Usar la instrucción proporcional-integral-derivativa
En esta sección se proporcionan ejemplos y detalles específicos sobre el uso de la instrucción derivativa integral proporcional.
Ejemplo: Cómo crear un bucle de retorno para el valor manipulado
La adición de un bucle de retorno para el valor manipulado evita que se excedan los límites al proporcionar un valor mínimo y uno máximo para el MV.
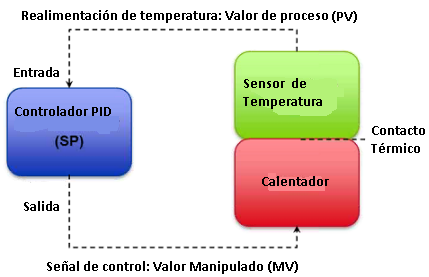
Ejemplo de bucle de retorno de temperatura
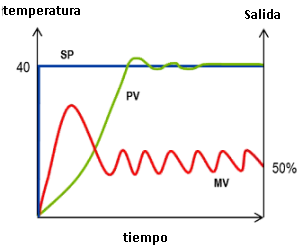
Al comienzo del proceso de control de temperatura, la diferencia entre el valor de proceso (PV) y el valor de punto de ajuste (SP) es amplia, como se muestra en el siguiente gráfico. En este ejemplo de un bucle de retorno de temperatura, el PV comienza en 0 grados Celsius y se mueve hacia el valor de SP de 40 grados Celsius. Tenga en cuenta también que la fluctuación entre los valores manipulados (MV) alto y bajo disminuye y se estabiliza con el transcurso del tiempo. El comportamiento del MV depende de los valores utilizados en cada uno de los parámetros P, I y D.
Ejemplo de bucle de retorno de temperatura
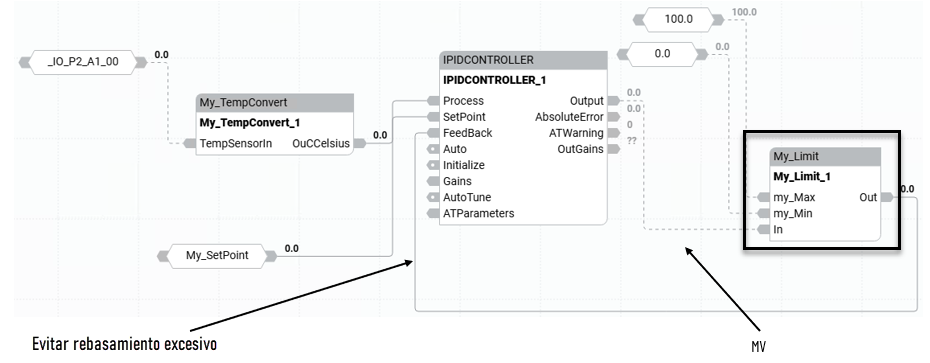
IPIDController con un bucle de retorno
El siguiente diagrama de bloque de funciones incluye un bucle de retorno para el valor manipulado que evita que se excedan los límites al proporcionar un valor mínimo y uno máximo para el MV.
IPIDController con un bucle de retorno
Ejemplo: Cómo implementar el ajuste automático en un bloque de funciones IPIDController
Utilice el parámetro AjusteAuto del bloque de funciones IPIDController para implementar el ajuste automático en el programa de control.
Recomendaciones y requisitos de ajuste automático
El siguiente es un resumen de los requisitos y las recomendaciones para implementar un ajuste automático correcto:
- El ajuste automático debe hacer que la salida del bucle de control oscile, lo que significa que se debe llamar a IPIDController con la frecuencia suficiente que permita crear una muestra de la oscilación adecuadamente.
- El bloque de instrucciones IPIDController se debe ejecutar a un intervalo de tiempo relativamente constante.
- Configure el tiempo de exploración del programa en la mitad del periodo de oscilación.
- Considere utilizar un bloque de instrucciones de interrupción de texto estructurado (STI) para controlar el bloque de instrucciones IPIDController.
Ejemplo: Cómo agregar un UDFB a un programa PID
Agregue UDFB, aunque sin incluirlo en el programa principal, para llevar a cabo funciones especiales, como convertir unidades o transferir valores.
Transferir el valor de ganancia de ajuste automático
Transferir el valor de ganancia de ajuste automático
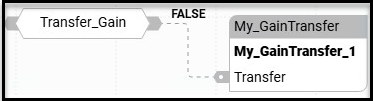
Este bloque de funciones definidas por el usuario (UDFB) transfiere el valor de ganancia de ajuste automático a My_GainTransfer. Para que pueda ser utilizado por el controlador.
Convertir un valor manipulado en una salida digital
Convertir un valor manipulado en una salida digital
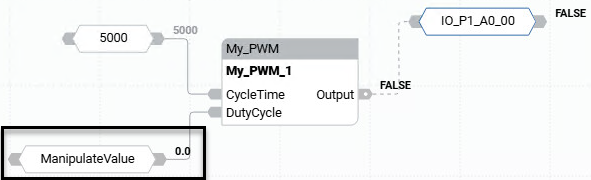
Este bloque de funciones definidas por el usuario (UDFB) convierte un valor manipulado (MV) en una salida digital (DO). Para que pueda ser utilizado para controlar una entrada digital n(DI).
Convertir un valor manipulado en una salida analógica
Convertir un valor manipulado en una salida analógica
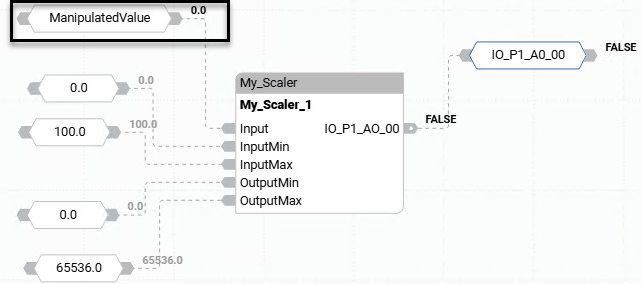
Este bloque de funciones definidas por el usuario (UDFB) convierte un valor manipulado (MV) en una salida analógica (AO). Por lo tanto, se puede utilizar para controlar una entrada analógica (AI).
Entregue su opinión