IPIDCONTROLLER (controlador derivativo–integral-proporcional)
Configurar e controlar as entradas e saídas usadas para a lógica proporcional-integral-derivada (PID). A lógica PID é usada para controlar propriedades físicas como temperatura, pressão, líquido, nível ou taxa de fluxo usando circuitos de processo que calculam um valor de erro como a diferença entre um ponto de ajuste desejado e uma variável de processo medida. O controlador tenta minimizar o erro ao longo do tempo ajustando uma variável de controle. O cálculo inclui termos proporcionais (P), integrais (I) e derivados (D), que são usados como segue:
- P: Valores presentes do erro.
- I: Valores anteriores do erro.
- D: Possíveis valores futuros do erro, com base em sua taxa atual de mudança que controla propriedades físicas, como temperatura, pressão, nível de líquido ou taxa de fluxo usando circuitos de processo.
Linguagens suportadas: Diagrama de blocos de função, diagrama de ladder, texto estruturado.
Essa instrução aplica-se aos controladores Micro810, L20E, L50E e L70E.
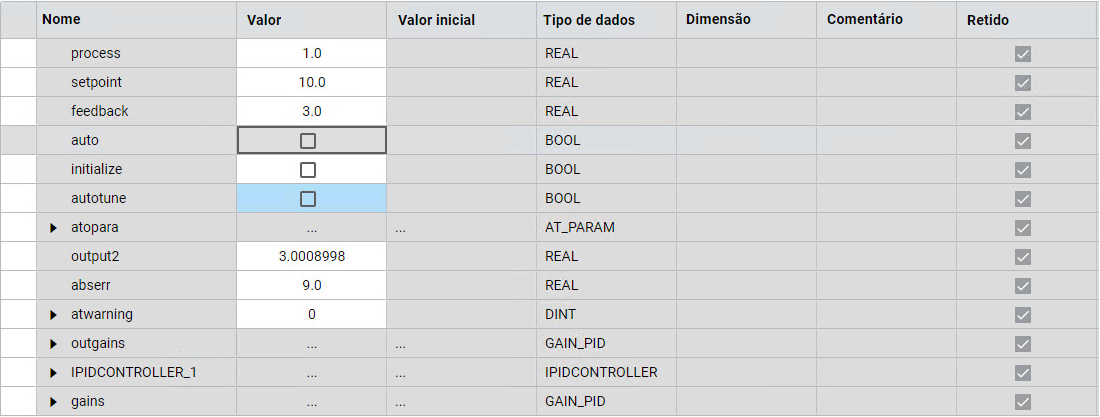
IPIDCONTROLLER
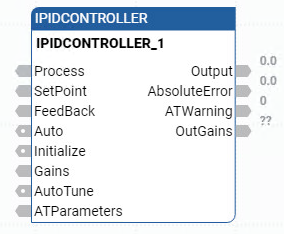
Parâmetro | Tipo do parâmetro | Tipo de dados | Descrição |
|---|---|---|---|
EN | Entrada | BOOL | Quando for TRUE, permite o bloco de instruções.
Aplica-se aos programas do diagrama de ladder. |
Process | Entrada | REAL | Valor do processo, que é o valor medido pela saída do processo. |
SetPoint | Entrada | REAL | Ponto de ajuste. |
FeedBack | Entrada | REAL | Sinal de feedback, que é o valor da variável de controle aplicada ao processo. Por exemplo, o feedback pode ser a saída IPIDCONTROLLER. |
Auto | Entrada | BOOL | O modo de operação do controlador PID:
|
Initialize | Entrada | BOOL | Uma mudança no valor (TRUE para FALSE ou FALSE para TRUE) faz com que o controlador elimine qualquer ganho proporcional durante esse ciclo. Também inicializa sequências de AutoTune. |
Gains | Entrada | GAIN_PID | PID de Ganhos para o IPIDController. Use o Tipo de dados GAIN_PID para definir os parâmetros para a entrada Ganhos. |
AutoTune | Entrada | BOOL |
|
ATParameters | Entrada | AT_Param | Parâmetros da regulagem automática. Use o Tipo de dados AT_Param para definir os parâmetros para a entrada ATParameters. |
Output | Saída | REAL | Valor de saída do controlador. |
AbsoluteError | Saída | REAL | Erro absoluto (Processo – Ponto de ajuste) do controlador. |
ATWarnings | Saída | DINT | (ATWarning) Aviso para a sequência de regulagem automática. Os valores possíveis são:
|
OutGains | Saída | GAIN_PID | Ganhos calculados após as sequências de regulagem automática. Use o tipo de dado GAIN_PID para definir a saída OutGains. |
ENO | Saída | BOOL | Ativar saída. Aplica-se aos programas do diagrama de ladder. |
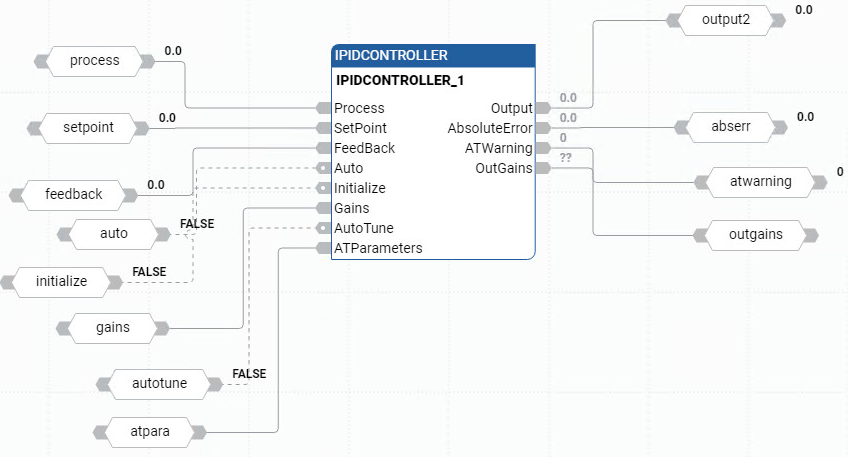
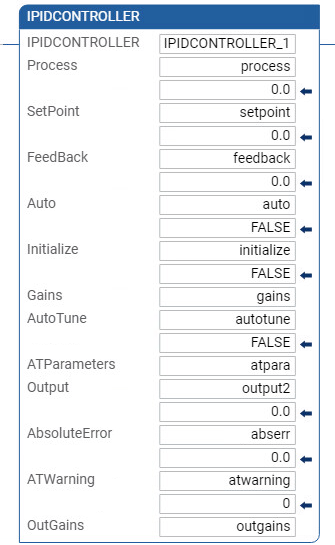
Exemplos de IPIDCONTROLLER
Exemplo de diagrama de blocos de função IPIDCONTROLLER
Exemplo de diagrama de ladder IPIDCONTROLLER
Exemplo de texto estruturado IPIDCONTROLLER
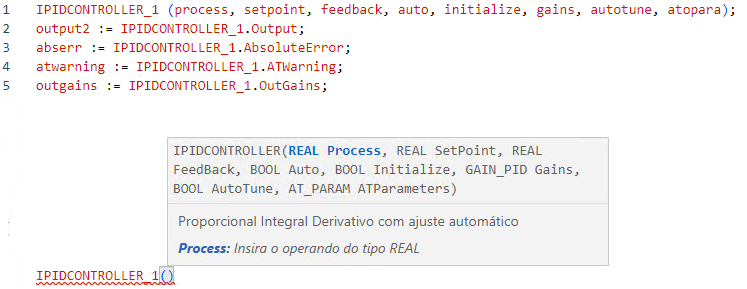
(* ST equivalence: IPIDController1 is an instance of IPIDController block *) IPIDController1(Proc, SP, FBK, Auto, Init, G_In, A_Tune, A_TunePar, Err ); Out_process := IPIDController1.Output ; A_Tune_Warn := IPIDController1.ATWarning ; Gain_Out := IPIDController1.OutGains ;
Resultados
Dê sua opinião