MC_ReadActualVelocity (velocidade real de leitura do controle de movimento)
A instrução MC_ReadActualVelocity retorna o valor da velocidade real do eixo de feedback.
MC_ReadActualVelocity somente se aplica ao movimento de feedback.
Antes de executar MC_ReadActualVelocity, verifique se o eixo está em um dos seguintes estados de eixo:
- Suspenso
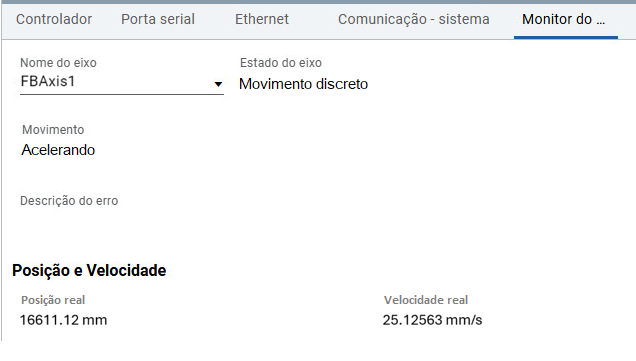
- Movimento Discreto
- Parada de Erro
Linguagens suportadas: Diagrama de blocos de função, diagrama de ladder, texto estruturado.
Essa instrução aplica-se aos controladores L50E e L70E que suportam o controle de movimento.
MC_ReadActualVelocity
Parâmetro | Tipo do parâmetro | Tipo de dados | Descrição |
|---|---|---|---|
AxisIn | Entrada | FB_AXIS_REF | Para um FB_Axis (eixo de retorno), use o tipo de dados FB_AXIS_REF para definir AxisIn. |
Enable | Entrada | BOOL |
|
Axis | Saída | FB_AXIS_REF | A saída do eixo é somente leitura em programas do diagrama de ladder. Os parâmetros de saída do eixo são definidos no Tipo de dados FB_AXIS_REF. |
Valid | Saída | BOOL |
|
Busy | Saída | BOOL |
|
Error | Saída | BOOL | Indica a ocorrência de um erro.
|
ErrorID | Saída | UNIT | Um numérico exclusivo que identifica o erro. Os erros dessa instrução são definidos em IDs de erro do bloco da função de controle de movimento. |
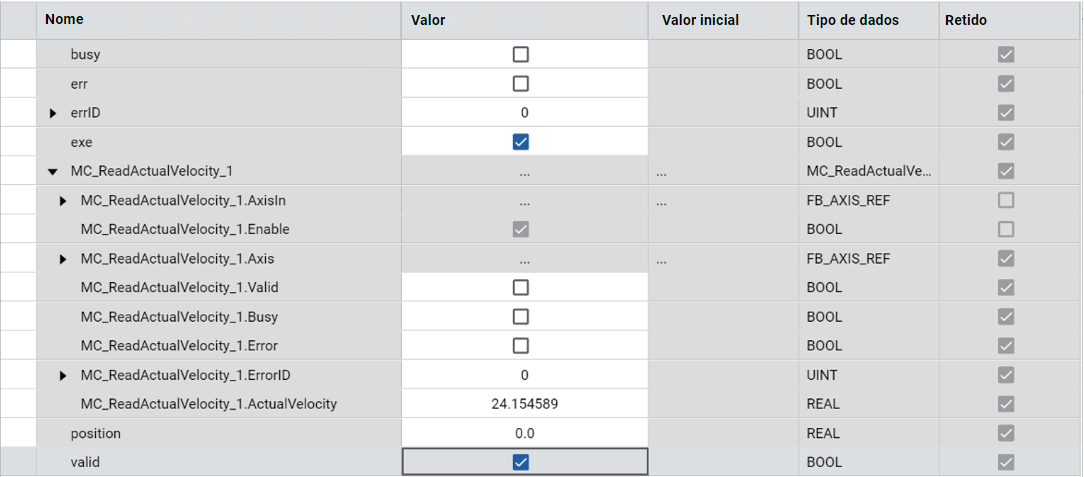
ActualVelocity | Saída | REAL | O valor da velocidade real do eixo de movimento de feedback (na unidade do eixo [u/s]). ActualVelocity é um valor com sinal, o que inclui informações de direção. |
Exemplos de MC_ReadActualVelocity
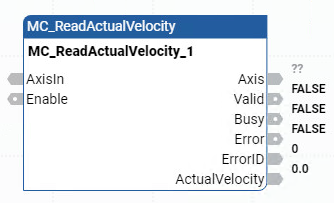
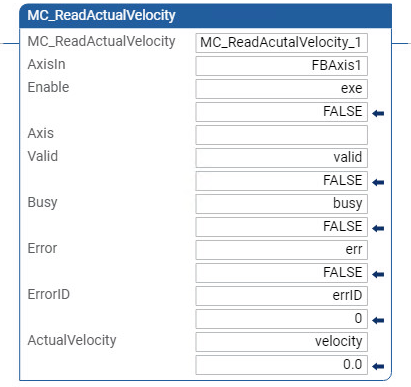
Exemplo de diagrama de blocos de função MC_ReadActualVelocity
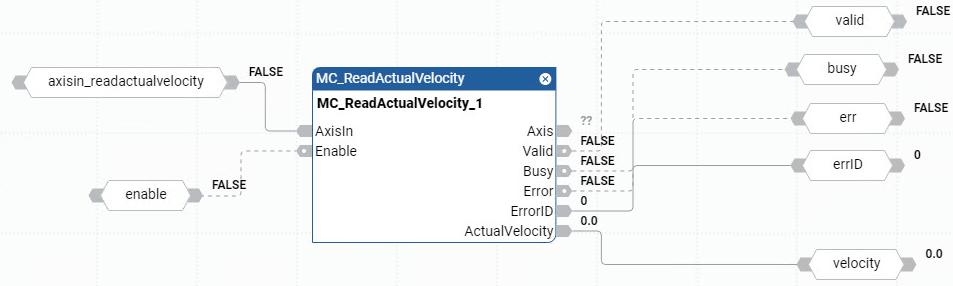
Exemplo de diagrama de ladder MC_ReadActualVelocity
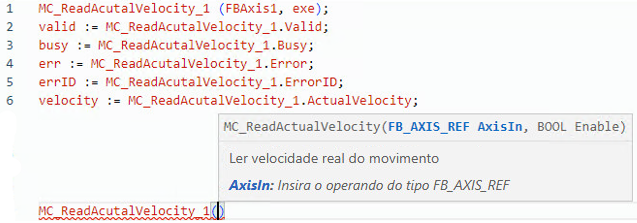
Exemplo de texto estruturado MC_ReadActualVelocity
Resultados
Dê sua opinião