Configurazione dell'auto tuning
Seguire questa procedura generale per l'implementazione dell'auto tuning con la funzione IPIDCONTROLLER.
Passo | Descrizione | Esempio |
|---|---|---|
1 | Reimpostare il SetPoint su zero. |  |
2 | Impostare la modalità automatica su False. |  |
3 | Impostare i parametri Gains. | 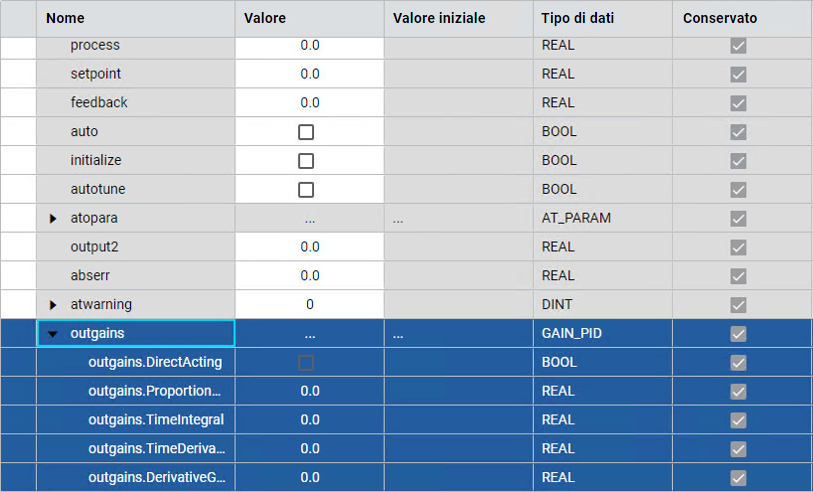 |
4 | Impostare i parametri AutoTune. | 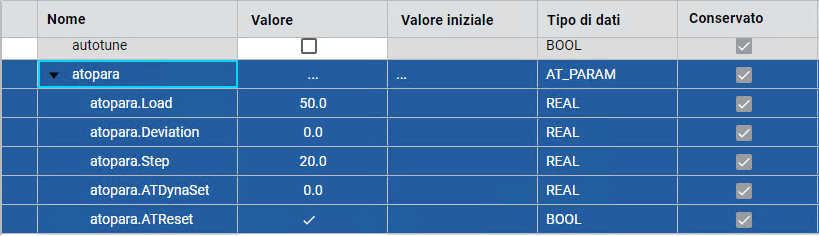 |
5 | Impostare i parametri Initialize e Auto-Tune su True. |  |
6 | Notare che l'uscita viene impostata sul valore di carico quando si imposta il parametro Auto-Tune su True. | 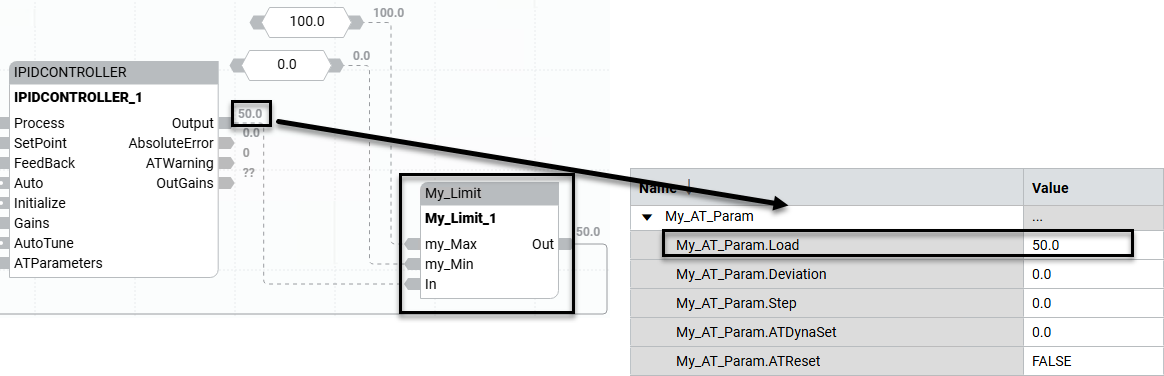 |
7 | Osservare l'incremento rapido del valore di processo, finché non si avvicina al punto di saturazione. |  |
8 | Osservare la stabilizzazione del valore di processo e la sua fluttuazione. |   |
9 | Impostare la deviazione. | 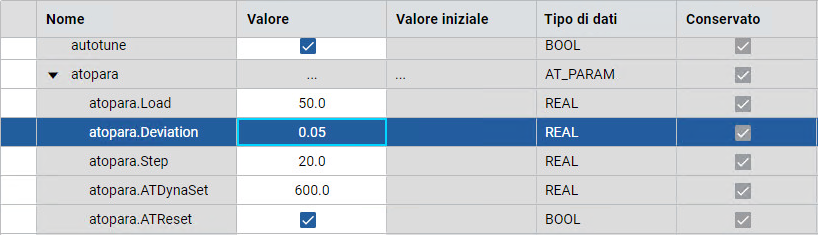 |
10 | Impostare Initialize su False. |  |
11 | Il controllore avvia l'auto tuning. Attendere l'impostazione di ATWarning su 2. | 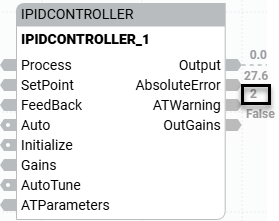 |
12 | Impostare AutoTune su False. |  |
13 | Osservare i valori presenti in OutGains dopo l'auto tuning. | 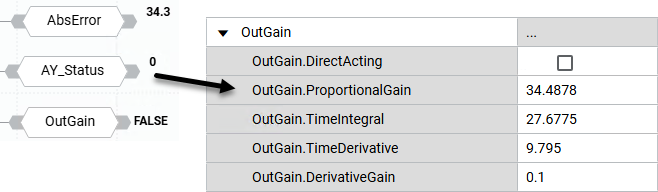 |
14 | Trasferire il parametro da OutGain a My_Gains. | 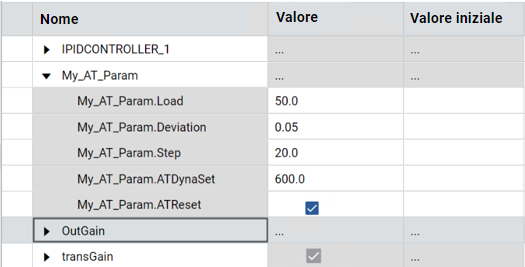 |
15 | Osservare se il controllore è aggiornato con il parametro del guadagno ottenuto dopo l'auto tuning. | 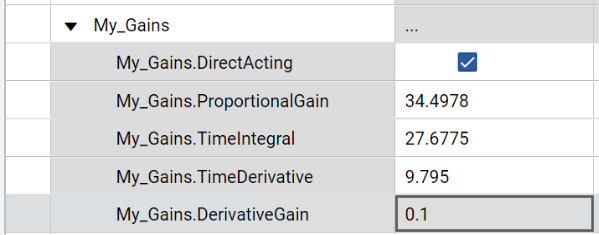 |
Fornire un feedback