Emulação do sistema de controle PID para variáveis industriais
A aplicação de um sistema de controle PID é uma ferramenta altamente útil para equipes de controle e automação industrial, permitindo testes críticos de variáveis, sistemas e processos-chave. - [Tempo de implementação: 60 minutos]
O objetivo deste aplicativo de emulação de sistema de controle PID é simular um sistema de primeira ordem no domínio de Laplace juntamente com um controlador PID, permitindo o teste e a análise do comportamento de uma variável a ser controlada dentro de uma planta.
O aplicativo foi desenvolvido no ambiente Studio 5000 Logix Designer usando a linguagem Function Block. Ele inclui a emulação de um sistema de primeira ordem no domínio de Laplace, seu controlador PID e um ambiente de distúrbio. Esses componentes são considerados os principais critérios para testar o controle de variáveis-chave em ambientes industriais.
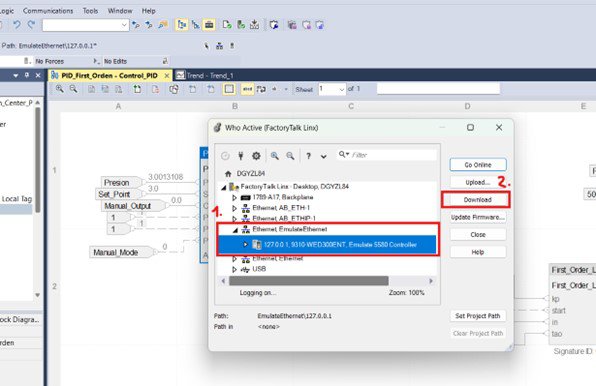
Este aplicativo oferece a opção de operar digitalmente via FactoryTalk Logix Echo ou, alternativamente, conectar-se a um PC/Laptop e baixar o programa para um controlador físico disponível para o usuário. Nesta primeira versão, o foco principal é a monitoração por meio dos gráficos gerados pela emulação, que exibem as variáveis de controle e de processo com as quais o usuário deseja trabalhar.
Isso é útil para mim?
Muitas variáveis industriais se comportam de maneira semelhante ao sistema modelado nesta aplicação: temperatura, pressão (usada na explicação e no exemplo), velocidade, nível etc. Modelar esses sistemas de primeira ordem é prático devido à sua simplicidade matemática (que facilita o projeto do controlador PID), tolerância de aproximação aceitável e facilidade de identificar parâmetros e coeficientes.
Esta aplicação se tornou uma ferramenta altamente útil para equipes de controle da planta e automação, integradores e outras partes interessadas em sistemas de controle industrial. Ela permite testes relevantes para determinar a melhor maneira de controlar variáveis-chave, como identificar quanto tempo leva para uma planta se estabilizar com base nas variáveis de cada processo. Tudo isso pode ser feito antes dos testes no local e do comissionamento do sistema.
Este tipo de aplicação é importante porque os usuários podem construí-la e ajustá-la para se tornar uma ferramenta prática de treinamento tecnológico para uso com suas próprias equipes e como um ambiente de teste para validações de conceitos técnicos que apoiam o desenvolvimento de projetos futuros.
Downloads
Observe que: Você precisará concordar com os Termos & Conditions para cada download.
O sistema pode ser testado com um controlador Rockwell conectado ao ambiente Studio 5000 de programação.
Conhecimento prático necessário
Habilidades básicas de programação e configuração no Studio 5000 Logix Designer e FactoryTalk Logix Echo, e compreensão da funcionalidade e parametrização do controlador Allen-Bradley.
Conhecimento teórico necessário
Sistemas de primeira ordem no domínio de Laplace
Um sistema típico de primeira ordem tem uma função de transferência da forma:
Esse tipo de sistema responde exponencialmente a uma entrada de degrau, sem oscilações e com uma única constante de tempo.
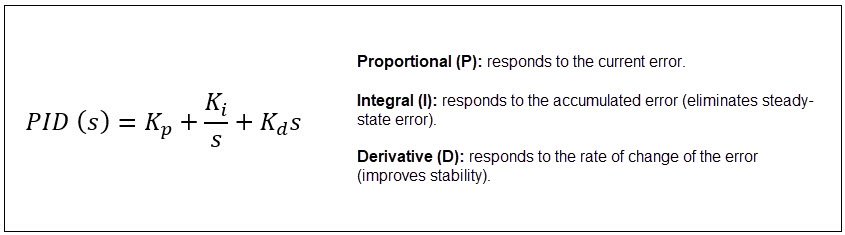
Controlador PID
O controlador PID consiste em três componentes:
Como o PID e o sistema de primeira ordem interagem
Quando um controlador PID é conectado a um sistema de primeira ordem, o objetivo é modificar a resposta do sistema para atender a critérios de desempenho específicos, como:
Tempo de resposta mais rápido
Overshoot reduzido
Eliminação do erro de regime permanente
A função de transferência de malha fechada torna-se:
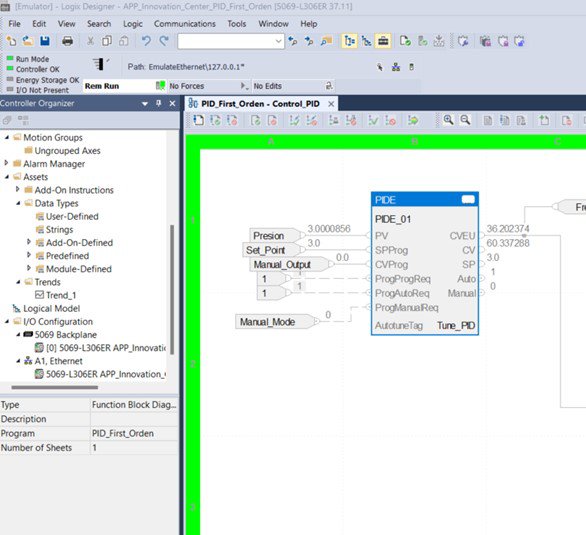
Etapa 3: Validar os blocos funcionais e entender seu uso
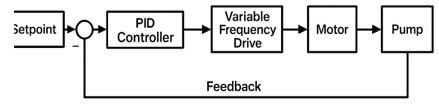
No exemplo atual, uma planta e seu sistema de controle são emulados. As duas principais variáveis de processo são:
Pressão – Variável de processo (por exemplo, gerenciada por meio de uma bomba) junto com um sistema de controle liderado pelo controlador Allen-Bradley (ControlLogix), além de outro dispositivo que funciona com base na próxima variável.
Frequência – Variável de controle (por exemplo, gerenciada por meio de um inversor de frequência – inversor de frequência)
Em resumo, o sistema controla uma bomba usando ajustes de frequência do inversor de frequência para estabilizar o nível de pressão.
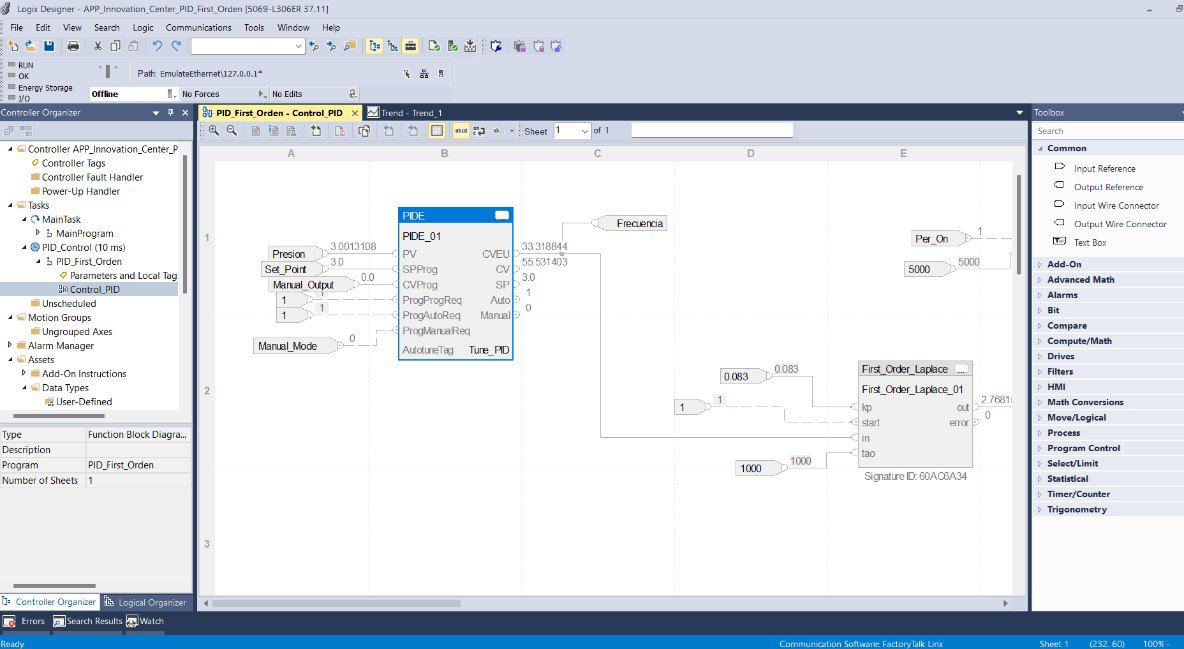
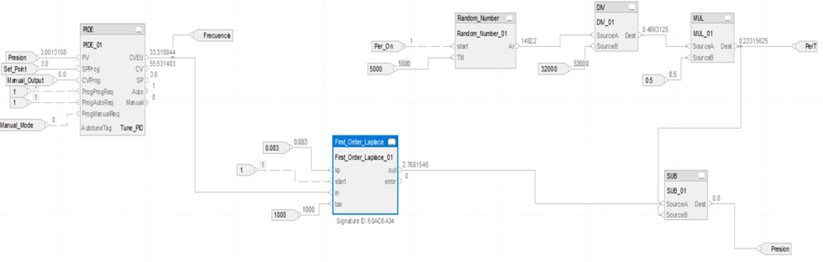
O sistema de programa consiste em três partes fundamentais:
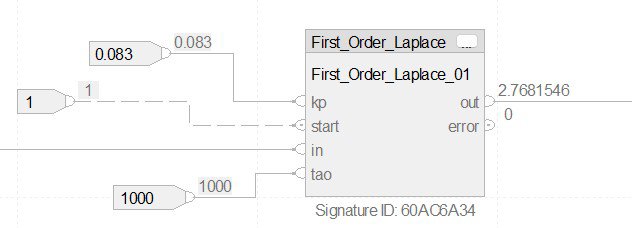
Este bloco simula o comportamento de um sistema linear de primeira ordem no domínio de Laplace, representando a variável de pressão. Ele segue a equação descrita anteriormente na documentação.
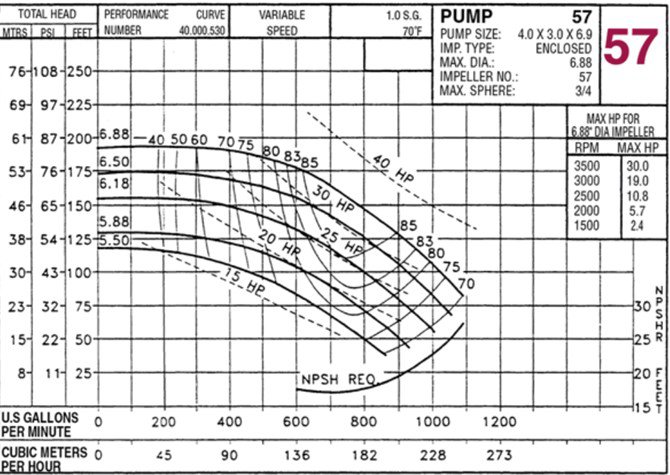
As variáveis mostradas no gráfico devem ser definidas neste bloco: o ganho estático do sistema (Kₚ) e a constante de tempo (τ) são baseados em valores estimados anteriormente.
Por exemplo, τ = 1000 ms corresponde ao tempo aproximado de estabilização do sistema de primeira ordem. Funcionalmente, podemos estimar o ganho estático do sistema:
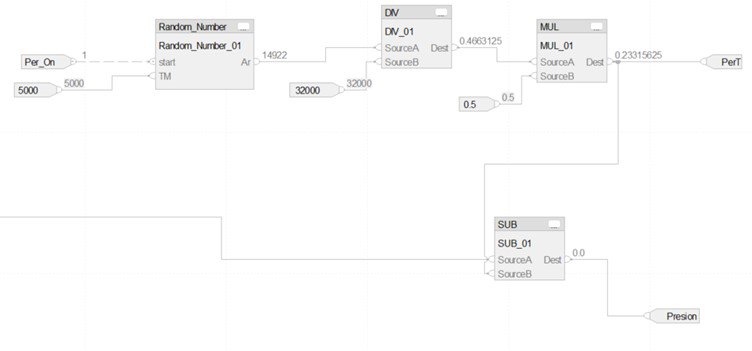
Este segmento inclui vários blocos de funções matemáticas para simular um ambiente perturbador.
No diagrama, quatro blocos são mostrados:
Número aleatório: Gera um valor aleatório de 0 a 32000 a cada 5 segundos, simulando distúrbios periódicos.
DIV e MUL: Convertem o valor aleatório em uma porcentagem e o dimensionam para o distúrbio máximo definido (por exemplo, 5 bar ou 0.5).
SUB (Subtrair): Representa o efeito do distúrbio na saída de pressão da bomba. A saída deste bloco torna-se o sinal de realimentação que fecha a malha e entra no controlador PID.
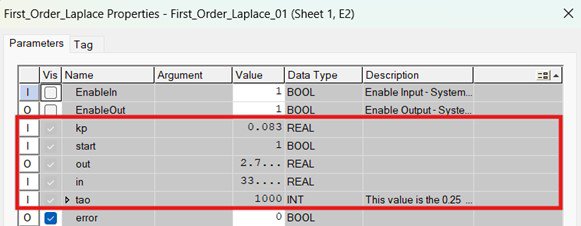
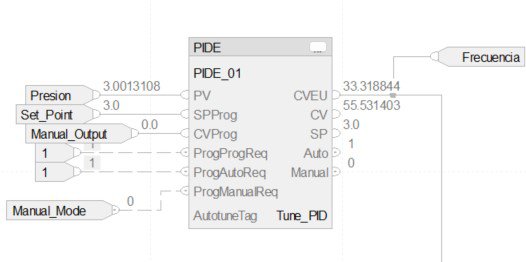
Na primeira vez que o bloco de controle PID é usado, é necessário realizar o processo de Autotune (este procedimento deve ser executado em Run Mode – controlador), pois é essencial para o cálculo dos ganhos do sistema (que não foram configurados anteriormente – na imagem eles foram desabilitados para fins de explicação) e de outros parâmetros do bloco de controle que operarão posteriormente no modo automático (ProgProgReq=1).
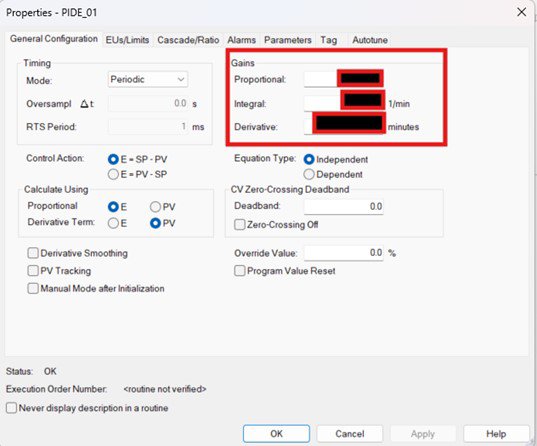
Para iniciar isso, acesse as propriedades do bloco (Properties – imagem anterior) e comece selecionando as configurações apropriadas de acordo com as condições específicas da aplicação
A primeira configuração relevante é o Timing Mode (1), que deve ser definido como periódico, conforme recomendado, devido à natureza da execução da tarefa. Em seguida, vem a Control Action (2); neste caso, como o comportamento de controle corresponde a uma ação direta, a primeira das duas opções disponíveis deve ser selecionada. Por fim, a última escolha diz respeito a como a variável de processo é calculada (3); a opção selecionada corresponde à configuração típica para esse tipo de sistemas integrais.
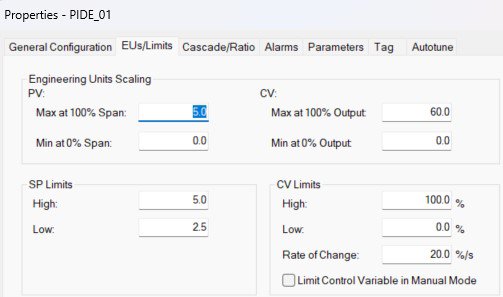
A próxima guia na janela Propriedades é EUs Limits, onde as faixas de operação das principais variáveis do sistema devem ser definidas: PV (Process Variable) – pressão em nosso caso, e CV (Control Variable) – frequência em nosso caso. De acordo com os parâmetros mencionados anteriormente na documentação, o valor máximo de pressão é definido como 5 bar, e o valor máximo de frequência é 60 Hz. Posteriormente, os limites para a variável de controle (CV) são configurados, e a taxa de mudança refere-se à porcentagem da saída do controlador segmentada de acordo com os intervalos de etapa definidos.
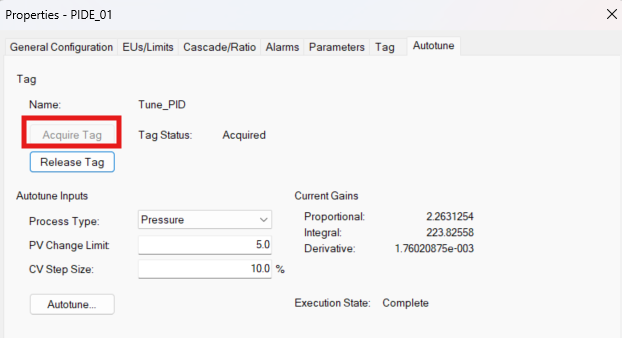
Por fim, para o processo de Autotune, navegamos até a guia com o mesmo nome, onde um Tag deve ser adquirido (isso é necessário ao realizar o processo pela primeira vez). Uma vez que o Tag é adquirido, prosseguimos para definir as entradas de Autotune, começando com o tipo de variável (Pressão), o limite máximo para a mudança da variável de processo e, por último, o tamanho dos incrementos de etapa da unidade que o processo de controle usará.
Para completar o cálculo do ganho, prosseguimos clicando no botão Autotune. É importante observar que o módulo PID deve estar em Manual Mode para que o Autotune seja executado corretamente. Após a conclusão, o módulo deve ser alternado para Auto Mode para iniciar a operação, que é controlada através do Tag Manual_Mode.
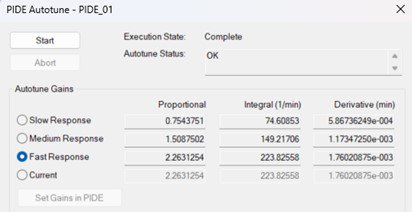
Para calcular os ganhos, basta pressionar o botão “Start”. O programa calculará os ganhos com base em três tipos de resposta (Lenta, Média, Rápida), dos quais um deve ser selecionado de acordo com os requisitos do sistema de controle. Esses ganhos são então aplicados ao sistema de controle usando o botão “Set Gains in PIDE”. A ideia é que, ao observar a resposta gráfica exibida no Studio 5000, o usuário possa identificar qual dos tipos de resposta de ganho calculados é mais adequado para o sistema emulado.
Se informações adicionais ou explicações funcionais forem necessárias para os blocos de programação usados no programa aplicativo, as respectivas seções de “Ajuda” para cada bloco podem ser consultadas, como a compartilhada na seção “Links de Interesse” desta documentação.
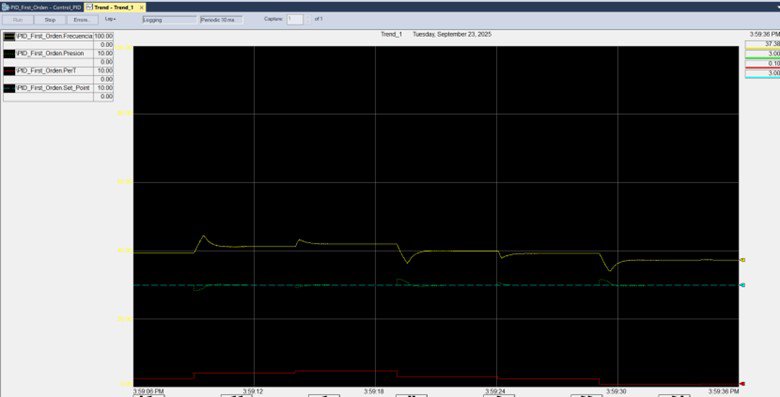
Como mencionado anteriormente, para realizar as alterações e ajustes finais (Autotune), o sistema deve estar operando no modo “Remote Run” dentro do Studio 5000. Uma vez definido isso, o sistema geral estará totalmente operacional, permitindo a verificação da resposta do sistema de controle para toda a estrutura que o compõe, incluindo distúrbios.
Ao executar o comando "Run", a resposta do sistema pode ser visualizada por meio de um gráfico que exibe as quatro curvas mais importantes: Amarela (frequência), Verde (pressão), Vermelha (distúrbios) e Azul (ponto de ajuste definido pelo controlador)
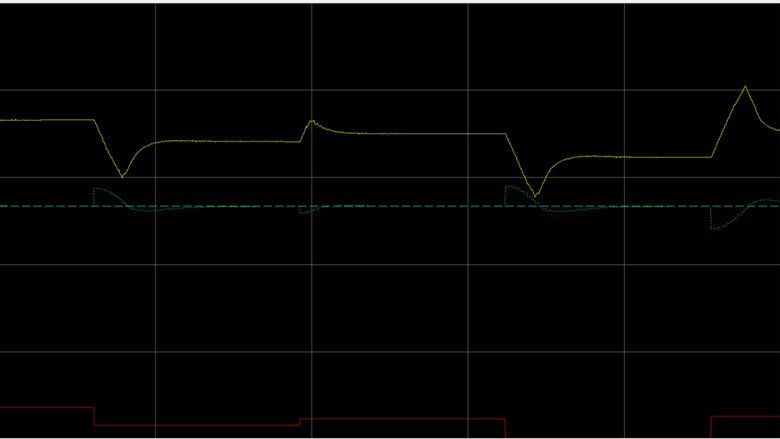
Essa representação gráfica permite identificar os principais comportamentos do sistema, possibilitando a emulação e análise do processo de controle e sua resposta a vários cenários que possam surgir. Isso é ideal para o propósito pretendido — criar cenários de teste antes da implementação na planta real, permitindo ajustes e melhorias potencialmente significativas. Na área destacada dentro da caixa laranja, o gráfico se concentra em um intervalo de tempo durante o qual o sistema sofre distúrbios. Ele mostra como o inversor de frequência ajusta a frequência para estabilizar o sistema e como a variável de processo, pressão, gradualmente se alinha ao alvo de controle (ponto de ajuste – curva azul). Ao longo do intervalo de tempo representado no gráfico, observam-se variações nos distúrbios e mudanças correspondentes em cada curva de resposta, incluindo ajustes, overshoots e outros comportamentos típicos de sistemas industriais com esse tipo de variável — comumente modelados como sistemas lineares de primeira ordem no domínio de Laplace.
É importante observar que o exemplo implementado no programa aplicativo foi projetado para emular um processo de controle envolvendo uma bomba, trabalhando em conjunto com um inversor de frequência e um motor como elementos de controle. No entanto, o programa aplicativo é estruturado de tal forma que, como explicado anteriormente, pode emular cenários envolvendo outras variáveis industriais que se comportam de maneira semelhante em sistemas de primeira ordem, como nível, temperatura, velocidade etc. Todos os ajustes necessários, dependendo da situação, podem ser aplicados dentro do bloco de controle PID, conforme detalhado em toda a documentação.
Emulação do sistema de controle PID para variáveis industriais
Versão 1.2 - Maio de 2026
Inscreva-se!
Receba novos lançamentos de aplicativos e outras atualizações do Innovation Center diretamente em sua caixa de entrada.
O conteúdo deste site foi traduzido usando inteligência artificial (IA) sem revisão nem edição humana. O conteúdo pode conter erros ou imprecisões e é fornecido “da forma como está” sem nenhum tipo de garantia. O texto oficial é a versão em inglês.
Atualize suas preferências de cookies para continuar.
Este recurso requer cookies para melhorar sua experiência. Atualize suas preferências para permitir esses cookies:
Cookies de Redes Sociais
Cookies Funcionais
Cookies de Desempenho
Cookies de Marketing
Todos os Cookies
Você pode atualizar suas preferências a qualquer momento. Para mais informações, consulte nosso {0}
Política de Privacidade