Downloads

Nesta página:
Qual é a finalidade disso?
O Smartbelt é um sistema transportador através de esteiras inteligentes. Buscando organizar uma fila de produtos que vem de forma desordenada, para uma posição ordenada. O sistema é comum para utilização no controle de posicionamento de esteiras de Taliscas (Flight Conveyor). A correção pode ser feita por uma ou mais esteiras, conforme a dinâmica necessária. A aplicação utiliza recursos de AOI que realiza a correção baseada no tamanho da Esteira, sensores de registro para verificar posição atual do movimento do Servodrive, tamanho do produto na esteira, distância de correção até o alvo. Dessa forma, cada esteira realiza um controle de movimento independente.
O recurso Smartbelt é destinado a fabricantes OEM, que utilizam de mecanismos de movimento para entrega de cargas que utilizam esteiras do tipo de taliscas com separação de produtos:
- Encaixotadoras
- Empacotadoras
- Máquinas especiais
Recursos gerais
Sistema flexível que através de poucos parâmetros pode alterar entre diferentes tamanhos de produto:
- Add-on instruction para cálculo de correção de posição.
- Regime de trabalho de seguidor x mestre para posição alvo de 0 a 360 graus.
- Utilização de Eixo Virtual como principal para os eixos seguidores.
- Utilização da biblioteca Machine Builder Library como referência para controle de movimento via Axis Handler.
Limitações/desvantagens
- Para posicionamento em esteiras perpendiculares, a correção de cada esteira não deve ser superior ao gap entre produtos, evitando colisão de produtos.
- Velocidades altas dependem da mecânica disponível para o movimento correto.
- Janela de entrega do produto pequena.
Como posso fazer isso funcionar?
A arquitetura implica o uso de hardware Compactlogix ou Contrologix com recurso de CIP Motion e CIP Sync, além da utilização de ServoDrives das famílias Kinetix 5300, 5500 ou 5700. Neste programa está sendo utilizado K5500.
E este é o software necessário:
- Logix Design Studio 5000
- Revisão de Firmware 33 ou superior.
- Programa SmartBelt.ACD
- Blocos de funções definidos pelo usuário:
- AOI_CalcCorrectionDistance
- FactoryTalk View Studio V13.0
- Programa SmartBelt.MER
Conhecimentos necessários:
Recomendamos ter uma compreensão intermediária da programação da lógica ladder no software Logix Design Studio 5000 e da configuração do sistema de Motion Control. Além de conhecimentos básicos na aplicação de FactoryTalk View ME para ajustar a aplicação de IHM para restaurar e rodar.
Observação: você precisará concordar com os Termos e Condições de cada download.
Precisa de ajuda?
Se você precisar de ajuda com uma inscrição ou tiver um feedback do centro de inovação, escreva para nós.
Guia de instalação
Passo 1
- Abrir o programa SmartBelt.ACD – O arquivo está localizado dentro da pasta Generalfiles.zip na área de Download.
- Realizar Download em ambiente virtual (Logix Echo – opcional) ou físico em controlador Logix.
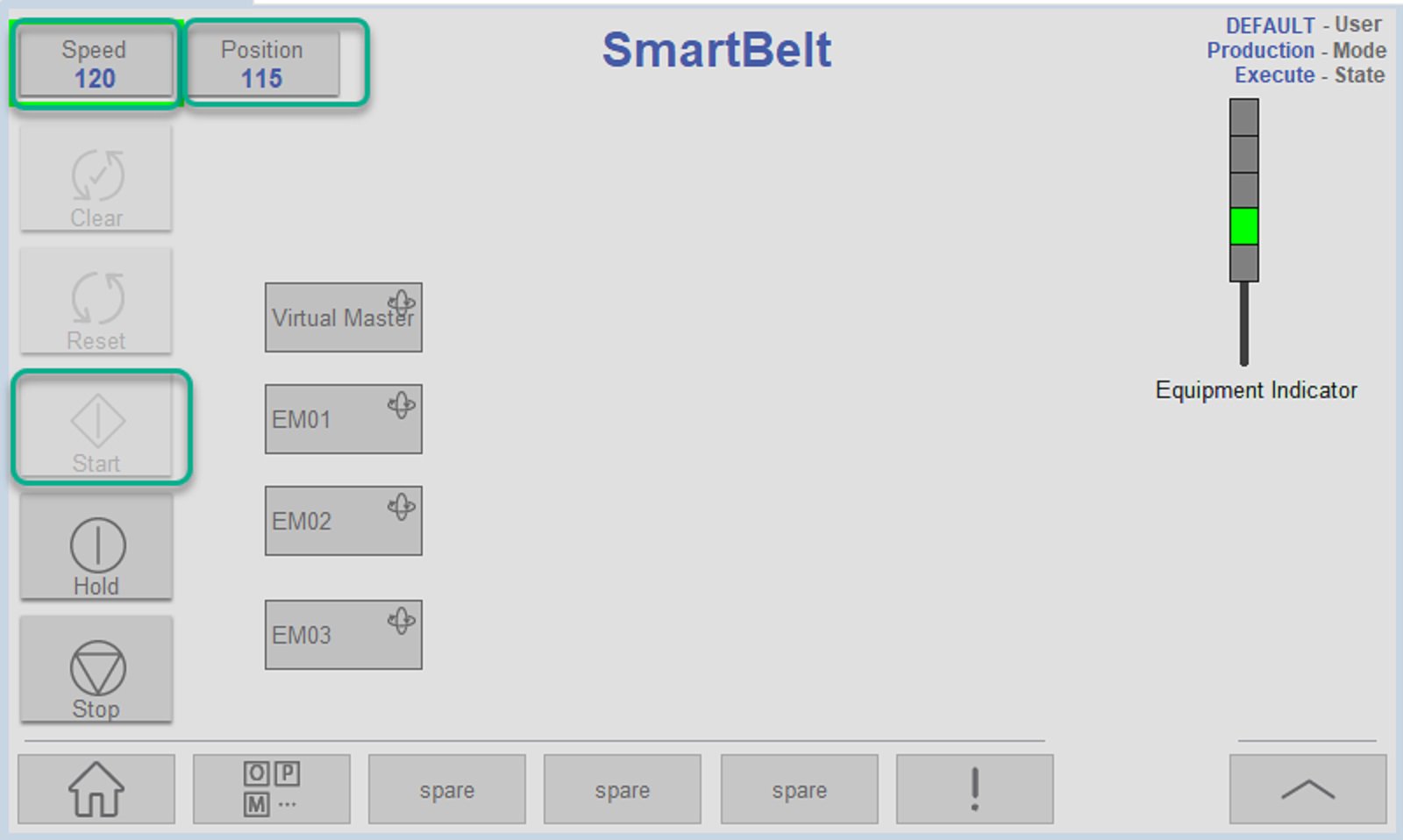
- Restaurar o arquivo de IHM para utilizar em modo simulação ou físico como runtime.
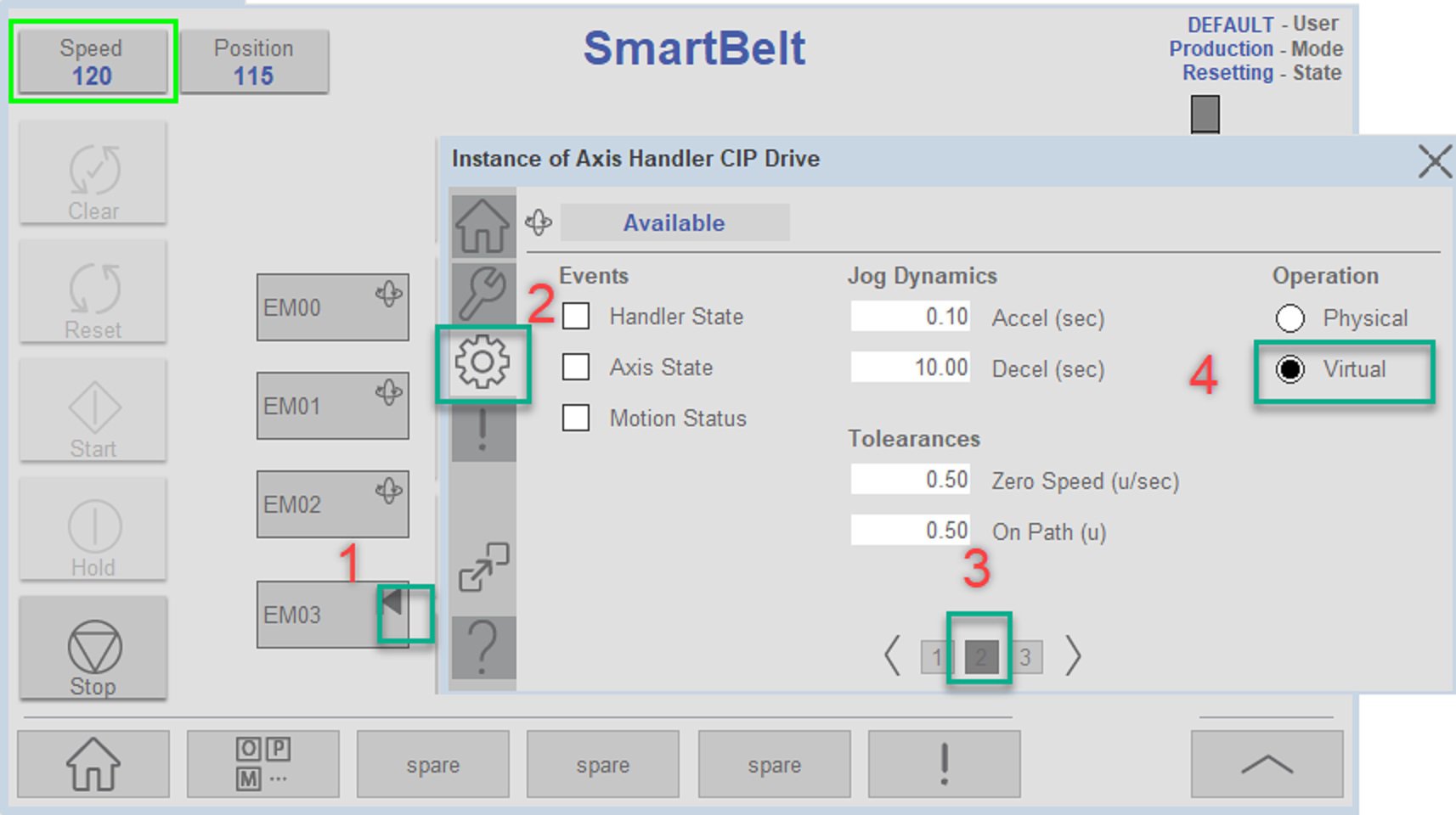
- Inicialmente, pode-se utilizar o programa com Eixo Virtual, habilitando essa opção para os Drives Kinetix existentes via faceplate do IHM.
Passo 2
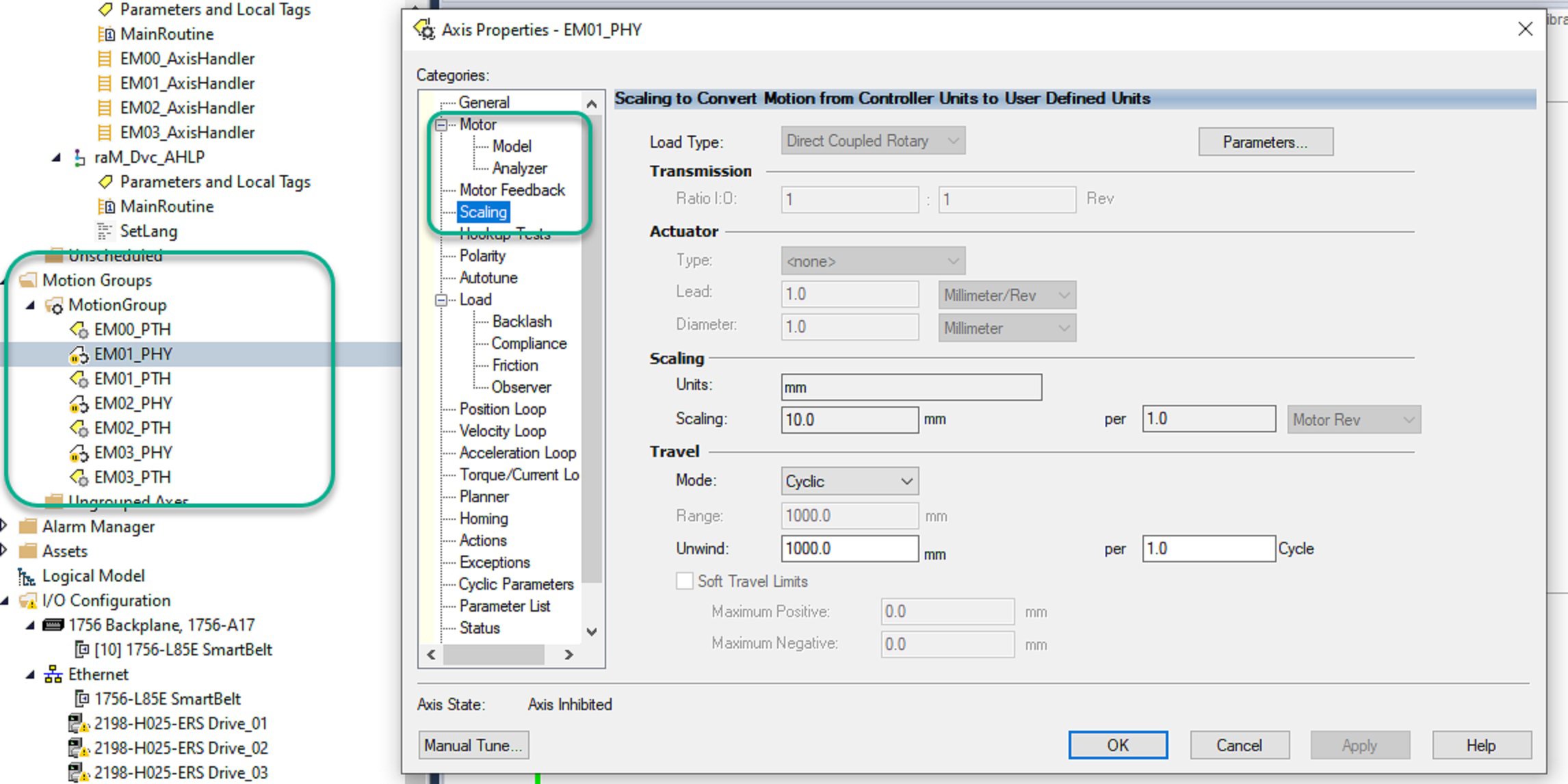
Verificar as configurações físicas dos eixos, alterando conforme a necessidade do projeto:
a. EM00 – Virtual Master Axis
b. EM01PHY – Eixo da Primeira Esteira
c. EM02PHY- Eixo da Segunda Esteira
d. EM03PHY – Eixo da Terceira Esteira
Passo 3
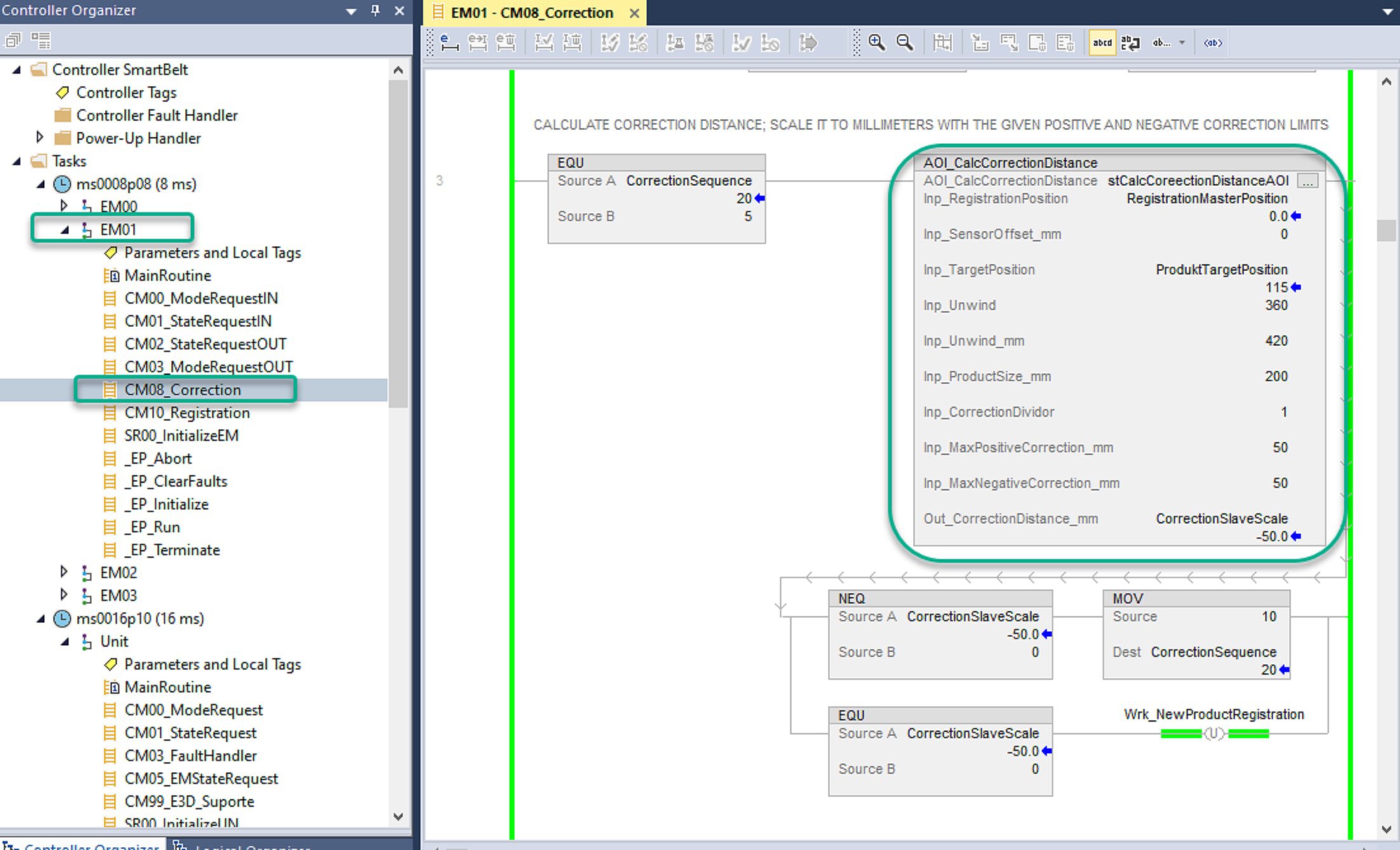
Nos programas de EM01 até EM03, nas rotinas CM08_Correction, ajustar no AOI as respectivas medidas conforme a necessidade do projeto:
e. Inp_Unwind – Ciclo de uma volta em graus do Mestre EM00 – Padrão 360.
f. Inp_Unwind_mm – Comprimento da esteira em milímetros.
g. Inp_ProductSize_mm – Comprimento do produto em milímetros a ser corrigido na esteira.
h. Inp_MaxPositiveCorrection_mm – Valor máximo de correção positiva por cada esteira.
i. Inp_MaxNegativeCorrection_mm – Valor máximo de correção negativa por cada esteira.
Passo 4
- Dar Start na aplicação Factory Talk View para iniciar os testes de movimento. Poderá ser alterado a velocidade de produtos por minuto. Sempre respeitando a frequência que os produtos são liberados que deverá ser menor que a frequência de pacotes por minuto solicitada. Evitando sobrecarga na esteira e congestionamento de produtos para correção.
- O sistema deverá comportar no máximo um produto por esteira, evitando assim erro na correção. Verificar no material de apoio apresentação do projeto.
- O Set point de position é o alvo da Talisca (Flight Conveyor) desejado em graus (Exemplo 115 graus).
- Para usar o Emulate 3D para simular a aplicação, deverá ser habilitado o uso de Class 1 MSG para funcionamento do Point IO como remota e sensores de teste do Emulate 3D.