MC_SetPosition (definir posição do controle de movimento)
A instrução MC_SetPosition altera o sistema de coordenadas de um eixo manipulando a posição real de um eixo com o mesmo valor sem causar qualquer movimento.
Detalhes da operação:
- O MC_SetPosition pode ser concluído com sucesso apenas quando o estado do eixo for Suspenso, Movimento contínuo (MC_ExecutionMode = 0) ou quando o movimento contínuo for concluído, e termina com um estado Suspenso (MC_ExecutionMode = 1).
- O MC_SetPosition opera como MC_Home no HomingMode = MC_HOME_DIRECT (0x04), exceto que o bloco da função MC_Home define o status de Eixo na Posição Inicial.
- Quando MC_ExecutionMode = 0 (mcImmediately), a execução do bloco de função MC_SetPosition relatará um erro se houver um movimento não contínuo em andamento com o eixo.
- Quando MC_ExecutionMode = 1 (mcQueued), a configuração da posição real ocorrerá apenas quando todos os movimentos em andamento anteriores pararem. Isto é, cada bloco da função anterior deve ter pelo menos uma saída Concluído, Cancelado ou Erro igual a True.
Linguagens suportadas: Diagrama de blocos de função, diagrama de ladder, texto estruturado.
Essa instrução aplica-se aos controladores L50E e L70E que suportam o controle de movimento.
MC_SetPosition
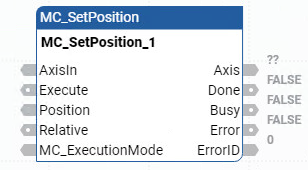
Parâmetro | Tipo do parâmetro | Tipo de dados | Descrição |
|---|---|---|---|
EN | Entrada | BOOL | Habilitação do bloco de instruções.
Aplica-se apenas aos programas do diagrama de ladder. |
AxisIn | Entrada | AXIS_REF FB_AXIS_REF | Use o tipo de dados AXIS_REF para definir AxisIn. Para um FB_Axis (eixo de feedback), use o Tipo de dados FB_AXIS_REF para definir AxisIn. |
Execute | Entrada | BOOL | TRUE: Inicia a configuração da posição do eixo. |
Position | Entrada | REAL | A posição absoluta ou a distância relativa a ser definida para o eixo. |
Relative | Entrada | BOOL |
|
MC_ExecutionMode | Entrada | SINT | Os valores são:
Para (MC_ExecutionMode = 0), este bloco de função é concluído com sucesso apenas quando o estado do eixo for Desativado ou Suspenso. A execução desse bloco de função relatará um erro se houver um movimento em andamento não contínuo com o eixo nesse modo. Para (MC_ExecutionMode = 1), esse bloco de função será concluído com sucesso quando o estado do eixo for Desativado, Suspenso ou o movimento em andamento puder ser concluído, terminando em um estado Suspenso. Outros valores de entrada são reservados no momento e são considerados parâmetros inválidos. |
ENO | Saída | BOOL | Ativar saída. Aplica-se apenas aos programas do diagrama de ladder. |
Axis | Saída | AXIS_REF | A saída do eixo é somente leitura em programas do diagrama de ladder. |
Done | Saída | BOOL | TRUE: A Posição tem um novo valor. |
Busy | Saída | BOOL | TRUE: O bloco de função não foi concluído. |
Error | Saída | BOOL | Indica a ocorrência de um erro.
|
ErrorID | Saída | UINT | Um numérico exclusivo que identifica o erro. Os erros dessa instrução são definidos em IDs de erro do bloco da função de controle de movimento. |
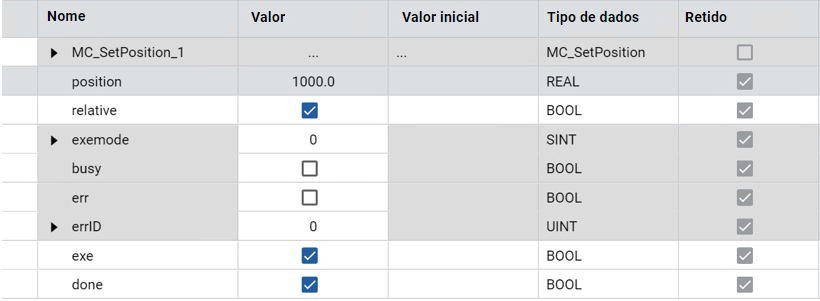
Exemplos de MC_SetPosition
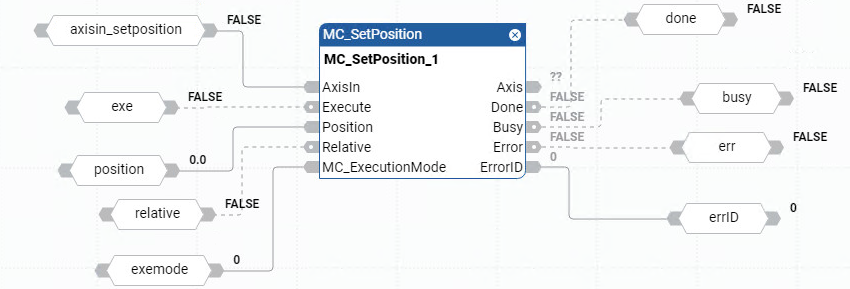
Exemplo de diagrama de blocos de função MC_SetPosition
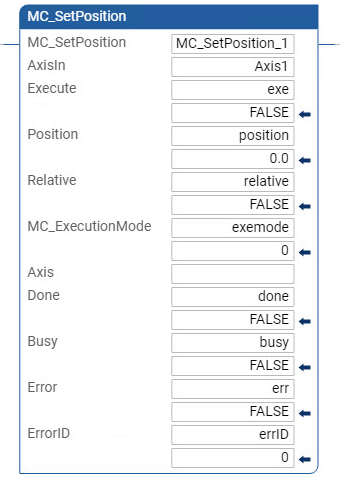
Exemplo de diagrama de ladder MC_SetPosition
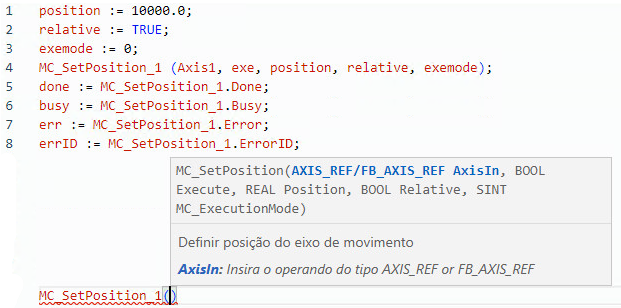
Exemplo de texto estruturado MC_SetPosition
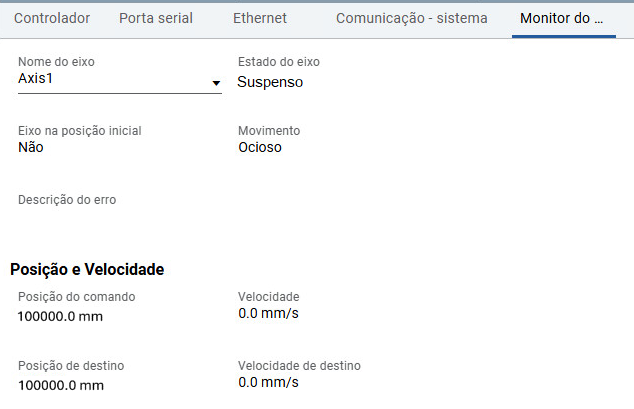
Resultados
Dê sua opinião