IPIDCONTROLLER (controllore proporzionale–integrale–derivativo)
Configurare e controllare gli ingressi e le uscite utilizzate per la logica proporzionale-integrale-derivativa (PID). La logica PID serve per controllare le proprietà fisiche quali temperatura, pressione, liquido, livello o portata tramite cicli di processo che calcolano un valore di errore come la differenza tra un setpoint desiderato e una variabile di processo misurata. Il controllore tenta di ridurre al minimo l'errore nel tempo attraverso la regolazione di una variabile di controllo. Il calcolo include termini proporzionali (P), integrali (I) e derivativi (D) che vengono utilizzati come segue:
- P: valori di errore presenti.
- I: valori di errore passati.
- D: possibili valori di errori futuri in base alla velocità corrente di modifica che controlla proprietà fisiche quali temperatura, pressione, livello dei liquidi o portata tramite cicli di processo.
Lingue supportate: Diagramma a blocchi funzione, Diagramma Ladder, Testo strutturato.
Questa istruzione vale per i controllori Micro810, L20E, L50E e L70E.
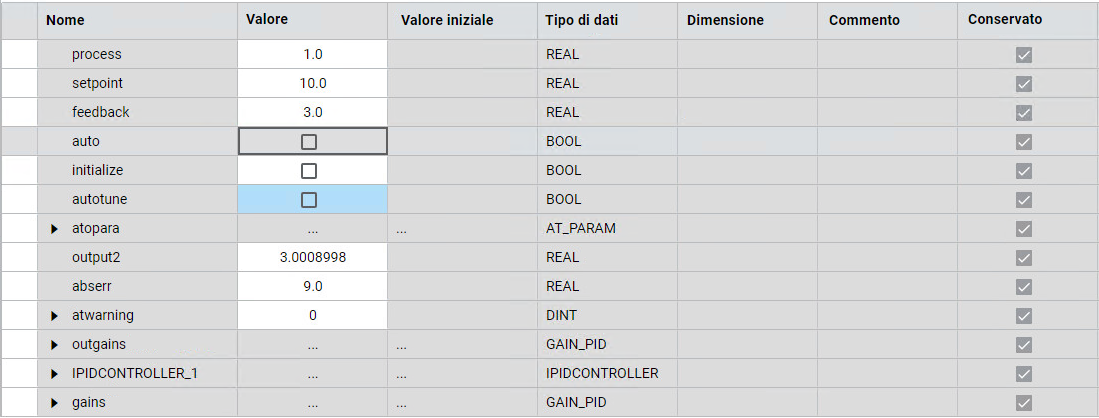
IPIDCONTROLLER
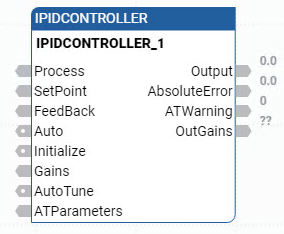
Parametro | Tipo di parametro | Tipo di dati | Descrizione |
|---|---|---|---|
EN | Ingresso | BOOL | Se TRUE, abilita il blocco istruzione.
Applicabile alle programmazioni in diagramma ladder. |
Process | Ingresso | REAL | Valore di processo, ovvero il valore misurato all'uscita del processo. |
SetPoint | Ingresso | REAL | Set point. |
FeedBack | Ingresso | REAL | Segnale di feedback, ovvero il valore della variabile di controllo applicato al processo. Ad esempio, il feedback può essere l'uscita IPIDCONTROLLER. |
Auto | Ingresso | BOOL | La modalità operativa del controllore PID:
|
Initialize | Ingresso | BOOL | Una modifica del valore (da TRUE a FALSE o da FALSE a TRUE) causa l'eliminazione di qualsiasi guadagno proporzionale da parte del controllore durante quel ciclo. Inoltre, inizializza le sequenze AutoTune. |
Gains | Ingresso | GAIN_PID | Guadagni PID per IPIDController. Utilizzare il Tipo di dati GAIN_PID per definire i parametri per l'ingresso Gains. |
AutoTune | Ingresso | BOOL |
|
ATParameters | Ingresso | AT_Param | Parametri Auto Tune. Utilizzare il Tipo di dati AT_Param per definire i parametri per l'ingresso ATParameters. |
Output | Uscita | REAL | Valore di uscita dal controllore. |
AbsoluteError | Uscita | REAL | Errore assoluto (Process – SetPoint) dal controllore. |
ATWarnings | Uscita | DINT | (ATWarning) Avviso per la sequenza Auto Tune. I possibili valori sono:
|
OutGains | Uscita | GAIN_PID | Guadagni calcolati dopo le sequenze AutoTune. Utilizzare il tipo di dati GAIN_PID per definire l'uscita OutGains. |
ENO | Uscita | BOOL | Abilita uscita. Applicabile alle programmazioni in diagramma ladder. |
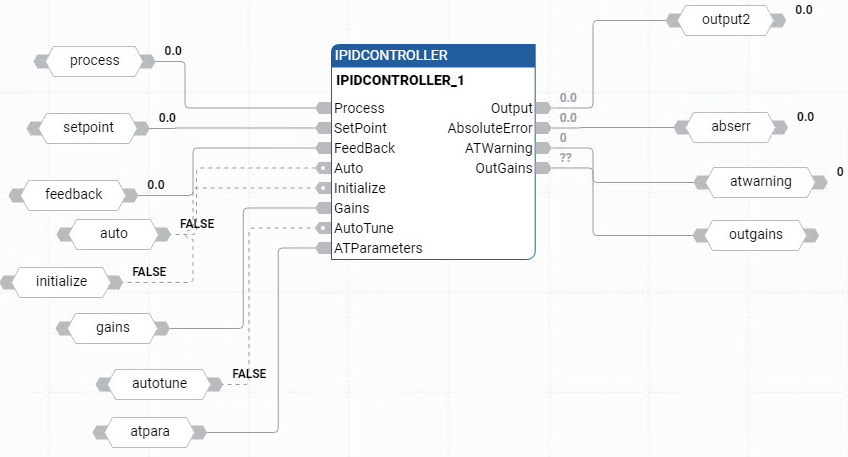
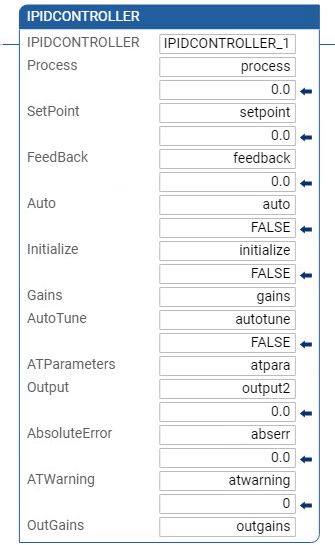
Esempi di IPIDCONTROLLER
Esempio di diagramma a blocchi funzionali IPIDCONTROLLER
Esempio di diagramma ladder IPIDCONTROLLER
Esempio di testo strutturato IPIDCONTROLLER
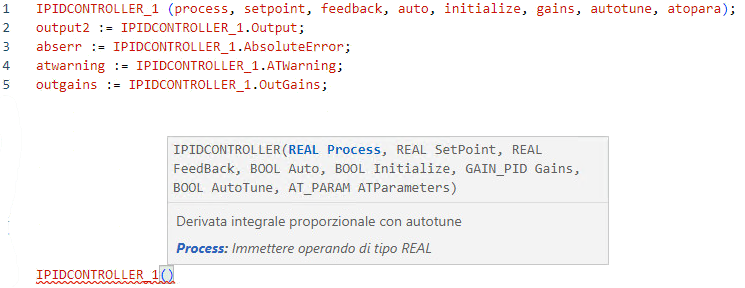
(* ST equivalence: IPIDController1 is an instance of IPIDController block *) IPIDController1(Proc, SP, FBK, Auto, Init, G_In, A_Tune, A_TunePar, Err ); Out_process := IPIDController1.Output ; A_Tune_Warn := IPIDController1.ATWarning ; Gain_Out := IPIDController1.OutGains ;
Risultati
Fornire un feedback