Ejemplo: IPIDController con ajuste automático
En el siguiente programa de ejemplo se muestran las variables utilizadas para configurar los parámetros de ajuste automático.
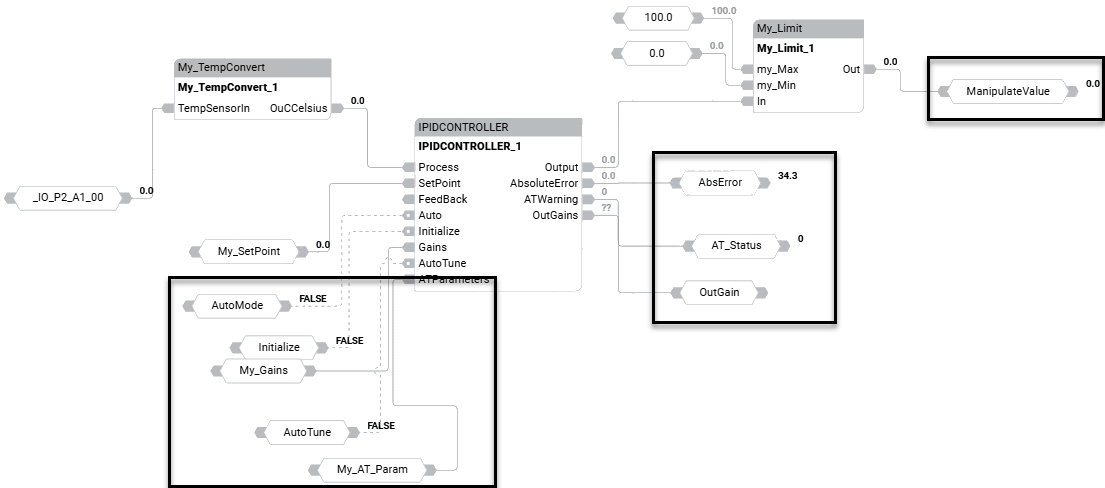
IPIDController con ajuste automático
Parámetros de ajuste automático
En la siguiente tabla se describen las variables que se utilizan con cada parámetro del ejemplo para configurar el ajuste automático.
Parámetros de entrada | ||
|---|---|---|
Variable | Parámetro | Descripción |
AutoMode | Auto | El modo de funcionamiento del controlador PID:
|
Initialize | Initialize | Inicializa la secuencia de ajuste automático. Un cambio en el valor de Cierto a Falso o de Falso a Cierto hace que el controlador elimine cualquier ganancia proporcional durante el ciclo. |
My_Gains | Gains | Establece las ganancias de PID para IPIDController. |
My_Gains.DirectActing | DirectActing | Define el tipo de accionamiento de la salida.
|
My_Gains.ProportionalGain | ProportionalGain | Ganancia proporcional para PID (>= 0,0001). |
My_Gains.TimeIntegral | TimeIntegral | Valor integral de tiempo de PID (>= 0,0001). La tendencia de oscilación aumenta con una disminución de ti. |
My_Gains.TimeDerivative | TimeDerivative | Valor derivativo de tiempo de PID (> 0,0). La amortiguación aumenta con un incremento en el tiempo derivativo, pero disminuye si el valor del tiempo derivativo es demasiado grande. |
My_Gains.DerivativeGain | Ganancia derivativa de PID (> 0,0). | |
AutoTune | Cuando se establece en Cierto y Auto e Initialize son Falso, la secuencia AutoTune se inicia. | |
ATParameters | ||
Load |
| |
Deviation |
| |
Step | El proceso de ajuste automático considera el modo en que reacciona el valor de proceso a los cambios en los valores de paso y deriva los parámetros Gain. | |
ATDynaSet |
| |
ATReset |
| |
Parámetros de salida | ||
AbsoluteError | Error absoluto (Process - SetPoint) del controlador. | |
ATWarning | Advertencia de la secuencia de ajuste automático. Los valores posibles son:
| |
OutGains | Ganancias calculadas tras secuencias de autoajuste. | |
Entregue su opinión