciascuno dei parametri P, I e D.
Esempio ciclo di feedback sulla temperatura
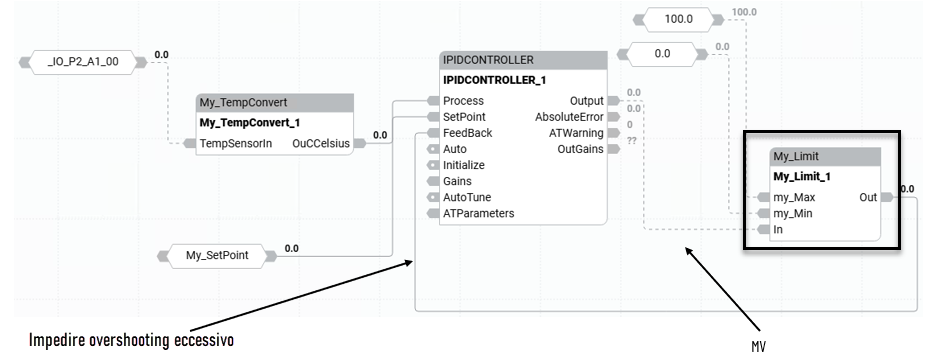
IPIDController con ciclo di feedback
Il seguente diagramma a blocchi funzionali include un ciclo di feedback per il valore manipolato che previene la sovraelongazione eccessiva fornendo un valore minimo e massimo per MV.
IPIDController con ciclo di feedback
Esempio: come implementare l'auto tuning in un blocco funzione IPIDController
Utilizzare il parametro AutoTune del blocco funzione IPIDController per implementare l'auto tuning nel programma di controllo.
Requisiti e raccomandazioni per l'auto tuning
Di seguito è riportato un riepilogo dei requisiti e delle raccomandazioni per la corretta implementazione dell'auto tuning:
- L'auto tuning deve causare l'oscillazione dell'uscita del ciclo di controllo, vale a dire che l'IPIDController deve essere richiamato con una certa frequenza per una campionatura adeguata dell'oscillazione.
- Il blocco funzione IPIDController deve essere eseguito con un intervallo relativamente costante.
- Configurare il tempo di scansione del programma alla metà dell'intervallo di oscillazione.
- Considerare l'utilizzo di un blocco di istruzioni Interruzione testo strutturato (STI) per controllare il blocco di istruzioni IPIDController.
Esempio: come aggiungere un UDFB a un programma PID
Aggiungere UDFB esternamente al programma principale per eseguire funzioni specializzate, come conversione di unità o trasferimento di valori.
Trasferimento del valore di guadagno con auto tuning
Trasferimento del valore di guadagno con auto tuning
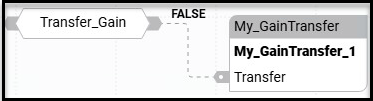
Questo UDFB trasferisce il valore del guadagno di Autotune a My_GainTransfer. In modo che possa essere utilizzato dal controllore.
Conversione di un valore manipolato in un'uscita digitale
Conversione di un valore manipolato in un'uscita digitale
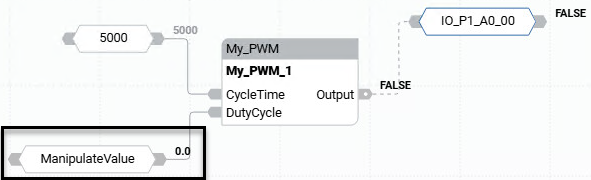
Questo UDFB converte un valore manipolato (MV) in un'uscita digitale (DO). Quindi può essere usato per controllare un ingresso digitale n(DI).
Conversione di un valore manipolato in un'uscita analogica
Conversione di un valore manipolato in un'uscita analogica
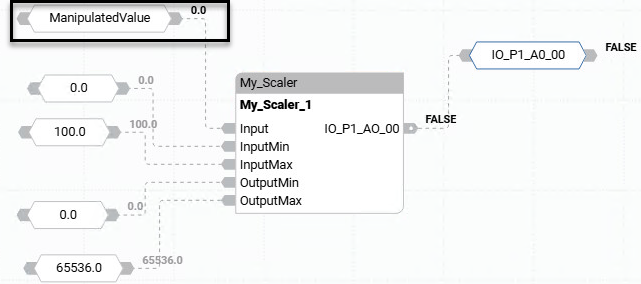
Questo UDFB converte un valore manipolato (MV) in un'uscita analogica (AO). Quindi può essere utilizzato per controllare un ingresso analogico (AI).
Fornire un feedback