MC_Home (controle de movimento inicial)
A instrução MC_Home comanda o eixo para realizar a sequência
<search home>
. Os detalhes desse sequência dependem do fabricante e podem ser configurados pelos parâmetros do eixo. A entrada Posição é usada para configurar a posição absoluta quando um sinal de referência é detectado e o deslocamento do Início configurado é alcançado.Detalhes da operação:
- Depois que MC_Power é emitido, o eixo é redefinido do status Iniciado para 0 (não iniciado). Na maioria dos casos, depois que o eixo é ligado, o bloco da função MC_Home precisa ser executado para calibrar a posição do eixo e a referência Início.
- O bloco de função MC_Home apenas pode ser cancelado usando um bloco de função MC_Stop ou MC_Power. Se ele for cancelado antes de concluir, a posição Início previamente pesquisada é considerada inválida e o status Iniciado do eixo é limpo.
Linguagens suportadas: Diagrama de blocos de função, diagrama de ladder, texto estruturado.
Essa instrução aplica-se aos controladores L50E e L70E que suportam o controle de movimento.
MC_Home
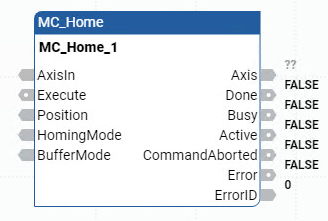
Parâmetro | Tipo do parâmetro | Tipo de dados | Descrição |
|---|---|---|---|
EN | Entrada | BOOL | Habilitação do bloco de instruções.
Aplica-se apenas aos programas do diagrama de ladder. |
AxisIn | Entrada | AXIS_REF | Use os parâmetros do tipo de dados AXIS_REF para definir AxisIn. |
Execute | Entrada | BOOL | Indica quando iniciar o movimento.
|
Position | Entrada | REAL | A posição absoluta é configurada quando o sinal de referência é detectado e o deslocamento Início configurado é alcançado. A faixa de valores para essa entrada é o pulso físico -0x40000000 - 0x40000000 depois que a posição é convertida da unidade de posição do usuário para o pulso PTO. Definir o Valor da posição dentro do Limite Flexível. Um valor de entrada inválido resulta em erro. ID do erro = MC_FB_ERR_PARAM. |
HomingMode | Entrada | SINT | Entrada Enum para o modo Inicialização. |
BufferMode | Entrada | SINT | Não usado. O modo sempre é mcAborting. |
ENO | Saída | BOOL | Ativar saída. Aplica-se apenas aos programas do diagrama de ladder. |
Done | Saída | BOOL |
|
Busy | Saída | BOOL |
|
Active | Saída | BOOL | TRUE: Indica que o bloco de instruções tem controle sobre o eixo. |
CommandAborted | Saída | BOOL | TRUE: Comando é substituído por outro comando ou parada de erro. |
Error | Saída | BOOL | Indica a ocorrência de um erro.
|
ErrorID | Saída | UNIT | Um numérico exclusivo que identifica o erro. Os erros dessa instrução são definidos em IDs de erro do bloco da função de controle de movimento. |
Valor | Nome | Descrição |
|---|---|---|
0x00 | MC_HOME_ABS_SWITCH | Processo de retorno à posição inicial pesquisando o interruptor Posição inicial absoluta. |
0x01 | MC_HOME_LIMIT_SWITCH | Processo de retorno à posição inicial pesquisando o interruptor de limite. |
0x02 | MC_HOME_REF_WITH_ABS | Processo de retorno à posição inicial pesquisando o interruptor Posição inicial absoluta e usando o pulso de referência do codificador. |
0x03 | MC_HOME_REF_PULSE | Processo de retorno à posição inicial pesquisando o interruptor de limite e usando o pulso de referência do codificador. |
0x04 | MC_HOME_DIRECT | Processo estático de retorno à posição inicial forçando diretamente uma posição inicial de referência do usuário. O bloco de função definirá a posição atual do mecanismo como posição inicial, com sua posição determinada pelo parâmetro de entrada "Posição". |
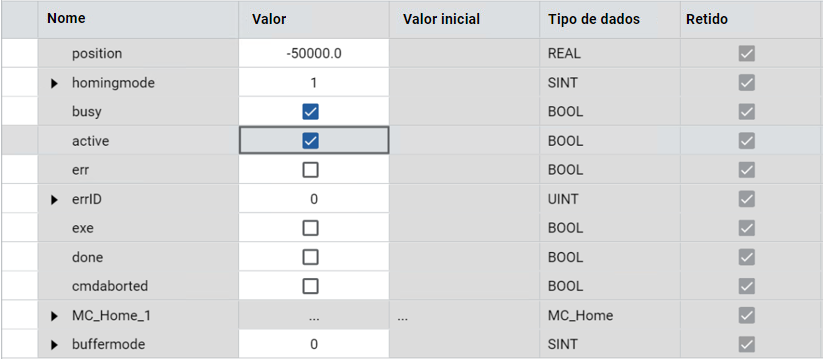
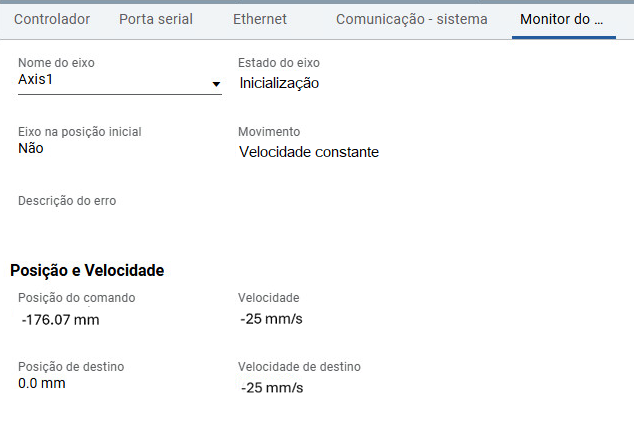
Exemplos de MC_Home
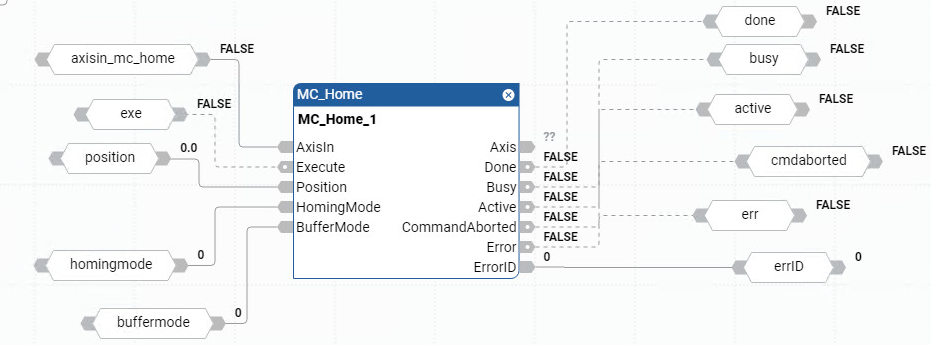
Exemplo de diagrama de blocos de função MC_Home
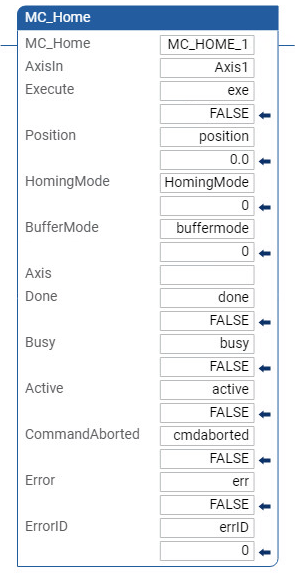
Exemplo de diagrama de ladder MC_Home
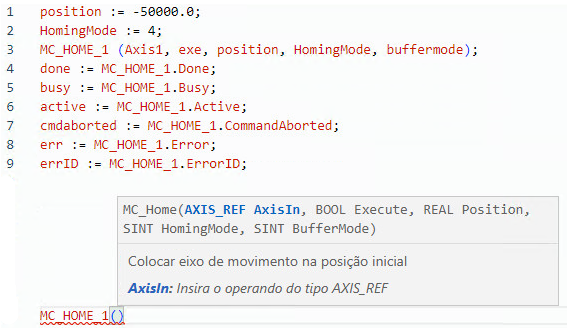
Exemplo de texto estruturado MC_Home
Resultados
Dê sua opinião