미네소타에 기반을 둔 장비 공급업체 Aagard의 성공은 고객과의 긴밀한 파트너십, 그리고 혁신적이고 영향력 있는 포장 솔루션을 제공하는 기술에 대한 끊임없는 추구에 달려 있습니다.
“우리의 핵심 가치 제안 중 하나는 협업 방식입니다.”라고 Aagard의 기술 영업 부사장 Jason Norlien이 말했습니다. “우리 애플리케이션 엔지니어는 최종 사용자와 직접 협력하여 아이디어를 제안하고, 그들의 요구를 충족하며 종종 기대를 뛰어넘는 맞춤형 솔루션을 개발합니다.”
이 회사는 점점 더 유연한 종단 포장 옵션에 대한 고객의 요구에 직면하고 있습니다.
“전자상거래는 확실히 더 큰 세그먼트가 되고 있습니다.”라고 Norlien은 말했습니다. “공장에서는 더 작은 케이스 SKU를 생산할 수 있는 유연성이 필요하며, 잠재적으로 소비자에게 직접 배송할 수도 있습니다. 또한 다양한 케이스 포장을 자동화하는 더 나은 방법을 찾고 있습니다.”
Aagard는 Rockwell 제어 기술과 디지털 도구의 창의적 활용을 통해 이러한 문제와 기타 새로운 산업 과제를 해결하는 데 주력하고 있습니다.
ICT 및 로봇으로 유연성 재정의
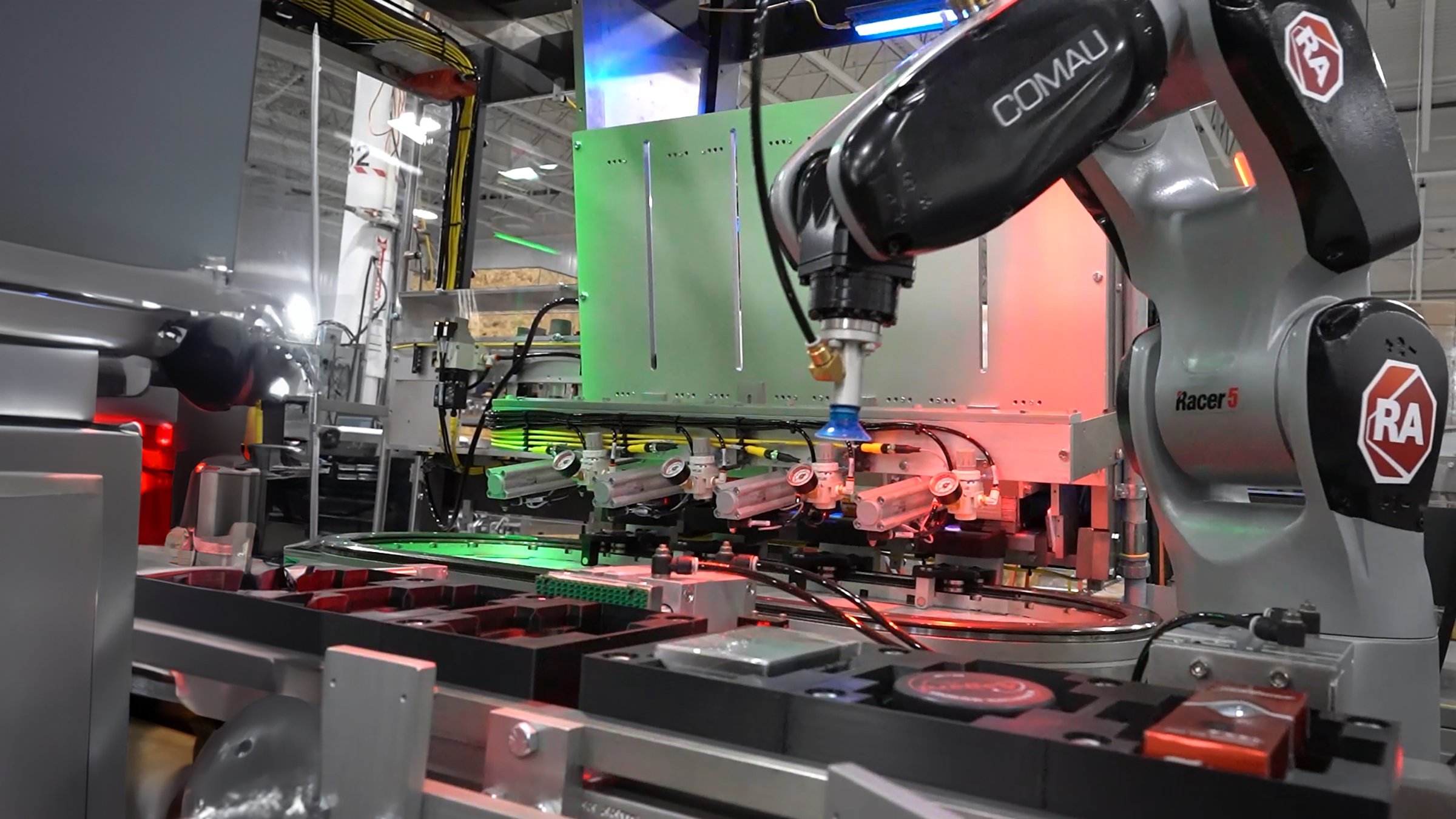
고객이 요구하는 민첩하고 효율적인 장비를 실현하기 위해 Aagard는 종종 로봇과 iTRAK® 독립형 카트 기술(ICT)를 활용합니다. 이 회사의 최신 설계는 다양한 포장 수요를 충족하기 위해 두 가지 기술을 하나의 애플리케이션에 결합합니다.
“10년 전 사용되던 기술로는 다양한 포장에 가장 실용적인 접근 방식이 수동 재포장이었습니다.”라고 Norlien은 말했습니다. “일반적으로 균일한 제품의 포장 케이스가 공동 포장업체로 배송되어 수작업으로 개봉 및 재포장되었습니다.”
이 회사의 자동화된 다양한 팩 솔루션은 이러한 상황을 바꾸고 폐기물과 인력 요구 사항을 최소화하는 것을 목표로 합니다.
고정 속도와 피치에 기반한 기존 컨베이어와 달리, iTRAK ICT는 여러 자석 추진 무버를 독립적으로 제어하여 제품을 운송할 수 있습니다. iTRAK 시스템에서는 가속, 감속, 속도 및 위치를 프로그래밍할 수 있으며, 시스템이 작동을 시작하면 프로세스에 따라 필요에 따라 속도와 거리를 자동으로 조정합니다.
Aagard의 한 케이스 포장 시스템에서는 iTRAK가 갠트리 로봇과 결합되어 동일 제품의 다양한 맛을 수천 가지 구성으로 포장합니다. 최근 설계에서는 iTRAK가 다양한 제품을 6축 관절형 로봇에 제공하여 맞춤형 멀티팩을 선택하고 만듭니다. 옵션은 사실상 무한합니다.
Aagard의 애플리케이션 엔지니어링 매니저 Jonas Capistrant는 “ICT와 함께 로봇을 사용하면 작업자가 작업자 인터페이스에서 올바른 레시피를 선택하기만 하면 케이스 구성을 즉시 변경할 수 있습니다.”라고 말했습니다.
다양한 기술. 하나의 설계 플랫폼.
역사적으로 로봇, ICT 및 기타 메카트로닉스 기술을 시스템의 제어 플랫폼에 통합하는 것은 힘들고 시간이 많이 소요되는 과정이었습니다. 기존 애플리케이션에서는 이러한 각 기술이 별도의 컨트롤러에서 실행됩니다.
“이러한 접근 방식의 문제는 타사 컨트롤러를 이해하고 이를 제어 플랫폼에 통합하는 방법을 아는 인력이 필요하다는 점입니다.”라고 Capistrant는 말했습니다.
Rockwell에서 제공하는 내장된 운동학 로봇 제어 기능이 있는 Logix 컨트롤러를 사용함으로써, Aagard는 이제 시스템 설계에 통합된 접근 방식을 취할 수 있습니다. 운동학 기능을 통해 컨트롤러가 다축 로봇 제어를 실행할 수 있으므로, 일반적으로 패키징 애플리케이션에 로봇을 통합할 때 필요한 추가 컨트롤러, 소프트웨어 및 특수 기능 블록을 제거할 수 있습니다.
“Rockwell 컨트롤러에서 ‘XYZ’ 좌표로 시스템을 프로그래밍하는 방법을 알고 있다면 로봇을 프로그래밍할 수 있습니다.”라고 Capistrant는 설명했습니다. “이는 여러 제어 플랫폼을 지원할 수 있는 제어 엔지니어링 인력을 관리할 필요가 없기 때문에 우리와 고객 모두에게 큰 이점입니다.”
시뮬레이션을 통한 설계 생산성 향상
설계 생산성과 동시 엔지니어링을 더욱 지원하기 위해 Aagard는 Emulate3D™ 기술을 활용하고 있습니다. 이 시뮬레이션/에뮬레이션 소프트웨어는 장비 개발 주기 초기에 가상 세계에서 기술적 문제를 해결하는 데 사용할 수 있는 동적 모델, 즉 “디지털 트윈”을 제공합니다.
“로봇을 실제로 갖기 전에 로봇을 작동할 수 있습니다.”라고 Capistrant는 설명했습니다. “이는 새로운 복잡한 기술을 도입할 때 큰 이점이며, 어디에서나 시스템에서 작업할 수 있는 원격 작업자와의 협업도 용이하게 합니다.”
작업자 지원을 위한 더 나은 방법: Rapid LaunchTM
Aagard는 유연한 장비 성능이 숙련된 작업자에게도 달려 있다는 사실을 인식하고 있습니다. 이에 따라 고객을 지원하기 위해 장비 작동, 전환 및 유지보수를 용이하게 하는 방법을 지속적으로 모색하고 있습니다.
“지난 몇 년 동안 Aagard는 전환 경험 개선에 엄청난 노력을 기울여 왔습니다.”라고 Capistrant는 말했습니다. “숙련된 작업자를 찾기 어렵다는 것을 알고 있기 때문에 전환 관점에서 장비를 더욱 유연하게 만들고 있습니다.”
특히, 이 회사는 Rapid Launch 기능을 개발하여 최소한의 교육만으로도 모든 작업자가 주어진 범위 내에서 모든 제품 크기를 쉽게 설정할 수 있도록 했습니다. 앞으로는 모든 새로운 Aagard 장비에 Rapid Launch가 표준으로 탑재될 예정입니다.
자세히 알아보기OEM 솔루션에 대해 자세히 알아보십시오.

