MC_Stop (parada do controle de movimento)
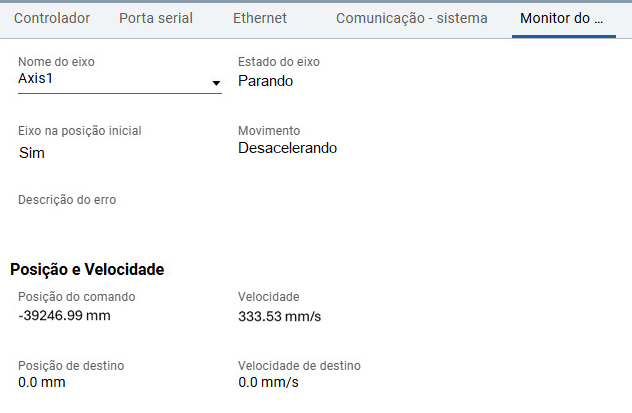
A instrução MC_Stop comanda uma parada de movimento controlada e altera o estado do eixo para Parando. Qualquer execução do bloco de função em andamento é cancelada. Todos os comandos de movimento do bloco de função são ignorados até que o estado do eixo mude para Suspenso.
Detalhes da operação:
- Enquanto a entrada Executar estiver alta, o eixo permanece no estado Parando. Enquanto o eixo estiver no estado Parando, nenhum outro bloco da função de movimento poderá realizar qualquer movimento no mesmo eixo.
- Se a Desaceleração for igual a zero, os parâmetros da MC_Stop são determinados pela configuração da Parada de emergência da configuração do eixo, incluindo tipo Parada de Emergência, Desaceleração da Parada de Emergência e Jerk da Parada de Emergência.
- Quando nenhum erro for detectado durante a sequência de parada, o estado do eixo mudará para Suspenso após o bit Concluído ser DEFINIDO e a entrada Execute mudar para Falso.
- Use MC_Stop para situações de funcionalidade ou exceção de parada de emergência. Use MC_Halt para paradas de movimento normais.
Linguagens suportadas: Diagrama de blocos de função, diagrama de ladder, texto estruturado.
Essa instrução aplica-se aos controladores L50E e L70E que suportam o controle de movimento.
MC_Stop
Parâmetro | Tipo do parâmetro | Tipo de dados | Descrição |
|---|---|---|---|
EN | Entrada | BOOL | Habilitação do bloco de instruções.
Aplica-se apenas aos programas do diagrama de ladder. |
AxisIn | Entrada | AXIS_REF | Use o tipo de dado AXIS_REF para definir os parâmetros para AxisIn. |
Execute | Entrada | BOOL |
|
Deceleration | Entrada | REAL | Valor da desaceleração [u/s 2 ]. |
Jerk | Entrada | REAL | Valor do arremesso [u/s 3 ]. |
ENO | Saída | BOOL | Ativar saída. Aplica-se apenas aos programas do diagrama de ladder. |
Axis | Saída | A saída do eixo é somente leitura em programas do diagrama de ladder. | |
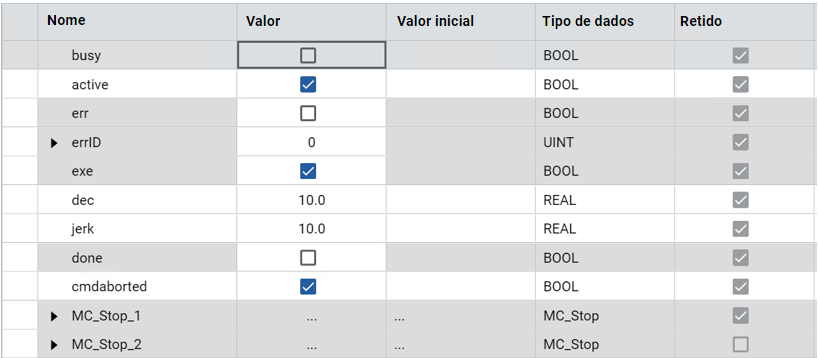
Done | Saída | BOOL | TRUE: A velocidade zero foi atingida, sem erro durante a sequência de parada. |
Busy | Saída | BOOL | TRUE: O bloco de função não foi concluído. |
Active | Saída | BOOL | TRUE: Indica que o bloco de função tem controle sobre o eixo. |
CommandAborted | Saída | BOOL | TRUE: O comando foi substituído pelo bloco de função MC_Power(OFF) ou Parada de erro. |
Error | Saída | BOOL | Indica a ocorrência de um erro.
|
ErrorID | Saída | UINT | Um numérico exclusivo que identifica o erro. Os erros dessa instrução são definidos em IDs de erro do bloco da função de controle de movimento. |
Exemplos de MC_Stop
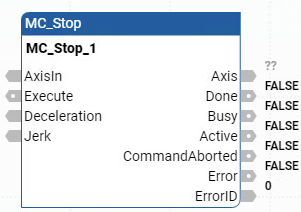
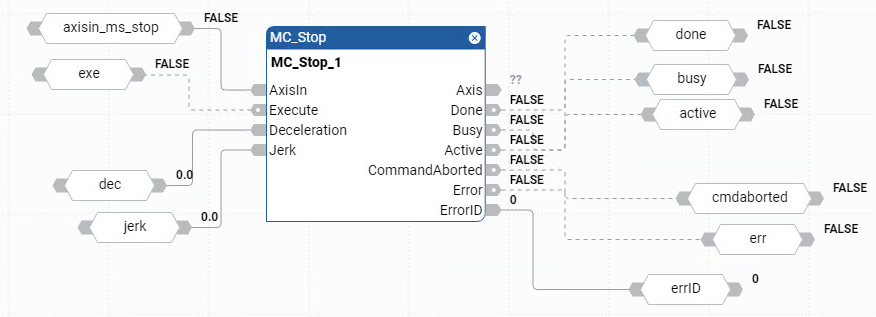
Exemplo de diagrama de blocos de função MC_Stop
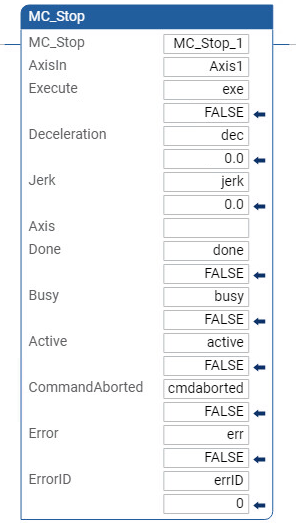
Exemplo de diagrama de ladder MC_Stop
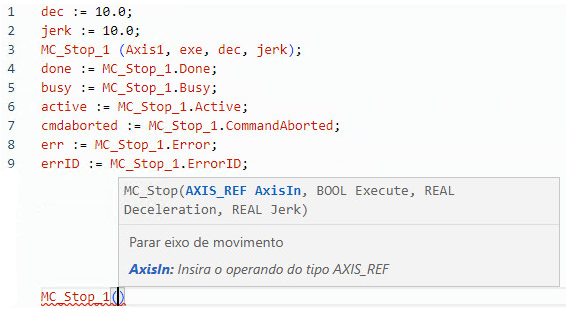
Exemplo de texto estruturado MC_Stop
Resultados
Dê sua opinião