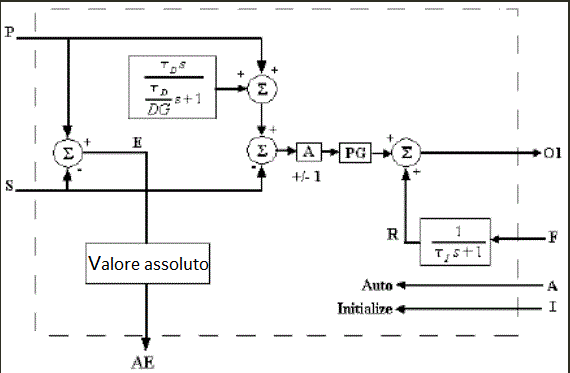
Operazione del blocco funzione IPIDController
Quando Input Auto è TRUE, IPIDController funziona in modalità normale automatica.
Quando Input Auto è FALSE, causa il ripristino di R per il tracciamento (F-GE), forzando l'uscita IPIDController a tracciare il feedback entro i limiti di IPIDController. A questo punto il controllore ritorna in modalità automatica senza l'incremento dell'uscita.
Operazione del blocco funzione IPIDController
Per il parametro di ingresso Initialize, il passaggio da FALSE a TRUE o da TRUE a FALSE quando AutoTune è FALSE, comporta che IPIDController elimini qualsiasi azione di guadagno proporzionale durante il dato ciclo (ad esempio, Initialize). Utilizzare questo processo per prevenire il bumping dell'uscita quando si effettuano modifiche al SetPoint mediante un blocco funzione dell'interruttore.
Per eseguire una sequenza AutoTune, ATParameters di ingresso devono essere completati. I parametri Input Gain e DirectActing devono essere impostati in base al processo e all'impostazione di DerivativeGain (di solito 0,1). La sequenza AutoTune viene avviata con la seguente sequenza:
- Impostare il parametro di ingresso Initialize su TRUE.
- Impostare il parametro di ingresso Autotune su TRUE.
- Cambiare il parametro di ingresso Initialize su FALSE.
- Attendere finché il parametro di uscita ATWarning non passa a 2.
- Trasferire i valori del parametro di uscita OutGains al parametro di ingresso Gains.
Per finalizzare la regolazione, potrebbe essere necessario eseguire una regolazione fine in funzione dei requisiti e dei processi. Quando si imposta TimeDerivative a 0,0, IPIDController forza DerivativeGain a 1,0 e quindi funziona come un controllore PI.
Fornire un feedback