MC_MoveRelative (relativo de movimento de controle de movimento)
A instrução MC_MoveRelative comanda um movimento controlado para uma distância especificada com relação à posição real no tempo de execução.
Detalhes da operação:
- Como a direção do movimento para um MC_MoveRelative é determinada pela posição atual e pela posição de destino, o sinal da Velocidade é ignorado.
- MoveRelative conclui com Velocidade zero se não for cancelado por outro bloco da função.
- Se o MC_MoveRelative for emitido quando o estado do eixo do controladorMicro800for Suspenso e a distância relativa ao movimento for zero, a execução do bloco de função é relatada imediatamente como Concluída.
- Para um controladorMicro800, o sinal da Velocidade de entrada para um MC_MoveRelative é ignorado, porque a direção do movimento é determinada pela posição Atual e a posição de Destino.
Linguagens suportadas: Diagrama de blocos de função, diagrama de ladder, texto estruturado.
Essa instrução aplica-se aos controladores L50E e L70E que suportam o controle de movimento.
MC_MoveRelative
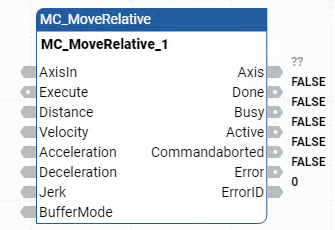
Operação MC_MoveRelative
Parâmetro | Tipos de parâmetro | Tipos de dados | Descrições |
|---|---|---|---|
EN | Entrada | BOOL | Habilitação do bloco de instruções.
Aplica-se apenas aos programas do diagrama de ladder. |
Execute | Entrada | BOOL | Indica quando iniciar o movimento.
|
Distance | Entrada | REAL | Distância relativa para o movimento (em unidade técnica [u]). |
Velocity | Entrada | REAL | Valor da velocidade máxima (não necessariamente alcançada) [u/s]. Como a direção do movimento é determinada pela Posição de entrada, o sinal de Velocidade é ignorado pelo bloco de função. A velocidade máxima pode não ser alcançada quando Jerk = 0. |
Acceleration | Entrada | REAL | Valor da aceleração (aumentando a energia do motor) [u/s 2 ]. |
Deceleration | Entrada | REAL | Valor da desaceleração (diminuindo a energia do motor) [u/s 2 ]. |
Jerk | Entrada | REAL | Valor do arremesso [u/s 3 ]. |
BufferMode | Entrada | SINT | Este parâmetro não é usado. |
ENO | Saída | BOOL | Ativar saída. Aplica-se apenas aos programas do diagrama de ladder. |
Axis | Saída | AXIS_REF | A saída do eixo é somente leitura em programas do diagrama de ladder. |
Done | Saída | BOOL | TRUE: Distância do comando atingida. Quando a entrada em posição é habilitada para um eixo, o sinal em posição deve ser definido para ativo antes de Done = True. |
Busy | Saída | BOOL |
|
Active | Saída | BOOL | TRUE: Indica que o bloco de instruções tem controle sobre o eixo. |
CommandAborted | Saída | BOOL | TRUE: Comando é substituído por outro comando ou Parada de erro. |
Error | Saída | BOOL | Indica a ocorrência de um erro.
|
ErrorID | Saída | UINT | Um numérico exclusivo que identifica o erro. Os erros dessa instrução são definidos em IDs de erro do bloco da função de controle de movimento. |
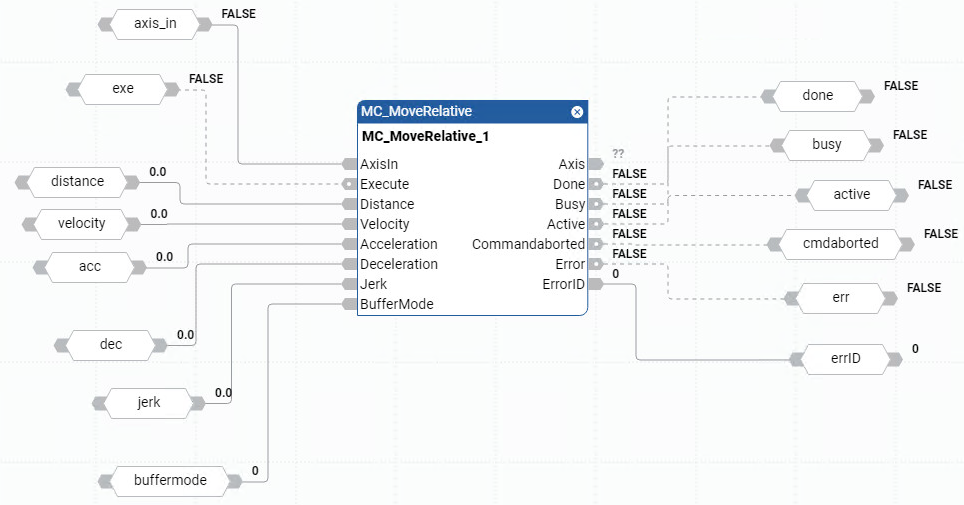
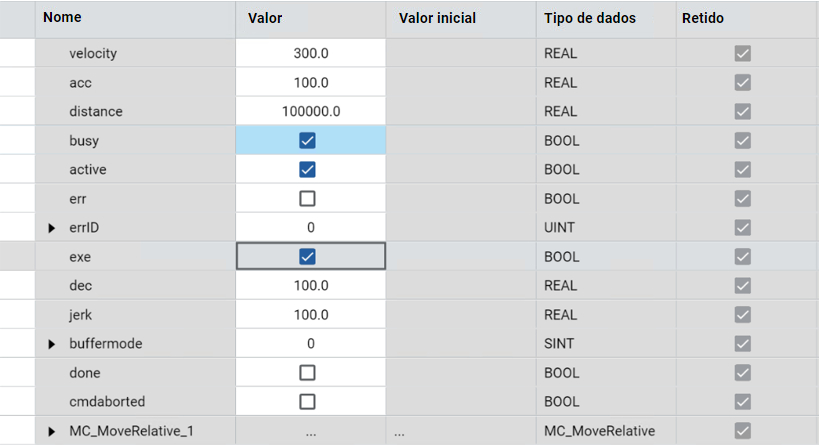
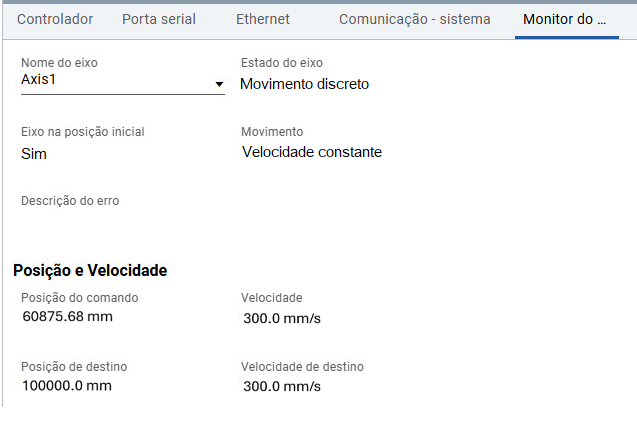
Exemplos de MC_MoveRelative
Exemplo de diagrama de blocos de função MC_MoveRelative
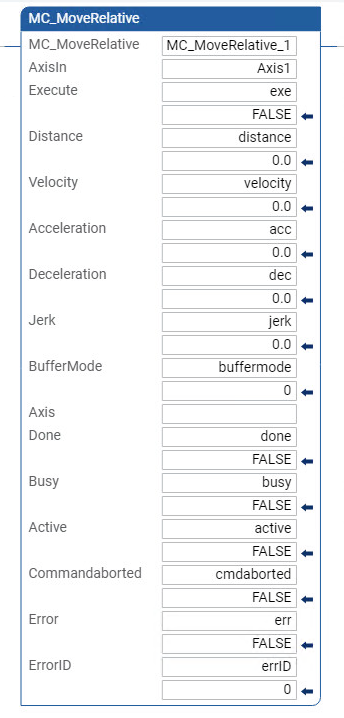
Exemplo de diagrama de ladder MC_MoveRelative
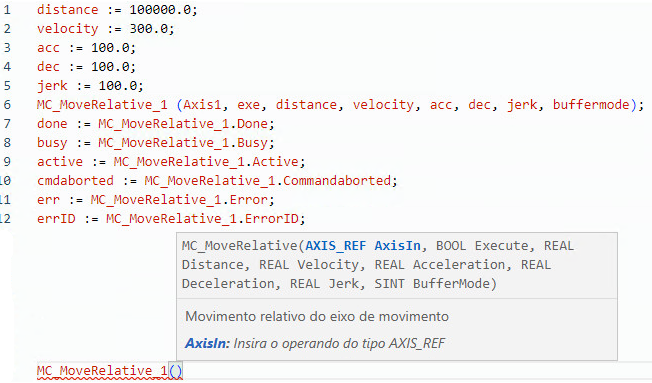
Exemplo de texto estruturado MC_MoveRelative
Exemplo de resultado de MC_MoveRelative
Dê sua opinião