Este aplicativo serve como exemplo de como usar a biblioteca raM_Tec_RotaryKnife.
Este AOI calcula quatro perfis CAM para a lâmina rotativa:
Came de conexão para aceleração a partir de uma posição estacionária. Normalmente a partir da posição inicial do eixo após homing ou quando não há produto/saco em produção.
Came cíclico para movimento contínuo: um corte por comprimento do produto.
Came de desconexão para desaceleração ao parar a lâmina sem parar o eixo mestre.
Came de pausa para manter o eixo escravo parado por um comprimento do produto.
Quando usar: Quando for necessário um perfil CAM de lâmina rotativa para um eixo.
Quando NÃO usar: Não aplicável (NA).
Descrição funcional
A instrução de cálculo do came gera perfis para sincronizar a velocidade da lâmina com o transportador enquanto estão em contato.
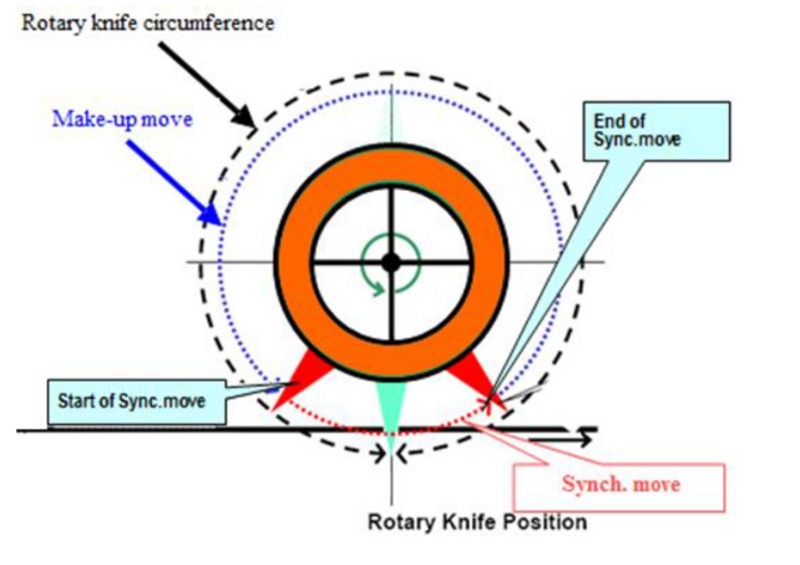
Durante a operação cíclica de uma lâmina rotativa, há uma porção sincronizada e uma porção de compensação (veja a imagem abaixo). A porção sincronizada garante que as velocidades da lâmina e do transportador sejam iguais, enquanto o movimento de compensação permite que os comprimentos de corte sejam mais curtos ou mais longos que a circunferência do rolo da lâmina, acelerando ou desacelerando.
Downloads
Observe que: Você precisará concordar com os Termos & Conditions para cada download.
Se precisar de ajuda com uma aplicação ou tiver feedback do Centro de Inovação, por favor, entre em contato conosco.
Movimento de compensação ou movimento de ajuste:Movimento da faca onde não há contato entre a faca e o transportador (velocidades não sincronizadas).
Existem dois perfis de interpolação possíveis para o movimento de compensação:
A prioridade de interpolação é o uso mínimo de energia e a velocidade máxima; isso pode resultar em um perfil de aceleração não contínuo, embora os perfis de velocidade e posição sejam contínuos.
A prioridade de interpolação é a suavidade do movimento (perfis contínuos de posição, velocidade e aceleração); isso pode resultar em uma velocidade máxima mais alta e pode fazer com que a faca reverta a direção para parâmetros que não reverteriam quando o modo de velocidade máxima/uso mínimo de energia é selecionado.
Movimento sincronizado:Movimento da faca onde a faca e o transportador estão em contato (velocidades sincronizadas).
Existem dois perfis possíveis para o movimento sincronizado:
Perfil linear: calcula a velocidade angular da faca para corresponder à velocidade linear do transportador.
Compensação de arco seno: calcula o componente linear da velocidade angular em cada ponto de sincronização para manter exatamente a mesma velocidade linear entre a faca e o transportador.
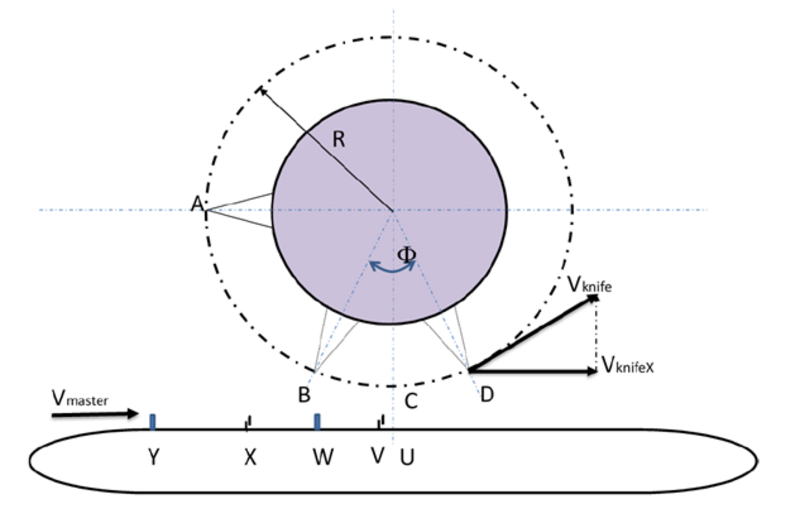
Figura 1. Posição da lâmina rotativa
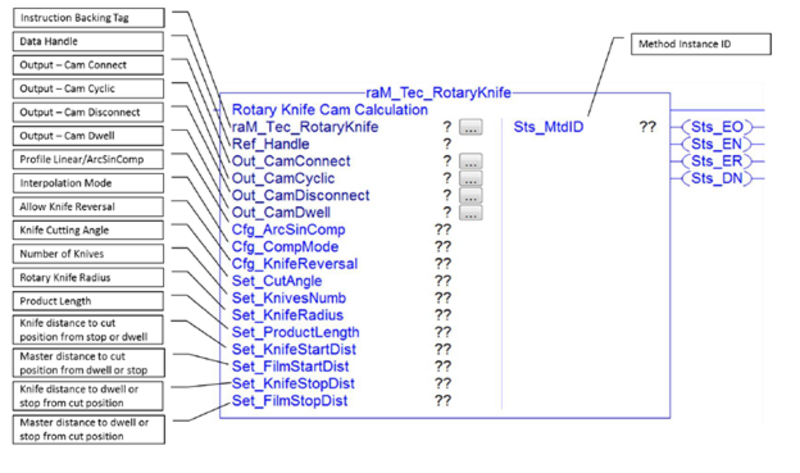
A instrução lâmina rotativa gera quatro perfis CAM (CAM) com base em entradas configuráveis pelo usuário.
Came de conexão: Use este perfil CAM quando o mestre estiver em movimento e a lâmina estiver parada. O perfil de conexão acelera a lâmina da velocidade zero até a velocidade de sincronização, com uma distância definida entre o mestre e o escravo, minimizando o estresse mecânico. O came de conexão começa na posição inicial da lâmina e termina no início da distância de sincronização. A distância do came de conexão mais a distância do came de desconexão resulta em um ciclo completo (distância do came cíclico). Isso se aplica a ambas as distâncias, mestre e escravo.
Came cíclico:Use este perfil CAM como o ciclo contínuo da lâmina (um produto). Ele contém o movimento sincronizado (definido por Set_CutAngle em graus) e o movimento de compensação (definido por Set_ProductLength e Set_KnivesNumb).
Came de desconexão: Use este perfil CAM quando for necessário comandar a lâmina a parar enquanto o mestre continua se movendo. O perfil de desconexão desacelera a lâmina até a velocidade zero com uma distância definida entre o mestre e o escravo, minimizando o estresse mecânico. O came de desconexão contém o perfil de sincronização e o perfil de movimento da velocidade de sincronização até zero, considerando a distância definida entre o mestre e o escravo. A distância do came de conexão mais a distância do came de desconexão resulta em um ciclo completo (distância do came cíclico). Isso se aplica a ambas as distâncias, mestre e escravo.
Came de permanência: Use este perfil CAM para manter o eixo escravo parado por uma distância mestre (Set_ProductLength).
Set_CutAngle - Ângulo de corte no qual o mestre e o escravo se movem de forma sincronizada; o valor está em graus (como todo o escravo também deve ser dimensionado em graus). Este valor define a distância que o mestre deve percorrer (X a V).
Set_KnivesNumb - Número de facas. O número de facas define a distância do ciclo completo (por exemplo, 1 faca = 360 °, 2 facas = 180 °, 3 facas = 120 °, etc.).
Set_KnifeRadius - Raio da faca. As unidades do raio devem corresponder às unidades do mestre (portanto, se as distâncias do mestre estiverem em mm, deve ser definido em mm; se em polegadas, o raio deve estar em polegadas).
Set_ProductLength - Distância do mestre entre dois cortes (Y a W), definida em unidades do mestre.
Set_KnifeStartDist - Distância (A a C, em graus) da posição inicial do escravo até o primeiro corte (ou seja, após homing ou dwell). A distância é definida até a posição de corte, que permanece constante e independente das mudanças no ângulo de corte (metade da distância de corte é automaticamente subtraída dentro da AOI ao calcular o came de conexão, já que este came não inclui o movimento de sincronização, distância de A a B).
Set_FilmStartDist - Distância do mestre (U a W em unidades do mestre) para o came de conexão. Esta é a distância do material até a próxima posição de corte ao iniciar após homing ou sair do dwell (normalmente metade do comprimento do produto).
Set_KnifeStopDist - Distância do escravo da posição de corte de volta à posição inicial (C a A; o próprio came corresponde a uma meia sincronização mais longa para alcançar a posição inicial, já que contém todo o perfil de sincronização).
Set_FilmStopDist - Distância do mestre para o came de desconexão da posição de corte de volta à posição inicial (ou seja, metade do comprimento do produto).
Cfg_ArcSinComp - Define o perfil de velocidade do movimento sincronizado. Se definido como 0, o perfil de velocidade é linear e a velocidade Vmaster corresponde à velocidade Vknife. Se definido como 1, a velocidade Vmaster corresponde à projeção de Vknife na direção de Vmaster (VknifeX), para uma sincronização mais precisa.
Cfg_CompMode - Define a interpolação do movimento de compensação.
Se definido como 0 (padrão), a interpolação prioriza o uso mínimo de energia e a velocidade máxima; isso pode resultar em um perfil de aceleração não contínuo (enquanto os perfis de velocidade e posição permanecem contínuos).
Se definido como 1, a interpolação prioriza o movimento suave (perfis contínuos de posição, velocidade e aceleração); isso pode resultar em uma velocidade máxima mais alta e pode fazer com que a faca inverta a direção em condições em que não inverteria no modo 0.
Cfg_KnifeReversal - Habilita a verificação de error para um came detectar se o perfil CAM calculado inclui um segmento onde a faca inverte a direção (isso pode ocorrer com combinações inadequadas de parâmetros de entrada, como alta velocidade de corte com comprimento longo do produto). Quando essa verificação de error está habilitada e o bit de error está ativo, os perfis CAM não serão calculados.
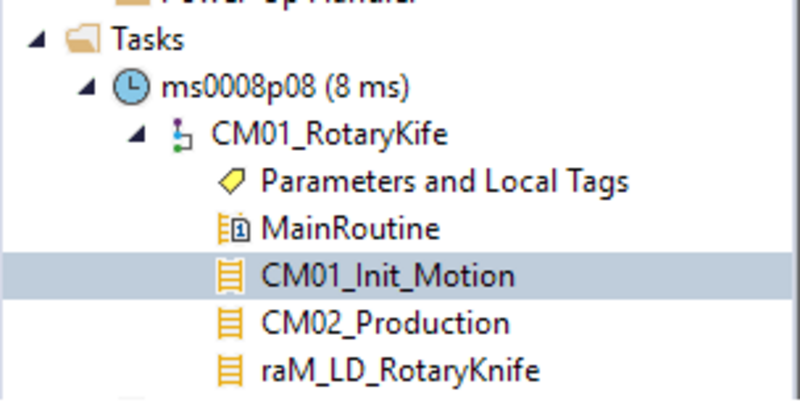
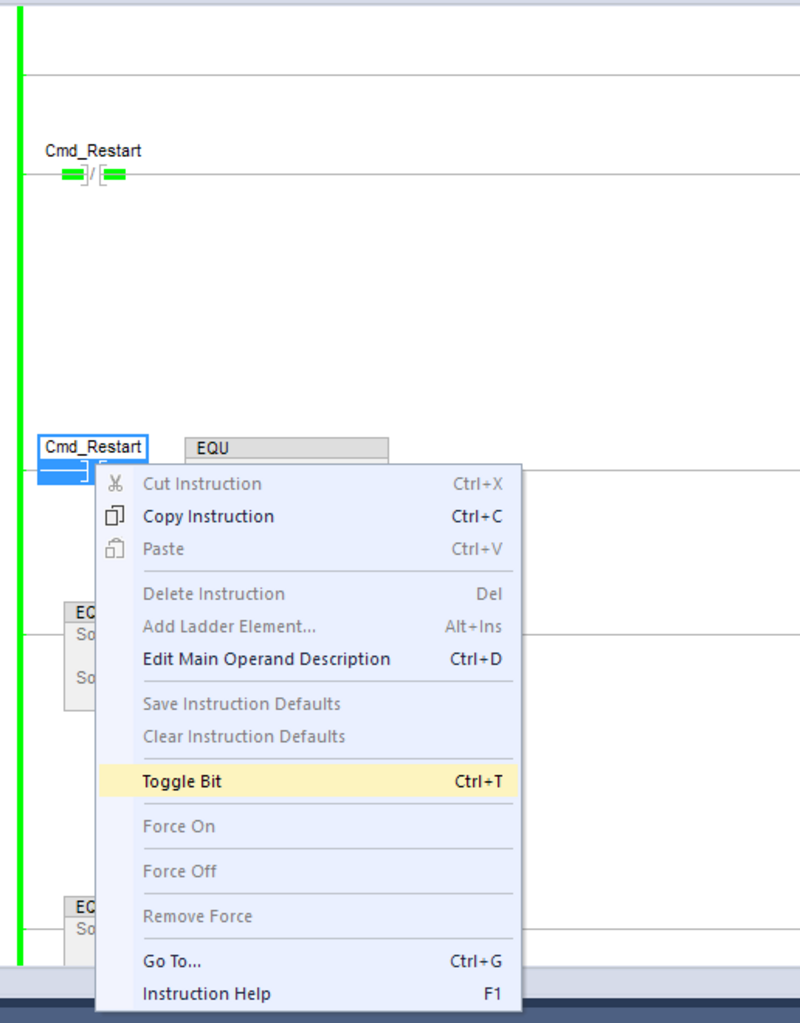
4.2 - No contato Cmd_Reset, clique com o botão direito e selecione Alternar Bit. Com esta instrução, você irá inicializar o servo motor, redefinir falhas e executar a rotina Home.
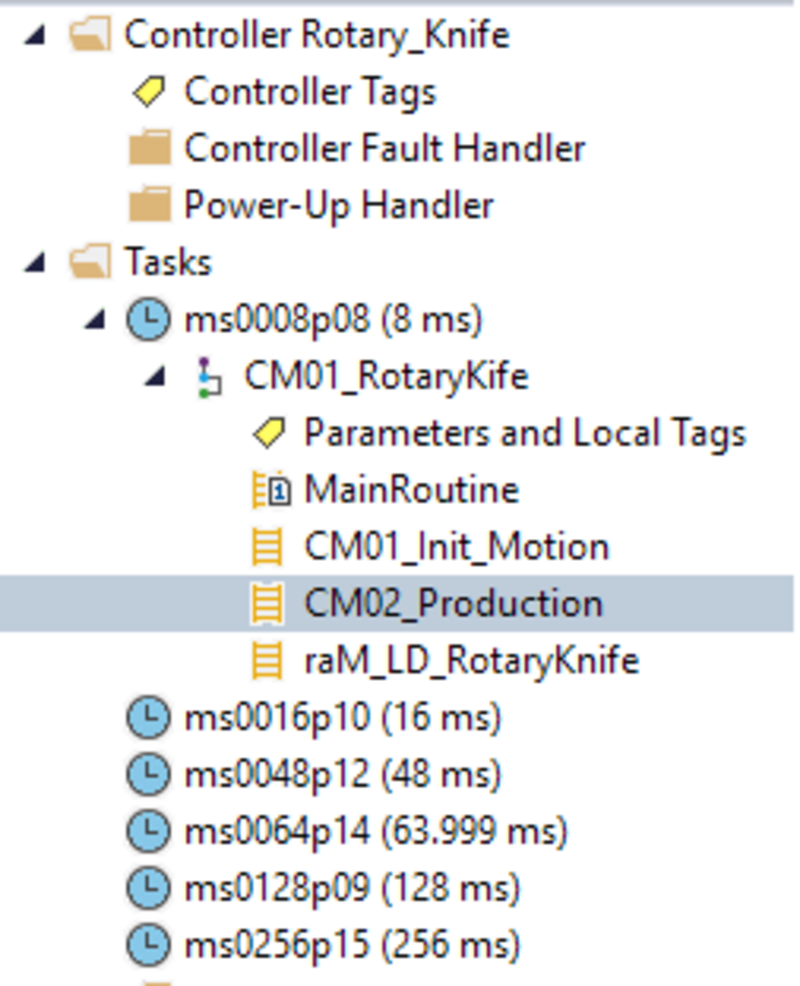
5.1 - Agora vá para a rotina Ram_LD_RotaryKnife e configure a AOI conforme seus requisitos.
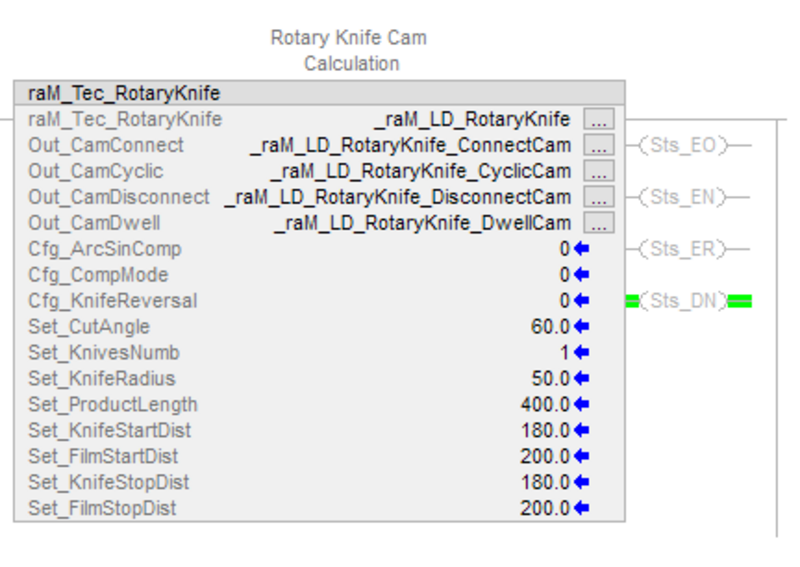
rotary-knife_Step5-1.png
Este é um exemplo de como configurar um came para uma lâmina rotativa na Add-On Instruction (AOI).
5.2 - Após o homing, a lâmina é posicionada 180° distante da posição de corte, e a posição do filme está 200 unidades distante do primeiro corte.
Há apenas uma lâmina nas mandíbulas.
O raio da lâmina nas mandíbulas é 50 mm.
Após o homing, a posição da lâmina está a 180° da posição de corte.
Após o homing, a posição do filme está no centro do produto.
O ângulo de corte é 60°.
O comprimento do produto é 400 mm.
Quando a lâmina para, ela deve parar exatamente na mesma posição que após o homing (para que possa começar a usar o came de conexão quando não houver produto/saco em operação).
O conteúdo deste site foi traduzido usando inteligência artificial (IA) sem revisão nem edição humana. O conteúdo pode conter erros ou imprecisões e é fornecido “da forma como está” sem nenhum tipo de garantia. O texto oficial é a versão em inglês.
Atualize suas preferências de cookies para continuar.
Este recurso requer cookies para melhorar sua experiência. Atualize suas preferências para permitir esses cookies:
Cookies de Redes Sociais
Cookies Funcionais
Cookies de Desempenho
Cookies de Marketing
Todos os Cookies
Você pode atualizar suas preferências a qualquer momento. Para mais informações, consulte nosso {0}
Política de Privacidade