Esempio: IPIDController con auto tuning
Nel programma dell'esempio seguente sono illustrate le variabili impiegate per configurare i parametri di auto tuning.
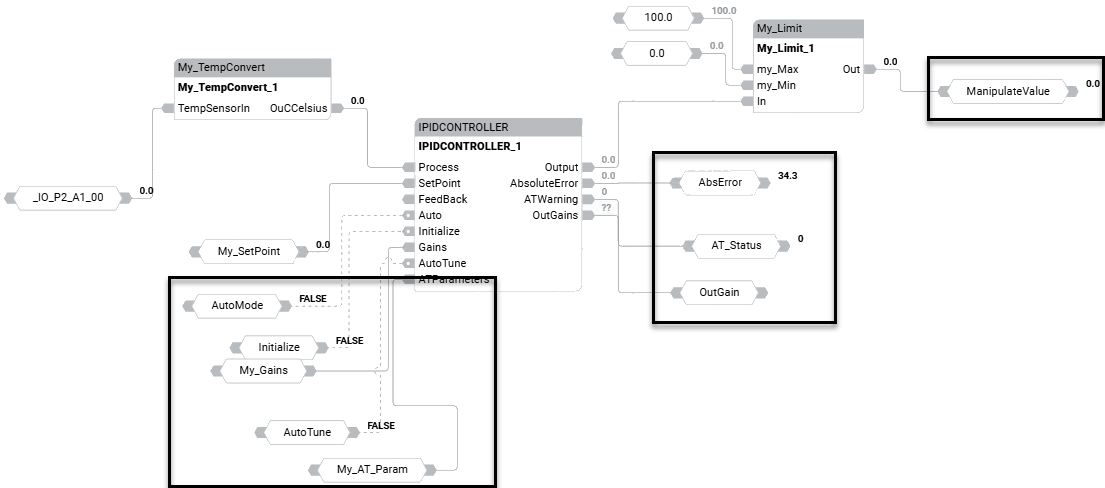
IPIDController con auto tuning
Parametri di auto tuning
Nella tabella seguente sono descritte le variabili utilizzate con ciascun parametro dell'esempio per configurare l'auto tuning.
Parametri di ingresso | ||
|---|---|---|
Variabile | Parametro | Descrizione |
AutoMode | Auto | La modalità operativa del controllore PID:
|
Initialize | Initialize | Inizializza la sequenza AutoTune. In caso di modifica del valore da TRUE a FALSE o da FALSE a TRUE, il controllore elimina qualsiasi guadagno proporzionale durante il ciclo. |
My_Gains | Gains | Stabilisce i guadagni PID per IPIDController. |
My_Gains.DirectActing | DirectActing | Definisce il tipo di azionamento dell'uscita.
|
My_Gains.ProportionalGain | ProportionalGain | Guadagno proporzionale per PID (>= 0,0001). |
My_Gains.TimeIntegral | TimeIntegral | Valore integrale di tempo per PID (>= 0,0001). La tendenza all'oscillazione aumenta con la diminuzione dell'integrale del tempo. |
My_Gains.TimeDerivative | TimeDerivative | Valore derivativo di tempo per PID (> 0,0). Lo smorzamento aumenta all'aumentare della derivata del tempo, ma si riduce se il valore della derivata del tempo è eccessivo. |
My_Gains.DerivativeGain | Guadagno derivativo per PID (> 0,0). | |
AutoTune | Se impostato su TRUE e Auto e Initialize sono su FALSE, la sequenza AutoTune è stata avviata. | |
ATParameters | ||
Load |
| |
Deviation |
| |
Step | Il processo di auto tuning deriva i parametri Gain in base a come il valore di processo cambia in seguito alla modifica del valore del passo. | |
ATDynaSet |
| |
ATReset |
| |
Parametri di uscita | ||
AbsoluteError | Errore assoluto (Process – SetPoint) dal controllore. | |
ATWarning | Avviso per la sequenza Auto Tune. I possibili valori sono:
| |
OutGains | Guadagni calcolati dopo le sequenze AutoTune. | |
Fornire un feedback