Control de Seguridad con Arrancador M100
Esta aplicación muestra las ventajas de la seguridad y el control inteligente con el novedoso M100 de sgeuridad de Rockwell Automation.
Descargas
Tenga en cuenta: deberá aceptar los Términos y Condiciones para cada descarga.
¿Necesita ayuda?
Si necesita ayuda con alguna aplicación o tiene comentarios acerca del Innovation Center, por favor contáctenos.
¿Para qué sirve esto?
El objetivo principal de los Ingenieros Certificados en Seguridad Funcional (FS Engineers) es garantizar que las aplicaciones de control y seguridad sean diseñados, implementados y mantenidos conforme a las normas locales, regionales e internacionales de seguridad como ISO 12100, ISO 13849, IEC 62061 entre otras.
Sus funciones claves son las de evaluar los riesgos, definir las medidas técnicas probadas para reducir los riesgos y mantener la protección de las distintas personas que intervienen la máquina. Diseña la arquitectura de control seguro cumpliendo con los niveles de integridad resultantes del análisis de riesgo. Utiliza tecnología de vanguardia para garantizar la productividad y la seguridad de las personas asegurándose de la trazabilidad documental y la correcta gestión del ciclo de vida de seguridad. Todo esto pensado en reducir los riesgos y proteger a las personas, así como garantizar el cumplimiento legal normativo del país donde se use la máquina.
En esta aplicación veremos cómo resolver una situación de seguridad en una máquina ejemplo y recorreremos el ciclo de vida de seguridad como lo hacen los Ingenieros de Seguridad Funcional usando equipo de control se Seguridad de vanguardia como el M100, CR30, etc.
¿Esto me resulta útil?
Conocerá todas las etapas del ciclo de vida de seguridad que se deberían llevar a cabo en todas las aplicaciones de control. Desde el análisis de riesgos de la máquina, la propuesta metódica de la reducción de riesgos técnica de la máquina hasta la implementación técnica de las medidas de seguridad donde se observará que el uso de tecnología actual y de vanguardia de seguridad es fundamental para las implementaciones porque no solo protege mejor a los activos, sino que también hace las operaciones más eficientes, sostenibles y competitivas.
Todo esto se demostrará en una aplicación donde hemos tomado como ejemplo una máquina virtual envolvedora y aplicaremos el diseño en una función de seguridad ejemplo para mostrar el procedimiento completo desde el análisis de riesgos hasta su implementación, remarcando porqué es conveniente el uso de tecnología de vanguardia y sus ventajas como:
- Integración a Sistemas Inteligentes.
- Diagnóstico avanzado y Mantenimiento predictivo.
- Menor complejidad y costos de implementación.
- Mayor confiabilidad y vida útil.
- Cumplimiento normativo.
Enfocando la atención en el uso del arrancador electrónico de control de seguridad M100.
¿Cómo puedo hacerlo funcionar?
Requisitos: productos, herramientas, conocimientos previos.
Se Requieren conocimientos previos de los siguientes tópicos:
- RASWin – Risk Assessment Software for Windows.
- CCW – Connected Components Workbench.
- CR30 – Relevador de Seguridad Configurable por Software.
- M100 – Arrancador de Control y Seguridad.
Links of Interest (internal or external)
Guía de Implementación
Paso 1.1 - Analizar la máquina para hacerla segura.
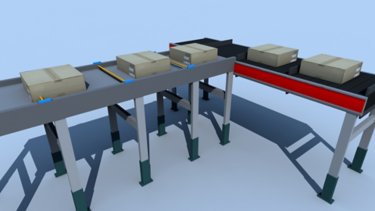
Para conocer todo el ciclo de vida de seguridad en una aplicación, tomaremos como ejemplo la siguiente máquina envolvedora y comenzaremos a realizar un análisis de riesgos para conocer los niveles de riesgo de las distintas tareas de intervención en la máquina en su operación.
intelligent-safety-using-the-m100-control-starter_S1P1.png
Nota: Cuando se realiza el análisis de riesgos inicial, el Ingeniero en Seguridad Funcional debe considerar la máquina sin ninguna guarda física o cualquier dispositivo de seguridad si es que los tiene. Es por esta razón que empezaremos con la máquina construida sin guardas.
Procederemos a seguir el ciclo de seguridad tal como se muestra en los pasos siguientes:
intelligent-safety-using-the-m100-control-starter_S1P2.png
Paso 1.2 - Para tener una máquina segura es necesario por iniciar con un análisis de riesgos de la máquina de acuerdo con el estándar ISO 12100.
Para este ejemplo utilizaremos el Software RASWin que es una herramienta de análisis de riesgo e ingeniería diseñada para acompañar a los ingenieros a lo largo de la todo el ciclo de vida de seguridad en maquinaria industrial; el cual simplifica tareas complejas durante todo el desarrollo.
Lanzaremos el Software RASWin versión 7.6.
intelligent-safety-using-the-m100-control-starter_S1P3.png
intelligent-safety-using-the-m100-control-starter_S1P4.png
Realizar el análisis de riesgos de la máquina envolvedora de acuerdo con ISO 12100.
Procederemos a hacer el proceso de análisis de riesgos en la máquina definido por el estándar ISO 12100 usando la herramienta de RASWin.
El proceso que siguen los Ingenieros en Seguridad Funcional son los siguientes para hacer la evaluación en toda la máquina:
intelligent-safety-using-the-m100-control-starter_S2P1.png
Paso 2.1 - Definir el alcance del análisis por medio de las características y límites de la máquina.
Usaremos el Software para ingresar toda la información pertinente de la máquina a ser analizada. Es importante responder todos los campos y pasar por todos los tabs especificados. Esto es para no saltar información que posiblemente pudiera ser importante en el análisis. En los campos donde no aplique no es conveniente dejarlos en blanco sino poner la palabra NA.
intelligent-safety-using-the-m100-control-starter_S2.1P1.png
- Asegurarse que estemos en el módulo de “Información”.
- Llenar todos los campos de Datos del Proyecto de RASWin, así como la Configuración de Proyecto tal cual se muestra.
- Pasar por cada uno de los Tabs y llenar la información requerida de las características y límites operativos de la máquina.
De esta manera se concluye el primer paso del análisis.
Paso 2.2 - Identificación de los peligros de la máquina.
El siguiente paso es el de Identificar los peligros de la máquina. Seguiremos alimentando con información al proyecto iniciado en RASWin con los siguientes pasos:
intelligent-safety-using-the-m100-control-starter_S2.2P1.png
- Cambiar al módulo de Puntos de acceso de peligro. Aparecerá una hoja en blanco.
- Oprimir mouse derecho y saldrá una selección. Elegir “Cargar imagen de fondo”. Elegir la foto o imagen que represente nuestra máquina para comenzar un análisis de cada punto de acceso del operador.
- Seleccionar el recuadro de la parte de baja del software para delimitar el área del o de los puntos de acceso que tiene la máquina; en nuestro ejemplo vamos a seleccionar dos puntos de acceso.
- Se remarca con recuadro el primer punto de acceso A01 referente al cambio de navajas de la cinta envolvedora. La identificación del acceso es automática e incremental. Es decir, A01, A02, etc.
- Se remarca el recuadro con el segundo punto de acceso A02 referente al cambio de rollo.
Una vez creados los puntos de acceso se seleccionan uno por uno y se abre las propiedades de los accesos para nombrar “Cambio de Navajas” y “Cambio de Rodillo” respectivamente
intelligent-safety-using-the-m100-control-starter_S2.2P2.png
intelligent-safety-using-the-m100-control-starter_S2.2P3.png
Paso 2.3 - Estimar y Evaluar el Riesgo de los Peligros encontrados en la máquina.
Los dos siguientes pasos del proceso de análisis de riesgo van de la mano; una vez encontrados los peligros de los puntos de acceso, se estimará el riesgo de cada uno de ellos y se evaluará que tan altos son cada uno de esos riesgos para comenzar a tomar decisiones de que tan critico podría ser no hacer una implementación al momento o si se pudiera postergar la implementación en algunos de los peligros encontrados.
Realicemos los siguientes pasos:
- Seleccionemos el módulo “Evaluación de Riesgos”.
- Seleccionemos el “Cálculo HRN Inicial” esto será el calculo de riesgo del punto de acceso inicial, sin resguardos de ningún tipo.
- Seleccionar el Punto de Acceso “A01 – Cambio de Navajas” que fue creado en el paso anterior.
- Seleccionar añadir en Modo de trabajo “Automático”, Operación normal automática de la envolvedora.
- Agregar un Riesgo de acuerdo a la normativa ISO 12100. De acuerdo a lo observado, el operador cuando realiza la actividad de cambiar las cuchillas tiene un riesgo de corte en sus manos y se incrementa el riesgo si hay movimientos adicionales de la máquina, y aun más si la velocidad del mecanismo es mayor.
- El riesgo que vamos a seleccionar es el de “Peligro de Cizallamiento”, en el que dependiendo de las circunstancias podría ser demasiado peligroso. Siempre pensemos en el peor de los casos que es el que se mueva el mecanismo a velocidad nominal de producción al momento de cambiar las cuchillas. En base a este caso se procederá a medir o estimar el riesgo.
intelligent-safety-using-the-m100-control-starter_S2.3P1.png
7. Escribir una descripción lo mas detallada posible acerca de la actividad que realiza el operador cuando hace esta actividad. Y seleccionar de cada columna siguiente la opción mas adecuada para este caso analizado.
a. FE – Frecuencia de Exposición. Se responde a la pregunta: ¿Cada cuando se realiza esta actividad? Y se utiliza la siguiente tabla de ponderación de riesgos llamada HRN (Hazzard Rating Number.
i. Anual – 0.5
ii. Mensual – 1
iii. Semanal – 1.5
iv. Diario – 2.5
v. Cada hora – 4
vi. Constante – 5
En nuestro caso seleccionaremos el valor 2.5 por que la actividad de cambio de navajas es una vez al día.
b. LO- Probabilidad de que un evento inesperado suceda. Se responde a la pregunta: ¿Qué tan probable es que suceda el accidente si se hace la actividad sin ningún resguardo de protección? También se utiliza la tabla de ponderación LO del HRN siguiente:
i. Poco Posible, bajo circunstancias extremas – 0.033
ii. Altamente improbable, pero posible – 1
iii. Posible, pero inusual – 2
iv. Aunque improbable. Puede ocurrir – 5
v. Probable. No sorprendente – 8
vi. Probable. Puede esperarse – 10
vii. Cierto. Sin duda – 15
En nuestro caso seleccionamos el valor de 10, debido a que, si consideramos nada de resguardos, esperaríamos que pueda esperarse el evento analizado.
c. DPH- Grado de máxima Perdida. Es la consecuencia mayor que resulte del evento analizado. Se utiliza la siguiente tabla HRN:
i. Rasguños, Moratones – 0.1
ii. Quemadura, Corte, Enfermedad de corta duración – 0.5
iii. Fractura menor de un hueso, O enfermedad temporal – 2
iv. Fractura mayor de un hueso, O enfermedad temporal – 4
v. Pérdida de un miembro, ojo o sentido auditivo – 6
vi. Pérdida de los dos miembros, ojos o sentido auditivo – 10
vii. Fatalidad – 15
En nuestro caso seleccionamos el valor de 6, debido a que se pueda perder un dedo al estar cambiando las cuchillas y la máquina se mueve a velocidad nominal.
d. NP- Numero de personas. Es el numero de personas en peligro que podrían sufrir un daño durante el evento. Se utiliza la siguiente tabla:
i. 1-2 Personas – 1
ii. 3 -7 Personas – 2
iii. 8 -15 Personas – 4
iv. 16 - 50 Personas – 8
v. Más de 50 – 12
En nuestro caso seleccionamos el valor de 1. En aplicaciones de maquinaria es común seleccionar el valor de 1. En aplicaciones de proceso, por ejemplo, el número de personas que podrían estar en riesgo en el mismo evento podría ser mayor.
8. Una vez seleccionado las cuatro tablas, el software RASWin hace el cálculo de del HRNi – Hazzard Rating Number inicial, el cual es la multiplicación de los 4 factores anteriores seleccionados; es decir, FE (2.5) x LO (10) x DPH (6) x NP (1) = HRNi (150).
El resultado de 150 del cálculo de riesgo para esta actividad es catalogado como “Alto” y está basado en la siguiente tabla:
i. 0 > HRNi <= 5 - Riesgo Despreciable.
ii. 5 > HRNi <= 50 – Riesgo Bajo pero relevante.
iii. 50 > HRNi <= 500 – Alto.
iv. 500 > HRNi <= 13500 – Inaceptable.
Paso 2.4.- El proceso se repite para calcular el riesgo de todos los peligros definidos en la etapa anterior de identificación de peligros de la máquina. En nuestro ejemplo, encontramos el riesgo de Cambio de Rollo, por lo que tenemos que seleccionar los valores adecuados para esa actividad. La configuración sería como sigue:
intelligent-safety-using-the-m100-control-starter_S2.3P2
Cambiamos al punto de acceso de Cambio de Rollo, Seleccionamos un Peligro de arrastre o de atrapamiento, llenamos la descripción con información relevante de la actividad y seleccionamos los valores de las 4 tablas anteriores. Una vez seleccionados los 4 valores el software nos calcula el HRNi de esta actividad. En este caso, el valor es de 100, menor que el HRNi del cambio de navajas, pero sigue siendo un riesgo “Alto”.
Para el caso de este ejercicio, solo vamos a solucionar el riesgo del cambio de navajas, solo para fines demostrativos. Y se seguiría el mismo procedimiento para cualquier los procedimientos de reducción de riesgos de los demás peligros encontrados.
Reducción de Riesgos para el Cambio de Cuchillas & Especificación de Funciones de Seguridad.
De acuerdo con el paso anterior, encontramos que el Riesgo para el cambio de cuchillas es de 150, lo que corresponde a un riesgo “Alto”. Por tanto, es responsabilidad del Ingeniero de Seguridad Funcional ofrecer una solución técnica para reducir el riesgo al realizar esta actividad. Por tanto, entraremos a la etapa de Reducción de Riesgos de acuerdo con el estándar ISO 12100.
La metodología usada para reducir el riesgo es propuesta en el estándar y representada como sigue:
intelligent-safety-using-the-m100-control-starter_S3P1.png
El Ingeniero de Seguridad Funcional deberá sugerir soluciones de una manera jerárquica, siempre pensando en resolver la inseguridad primero por diseño, después por resguardos físico, después por resguardos tecnológicos y por último por procedimientos administrativos.
intelligent-safety-using-the-m100-control-starter_S3P2.png
Resolvamos el caso de reducción de riesgos de cambio de cuchillas usando el RASWin de la siguiente manera:
1. Cambiar al Calculo HRN final.
2. Asegurarse seleccionar el punto de acceso “Cambio de Navajas”
3. Notará que hay una columna de “Medidas Correctoras”.
intelligent-safety-using-the-m100-control-starter_S3P3.png
Seleccionaremos este recuadro para comenzar a proponer las medidas de reducción de riesgos de manera jerárquica y aparece la siguiente pantalla:
A. Oprimir “Añadir” para agregar la primera medida correctora.
B. Seleccionar por “Diseño”, después seleccionar “Otras medidas Correctoras”. Colocar en Información Adicional el diseño sugerido de la guarda, así como cargar la imagen sin resguardo (Antes) y la imagen o diseño de la Guarda como queremos que quede (Después).
C. Poner por nombre “Guarda con diseño específico”
intelligent-safety-using-the-m100-control-starter_S3P4.png
intelligent-safety-using-the-m100-control-starter_S3P5.png
Como esta medida no es suficiente, debemos regresar a la selección de medidas y proponer una solución adicional con un dispositivo de enclavamiento o Interlock de Seguridad para la guarda propuesta:
1. Añadir una nueva medida correctora.
2. Seleccionar “ingeniería de Control”, después “Componentes de Seguridad”, posteriormente seleccionar “Resguardo móvil con enclavamiento” y “el peligro desaparece cuando se abre el resguardo” y colocar la información como aparece a continuación acerca del tiempo de paro de la máquina para el calculo de distancias y al final oprimir el ícono SF.
intelligent-safety-using-the-m100-control-starter_S3P6.png
Aparecerá la siguiente pantalla.
intelligent-safety-using-the-m100-control-starter_S3P7.png
Llenar la función de seguridad del Interlock como aparece en la pantalla de arriba. Esto se conoce como los Requerimientos Funcionales de Seguridad. Es la especificación de cómo se debe diseñar la función de seguridad del Interlock de la puerta para el cambio de navajas.
Por último, necesitamos asignar el PLr (Performance Level Requerido) de esta función. Al oprimir el botón “Asignar PLr” aparecerá:
intelligent-safety-using-the-m100-control-starter_S3P8.png
La gravedad de la lesión puede ser la perdida de un miembro (Dedo), la frecuencia el frecuente (1 vez al día) y sin seguridad es imposible evitar el daño por lo que nos lleva a la asignación de PLr = PLe. Al Aceptar ya hemos acabado la segunda propuesta de reducción de riesgos.
Poner el Nombre de “Interlock de Seguridad”.
También nos percatamos que en la máquina hay un claro donde se puede tomar muestras de producto antes de envolverlo y sugerimos que se ponga una cortina de luz, para parar la maquina si alguien ingresa la mano. Similar a lo que se hizo con la función anterior, generaremos la especificación de la nueva función de seguridad como se muestra en las siguientes figuras.
intelligent-safety-using-the-m100-control-starter_S3P9.png
intelligent-safety-using-the-m100-control-starter_S3P10.png
intelligent-safety-using-the-m100-control-starter_S3P11.png
intelligent-safety-using-the-m100-control-starter_S3P12.png
De la misma manera se dan de alta las medidas administrativas de Indicaciones de Seguridad y entrenamiento a operadores; de esta manera podemos bajar la posibilidad de daño al operador a una probabilidad de Poco posible bajo circunstancias extremas y el cálculo final del riesgo resulta despreciable. Quedando de esta manera la solución completa de reducción de riesgo de la actividad de cambio de navajas:
intelligent-safety-using-the-m100-control-starter_S3P13.png
Funciones de Seguridad
Paso 4.1 - Diseño de las Funciones de Seguridad
Una vez hecha las especificaciones funcionales procederemos a diseñar cada una de las funciones tal como fueron especificadas en al paso anterior cumpliendo con los niveles de Seguridad correspondientes.
Vamos a agregar la función de Paro de Emergencia que se deberá dar de alta en el RASWin de la misma manera como lo hemos mostrado anteriormente, Por lo que vamos a hacer la realización de las siguientes funciones de Seguridad:
intelligent-safety-using-the-m100-control-starter_S4.1P1.png
La función de Paro de emergencia agregada tiene los siguientes requerimientos funcionales:
intelligent-safety-using-the-m100-control-starter_S4.1P2.png
intelligent-safety-using-the-m100-control-starter_S4.1P3.png
Continuando con el diseño dentro de la aplicación RASWin continuaremos con los siguientes pasos:
- Movernos a la opción de “Layout Matriz de Seguridad”.
- Aparecerá el toolbox de Elementos.
- Oprimir en “Entradas” y aparecerá el listado de entradas de seguridad posibles.
- Seleccionar para la primera función de seguridad el Interruptor de Contacto” y arrastrar la imagen en la posición que se desea colocar.
- Seleccionar para la segunda función de seguridad la “Barrera Seguridad” y arrastrarla la imagen en la posición que se desea colocar.
- Mover el selector porque la lista continúa y seleccionar el “Botón Paro de Emergencia y arrastrarlo en la posición que se desea.
Continuaremos con el elemento de lógica y de salida para representar las funciones de seguridad que se van a diseñar:
- Seleccionar el tab de elementos de Lógica. Se desplegarán todos los elementos de lógica de seguridad que podemos usar.
- Seleccionar el elemento “Relé de Seguridad” y arrastrar la imagen en la posición que se desea colocar.
intelligent-safety-using-the-m100-control-starter_S4.1P4.png
Lo mismo haremos para la Salida:
- Seleccionar el tab de elementos de Salidas. Se desplegarán todos los elementos de salidas de seguridad que podemos usar. Por el momento no aparece el ícono del M100S, por lo seleccionaremos otro elemento parecido,
- Seleccionar el elemento “Módulo de Ampliación” y arrastrar la imagen en la posición que se desea colocar. Seleccionaremos por el momento este icono, aunque en los datos de seguridad funcional utilizaremos el del M100S.
intelligent-safety-using-the-m100-control-starter_S4.1P5.png
Paso 4.2 - Configurar los elementos de seguridad
Configuraremos cada uno de los elementos de Entrada (que son los primeros tres), el de Lógica (uno) y el de Salidas (uno) dentro de la misma pantalla seleccionaremos cada uno de ellos con doble click y llenaremos los campos de la información de cada uno de los elementos de la manera siguiente:
- Llenar todos los campos con el nombre del fabricante que hayamos elegido y el modelo de producto que vamos a especificar y comprar.
- Seleccionar “Editar Conexiones” y se abrirá la ventana de “Editor de conexiones”
- En el “Editor de Conexiones” estará un listado de salidas de seguridad que hayamos seleccionado en el paso anterior. En este caso solo dimos de alta uno. Seleccionaremos el elemento “32000”.
- Seleccionaremos el botón “Añadir conexión”. Con esto, damos a entender que este elemento de entrada marca “Rockwell” modelo 440N actuará sobre este elemento de salida a través de una lógica que se definirá después.
intelligent-safety-using-the-m100-control-starter_S4.2P1.png
Continuaremos configurando de la misma manera los demás elementos de entrada. Quedando como sigue:
Cortina de Luz:
intelligent-safety-using-the-m100-control-starter_S4.2P2.png
Paro de emergencia:
intelligent-safety-using-the-m100-control-starter_S4.2P3.png
Daremos doble click en la Lógica de seguridad para configurar el producto seleccionado con las siguientes diferencias:
- Llenar los campos de producto seleccionado. Tal es el caso del Guardmaster 440CR30.
- Seleccionar el botón de “De base de datos” y se abrirá la ventana de “Selección de parámetros del PLC” Aquí tenemos la opción de crear los parámetros si es que son especiales de un controlador de seguridad de otra marca.
- Seleccionar el botón de “Abrir”. En nuestro caso, como hemos seleccionado un equipo de Rockwell, se tiene una base de datos con los parámetros de seguridad que necesita el PLC; en este caso el CR30.
- Simplemente se selecciona la base de datos “PLCs.mdb”
- Y se llenará automáticamente la zona de Parámetros de Seguridad del Fabricante en la parte de Entradas y en la parte de Salidas. Estos parámetros son importantes que se configuren en el proyecto final.
intelligent-safety-using-the-m100-control-starter_S4.2P4.png
Lo siguiente es configurar las conexiones del PLC desde la misma ventana de acuerdo con lo siguiente:
- Seleccionar “Entradas” para abrir la ventana de Conexiones de entradas posibles del PLC.
- Seleccionar las entradas que correspondan que se van a cablear a esta lógica de control de seguridad.
- Aceptar.
- Seleccionar “Salidas” para abrir las conexiones de salidas posibles del PLC.
- Seleccionar la salida que estará conectada a esta lógica de control de seguridad.
- Aceptar y ¡Listo!
intelligent-safety-using-the-m100-control-starter_S4.2P5.png
Procederemos a configurar la Salida de seguridad haciendo doble click en el icono de salidas de la pantalla principal:
- Debido a que el ícono no correspondía con el nuevo producto M100S, seleccionamos el icono de imagen para cambiarla.
- Bajar la imagen del M100S de internet y al seleccionarla podremos cambiar la imagen en esta ventana.
- Llenar los campos de acuerdo con las especificaciones de este nuevo producto.
- Seleccionar “Configuración de PLC” para que abra la ventana de “Parámetros de PLC”.
- Como configuramos los parámetros del PLC en el paso anterior aquí aparecen; lo único que debemos poner es la configuración de cada uno de los parámetros tal y como se espera que se vayan a configurar en la realidad.
- Aceptar y ¡listo!
intelligent-safety-using-the-m100-control-starter_S4.2P6.png
Cálculo y verificación de los PL´s requeridos de las funciones de Seguridad con las marcas y modelos seleccionados.
Una vez definidos los productos que se utilizarán para cada una de las funciones de seguridad, es importante verificar el correcto diseño con los cálculos de seguridad para comprobar que los niveles PL´s Alcanzados sean igual o mayor a los PL´s Requeridos desde el análisis de riesgos; ie, Pla >= PLr para cada una de las funciones de seguridad.
Recordemos que estamos diseñando las siguientes funciones de seguridad que tiene que cumplir con los PLr definidos y en el paso anterior, hemos elegido ciertos productos de Rockwell; por tanto, tenemos que verificar que con estos equipos podemos cumplir con los PL´s:
Para realizar los cálculos de las funciones de seguridad se tiene dos opciones de herramientas:
- Software “SISTEMA - Safety Integrity Software Tool for the Evaluation of Machine Applications”. Es la opción más común y reconocida hasta ahora.
- Software RASWin. Podemos continuar dentro del ambiente de esta plataforma. Esta opción no es yan conocida como el software anterior, y por eso realizaremos los cálculos en RASWin.
intelligent-safety-using-the-m100-control-starter_S5P1.png
Primero tenemos que verificar si tenemos cargada en el RASWin la base de datos de Seguridad Funcional de Rockwell Automation, esta es la misma base de datos que se cargaría en el Software SISTEMA si es que se quiere usar ese software.
- Seleccionar “Usuario”
- Seleccionar “Gestionar carpetas”
- Se abrirá la ventana de Gestión de carpetas y en la opción “Librerías VDMA” verificar la localización donde el software busca esta base de datos. Esta carpeta se puede cambiar a otra si es que se quiere hacerlo.
- Verificar en el explorador de Windows que esa localidad tenga un Folder llamado “Rockwell” y adentrarnos a este.
- Verificar que se tenga el VDMA más actual. Es un archivo XML que se baja desde la página web de Rockwell.
VDMA es una Asociación Alemana de Fabricantes de Maquinaria y maneja bases de datos de equipos utilizados en la maquinaria para uso de información generalizada e incluye datos de seguridad funcional de los proveedores. Rockwell y otras compañías ponen los datos de sus productos en formato VDMA para ser usados por el público.
intelligent-safety-using-the-m100-control-starter_S5P2.png
Una vez que nos aseguramos de que RASWin va a utilizar la base de datos de seguridad funcional de Rockwell entonces procederemos a realizar los cálculos:
- Seleccionar “PL Grafico”.
- Vemos el listado de funciones de seguridad que debemos implementar. Aparecen en color rojo porque no hemos hecho los cálculos todavía.
- El recuadro de los cálculos aparece en blanco.
intelligent-safety-using-the-m100-control-starter_S5P3.png
Configuraremos cada una de las funciones de seguridad, lo mostraremos en la primera función:
- Ampliar la primera función de seguridad llamada “01 -STO_Interlock de puerta de cortadora”. Aparecen los tres componentes de la función: Entrada, Lógica y Salidas, al igual que el modo de operación automático definido desde el principio.
- Oprimir mouse derecho en Componente de Entrada para configurarlo y aparecerá un listado de opciones.
- Seleccionar “Añadir Componente con datos PL definido”. RASWin buscará los datos del dispositivo en la base de datos VDMA.
- Seleccionar el Interlock Switch Sensaguard ya que estamos configurando la primera función de seguridad correspondiente al Interlock.
intelligent-safety-using-the-m100-control-starter_S5P4.png
Una vez seleccionado el interlock, veremos lo siguiente:
De la misma manera se seleccionará el equipo “Software Configurable Safety Relay como componente Lógico y el componente “Monitoring Safety Relay como componente de Salida. Hay que recordar que no vamos a usar este último componente, sino usaremos un nuevo producto que no está en la base de datos todavía y tendremos que meter los datos de seguridad de este producto de manera manual.
intelligent-safety-using-the-m100-control-starter_S5P5.png
Tenemos que ver el manual de producto M100S para ver la información del fabricante que nos da; y encontramos los siguientes datos importantes como que es Cat 3 y su PFH de 4.0E-09.
intelligent-safety-using-the-m100-control-starter_S5P6.png
Por tanto, realizaremos los pasos adicionales:
- Configuración antes de hacer los cambios manuales.
- Dar mouse derecho sobre el elemento de salidas que queremos modificar.
- Seleccionar “Editar”
- En la ventana que aparece, modificar el nombre del producto relatico al M100S.
- Poner el dato de PFH correspondiente al manual de este equipo.
- Seleccionar la casilla para verificar que este nuevo dato corresponde con PLe.
- Seleccionar el tab “Categoria”
- Seleccionar la Categoria 3 correspondiente con el manual de este producto y darle aceptar.
intelligent-safety-using-the-m100-control-starter_S5P7.png
Hemos terminado con los cálculos de la primera función de seguridad llamada A01.01 – STO Interlock de puerta de cortadora con la siguiente conclusión:
Note los puntos en verde que aparecen a un lado de los dispositivos, esto significa que han sido bien configurados para hacer el cálculo de PL para la función de seguridad específica.
intelligent-safety-using-the-m100-control-starter_S5P8.png
Lo siguiente es continuar haciendo el mismo procedimiento para las otras dos funciones de seguridad y obtenemos los siguientes resultados y conclusiones:
Se demuestra que las tres funciones de seguridad que se van a implementar con los respectivos productos de Rockwell cumplen los requerimientos de seguridad funcional; los PL´s calculados de todas las funciones superan o igualan a los PLr requeridos desde el análisis de riesgo y requerimientos funcionales. Por lo que procederemos a hacer la ingeniería de seguridad para implementar estas tres funciones.
intelligent-safety-using-the-m100-control-starter_S5P9.png
Diseño de las Funciones de Seguridad con los productos seleccionados en el paso anterior.
Nos apoyaremos de diagramas esquemáticos para iniciar nuestro diseño de cada una de las funciones de seguridad:
intelligent-safety-using-the-m100-control-starter_S6P1.png
Revisando las especificaciones funcionales, observamos que todas estas funciones requieren de restablecimiento manual y de botón de arranque adicional después de un paro de seguridad, por lo que en nuestra ingeniería integraremos dos números de catalogo adicionales:
intelligent-safety-using-the-m100-control-starter_S6P2.png
Por lo tanto, nuestra implementación con los productos antes seleccionados quedaría como sigue:
intelligent-safety-using-the-m100-control-starter_S6P3.png
Desarrollo del Programa de Control de Seguridad.
Comencemos con la configuración del controlador de seguridad configurable por software CR30 con el uso de la herramienta de programación CCW. (Connected Component Workbench).
intelligent-safety-using-the-m100-control-starter_S7P1.png
Al abrir el software, crearemos el proyecto de seguridad:
- Seleccionar “New.”
- Nombrar el proyecto.
- Seleccionar “Create”
intelligent-safety-using-the-m100-control-starter_S7P2.png
Por lo tanto, nuestra implementación con los productos antes seleccionados quedaría como sigue:
intelligent-safety-using-the-m100-control-starter_S6P3.png
Seleccionar el controlador de seguridad y agregarlo al proyecto.
- Expandir carpeta de “Safety” y la de “440C Safety Relays”.
- Seleccionar “440C-CR30-22BBB” y “Select”.
- Seleccionar “Add To Project”
intelligent-safety-using-the-m100-control-starter_S7P3.png
Luego, tenemos que configurar los módulos adicionales como el módulo de internet para comunicar este controlador CR30 con otros equipos, y el módulo de entradas y salidas estándar.
- Oprimir mouse derecho sobre el primer slot
- Seleccionar “Communication”, que es un módulo de comunicación a Ethernet.
- Seleccionar 440C-ENET
- Oprimir mouse derecho sobre el segundo slot
- Oprimir “Digital”
- Seleccionar “2080-IQ4OB4”, que es un módulo de entrada y salidas estándares.
- Por último, oprimir “Edit Logic”
intelligent-safety-using-the-m100-control-starter_S7P4.png
Por lo tanto, nuestra implementación con los productos antes seleccionados quedaría como sigue:
intelligent-safety-using-the-m100-control-starter_S6P3.png
Una vez que estemos editando la lógica de control, primero tenemos que colocar las entradas de las funciones de seguridad en el lado izquierdo, recordando que:
- La entrada de SF A01.01 es un Interlock de Seguridad con señales OSSD.
- La entrada de SF A01.02 es una Cortina de Luz con señales OSSD.
- La entrada de SF A02.01 es un Paro de Emergencia con señales digitales.
- Seleccionar “Gate Switch” y desplazarlo al primer elemento.
- Seleccionar “Light Curtain” y desplazarlo al segundo elemento.
- Seleccionar “Emergency Stop” y desplazarlo al tercer elemento.
- Expander la configuración de cada uno de los bloques.
intelligent-safety-using-the-m100-control-starter_S7P5.png
Y configurar estos tres elementos de la siguiente manera.
Note que debemos cablear de la siguiente manera:
- A01_01 Interlock de puerta doble canal a las entradas al CR30 de EI_00 y EI_01.
- A01_02 Cortina de Seguridad doble canal a las entradas al CR30 de EI_02 y EI_03.
- A02_01 Paro de Emergencia doble canal a las entradas del CR30 de EI_04 y EI_05 con dos fuentes “Pulse Testing” que son las salidas del CR30 EO_12 y EO_13.
- He modificado el nombre de los elementos para ser compatible con la documentación del proyecto hecho desde el RASWin.
intelligent-safety-using-the-m100-control-starter_S7P6.png
Por lo tanto, nuestra implementación con los productos antes seleccionados quedaría como sigue:
intelligent-safety-using-the-m100-control-starter_S6P3.png
Ahora vamos a seleccionar las salidas dentro del “Toolbox” y colocarla en el lado derecho de nuestra lógica:
La salida de las Funciones de Seguridad es un apagado por medio de Señales OSSD´s
- Seleccionar “Inmediiate OFF” y arrastrarlo al primer elemento de las salidas de seguridad.
intelligent-safety-using-the-m100-control-starter_S7P7.png
Verificar su configuración inicial de este elemento de salidas como se indica:
- El Feedback lo dejaremos en “None” ya que no es necesario cuando usamos el M100S.
- De acuerdo con las especificaciones funcionales (SRS) debemos tener un Restablecimiento Manual.
- Dejemos en blanco el “Reset Input” porque no lo hemos definido aún.
Note que:
- Hemos cambiado el nombre del elemento.
- La salida del CR30 que controlará al M100S son EO_18 y EO_19 configurada como “PT”, o sea OSSD.
intelligent-safety-using-the-m100-control-starter_S7P8.png
Por lo tanto, nuestra implementación con los productos antes seleccionados quedaría como sigue:
intelligent-safety-using-the-m100-control-starter_S6P3.png
Ahora configuremos la lógica de seguridad en la parte central.
De la misma manera, seleccionemos del “Toolbox” la lógica “AND” y conectemos los puntos con solo seleccionarlos entre ellos, y dejemos el código como se muestra a continuación.
intelligent-safety-using-the-m100-control-starter_S7P9.png
Agregaremos el Reset de las funciones de Seguridad, y también terminaremos de configurar el elemento de salida relacionado al M100S:
- Seleccionar “Reset” y arrastrarlo hasta la parte de abajo de los elementos de entrada en el código.
intelligent-safety-using-the-m100-control-starter_S7P10.png
Por lo tanto, nuestra implementación con los productos antes seleccionados quedaría como sigue:
intelligent-safety-using-the-m100-control-starter_S6P3.png
El Reset y el elemento de salida de seguridad deberán estar configurados de la siguiente manera:
Note lo siguiente:
- Para el Reset se seleccionó la entrada 01 del Modulo 2 del Plug-In (P2_01)
- Para la configuración del elemento final de salida se selecciona la instrucción SMF4 como la entrada de Reset para el restablecimiento de cualquier evento de seguridad en la sección de navajas de la máquina.
- Se seleccionó la salida 03 del Modulo 2 del Plug-In (P2_03) como indicador de funcionamiento de la máquina sin fallas, relevante para el “Start” y el “Stop” de control como lo veremos más adelante.
intelligent-safety-using-the-m100-control-starter_S7P11.png
Por último, vamos a agregar algunos elementos de salida como “Status_Out” para obtener ciertos diagnósticos de los elementos de seguridad que está controlando el CR30. Quedando así la Lógica de Seguridad final del CR30:
El diagnóstico en importante en los proyectos de Industria 4.0 para hacer más productiva la máquina, es por lo que estamos demostrando que los equipos de vanguardia tienen esta capacidad y es momento de explotarla. En este ejemplo estamos haciendo el diagnóstico de la manera tradicional, pero también se puede hacer por red Ethernet, solo hay que seleccionar las señales que necesitemos para enviarlos a un sistema SCADA o analítico.
Note que hemos utilizado más señales indicadoras:
- Indicación de Puerta Abierta parpadeante en la Salida 00 del Modulo 2 del Plug-in (P2_00)
- Indicación de Cortina Activa parpadeante en la Salida 01 del Módulo 2 del Plug-in (P2_01)
- Indicación del Paro de Emergencia Activo parpadeante en la salida 02 del Modulo 2 del Plug-in (P2_02)
- Indicación de falla del M100S parpadeante en la salida 20. (EO_20), con su respectiva entrada en 03 del Modulo 2 del Plug-in (P2_03) que se alambrara directamente de la salida del M100S.
- Todo esto se reflejará en los diagramas eléctricos del proyecto en el siguiente paso.
Con esto hemos concluido el programa de Seguridad de nuestro punto de acceso A01 – Cambio de Navajas de acuerdo con el análisis de riesgo hecho en RASWin.
intelligent-safety-using-the-m100-control-starter_S7P12.png
Por lo tanto, nuestra implementación con los productos antes seleccionados quedaría como sigue:
intelligent-safety-using-the-m100-control-starter_S6P3.png
Generación de Diagrama Eléctrico de Control de Seguridad.
En esta sección detallaremos el cableado entre los distintos elementos que integran las funciones de seguridad:
intelligent-safety-using-the-m100-control-starter_S8P1.png
Considerando la asignación de señales del CR30 y de M100S, generaremos los diagramas de alambrado de acuerdo con el código de seguridad anterior.
intelligent-safety-using-the-m100-control-starter_S8P2.png
Diagrama Eléctrico de Control de Seguridad:
intelligent-safety-using-the-m100-control-starter_S8P3.png
Diagrama Eléctrico de Indicadores de Diagnóstico:
intelligent-safety-using-the-m100-control-starter_S8P4.png
Con esto, terminamos el diseño del control de seguridad funcional del punto de acceso “Cambio de Navajas” para mantener seguro al personal que tiene que realizar esa actividad continuamente.
intelligent-safety-using-the-m100-control-starter_S8P5.png
intelligent-safety-using-the-m100-control-starter_S1P1.jpg
intelligent-safety-using-the-m100-control-starter_S1P2.png
intelligent-safety-using-the-m100-control-starter_S1P3.png
intelligent-safety-using-the-m100-control-starter_S1P4.png
intelligent-safety-using-the-m100-control-starter_S2P1.png
intelligent-safety-using-the-m100-control-starter_S2.1P1.png
intelligent-safety-using-the-m100-control-starter_S2.2P1.png
intelligent-safety-using-the-m100-control-starter_S2.2P2.png
intelligent-safety-using-the-m100-control-starter_S2.2P3.png
intelligent-safety-using-the-m100-control-starter_S2.3P1.png
intelligent-safety-using-the-m100-control-starter_S2.3P2.png
intelligent-safety-using-the-m100-control-starter_S3P2.png
intelligent-safety-using-the-m100-control-starter_S3P2.png
intelligent-safety-using-the-m100-control-starter_S3P3.png
intelligent-safety-using-the-m100-control-starter_S3P4.png
intelligent-safety-using-the-m100-control-starter_S3P5.png
intelligent-safety-using-the-m100-control-starter_S3P6.png
intelligent-safety-using-the-m100-control-starter_S3P7.png
intelligent-safety-using-the-m100-control-starter_S3P8.png
intelligent-safety-using-the-m100-control-starter_S3P9.png
intelligent-safety-using-the-m100-control-starter_S3P10.png
intelligent-safety-using-the-m100-control-starter_S3P11.png
intelligent-safety-using-the-m100-control-starter_S3P12.png
intelligent-safety-using-the-m100-control-starter_S3P13.png
intelligent-safety-using-the-m100-control-starter_S4.1P1.png
intelligent-safety-using-the-m100-control-starter_S4.1P2.png
intelligent-safety-using-the-m100-control-starter_S4.1P3.png
intelligent-safety-using-the-m100-control-starter_S4.1P4.png
intelligent-safety-using-the-m100-control-starter_S4.1P5.png
intelligent-safety-using-the-m100-control-starter_S4.2P1.png
intelligent-safety-using-the-m100-control-starter_S4.2P2.png
intelligent-safety-using-the-m100-control-starter_S4.2P3.png
intelligent-safety-using-the-m100-control-starter_S4.2P4.png
intelligent-safety-using-the-m100-control-starter_S4.2P5.png
intelligent-safety-using-the-m100-control-starter_S4.2P6.png
intelligent-safety-using-the-m100-control-starter_S5P1.png
intelligent-safety-using-the-m100-control-starter_S5P2.png
intelligent-safety-using-the-m100-control-starter_S5P3.png
intelligent-safety-using-the-m100-control-starter_S5P4.png
intelligent-safety-using-the-m100-control-starter_S5P5.png
intelligent-safety-using-the-m100-control-starter_S5P6.png
intelligent-safety-using-the-m100-control-starter_S5P7.png
intelligent-safety-using-the-m100-control-starter_S5P8.png
intelligent-safety-using-the-m100-control-starter_S5P9.png
intelligent-safety-using-the-m100-control-starter_S6P1.png
intelligent-safety-using-the-m100-control-starter_S6P2.png
intelligent-safety-using-the-m100-control-starter_S6P3.png
intelligent-safety-using-the-m100-control-starter_S8P1.png
intelligent-safety-using-the-m100-control-starter_S8P2.png
intelligent-safety-using-the-m100-control-starter_S8P3.png
intelligent-safety-using-the-m100-control-starter_S8P4.png
intelligent-safety-using-the-m100-control-starter_S8P5.png
intelligent-safety-using-the-m100-control-starter_S7P1.png
rotary-knife_Step6-2.png
rotary-knife_Step6-2.png
rotary-knife_Step6-2.png
rotary-knife_Step6-2.png
rotary-knife_Step6-2.png
rotary-knife_Step6-2.png
rotary-knife_Step6-2.png
rotary-knife_Step6-2.png
rotary-knife_Step6-2.png
rotary-knife_Step6-2.png
rotary-knife_Step6-2.png
Control de Seguridad con Arrancador M100
Versión 1.2 - Mayo de 2026