MC_Stop (arresto del controllo movimento)
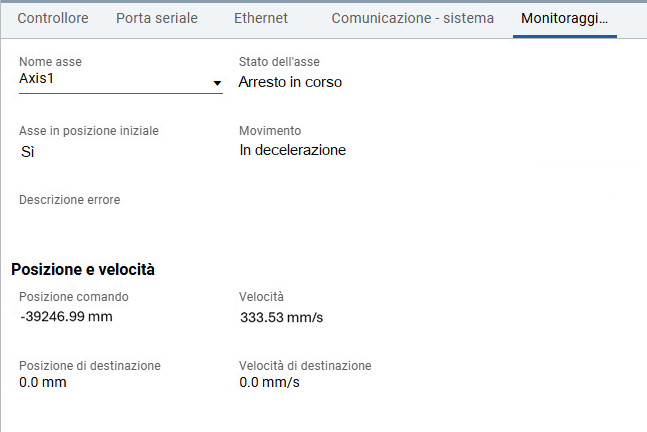
L'istruzione MC_Stop comanda un arresto di movimento controllato e trasferisce lo stato dell'asse su Arresto in corso. Qualsiasi esecuzione di blocchi funzione in corso viene annullata. I comandi di movimento dei blocchi funzione vengono tutti ignorati fino a che lo stato dell'asse non passa a Fermo.
Dettagli operazione:
- Fin quando l'ingresso Execute è alto, l'asse rimane nello stato di Arresto in corso. Mentre l'asse è nello stato Arresto in corso, nessun altro blocco funzione di movimento può eseguire un movimento sullo stesso asse.
- Se Decelerazione è uguale a zero, i parametri MC_Stop vengono determinati dall'impostazione Arresto di emergenza della configurazione dell'asse, incluso tipo E-Stop, E-stop Deceleration e E-stop Jerk.
- Quando non sono presenti errori durante la sequenza di arresto, lo stato dell'asse esegue una transizione a Fermo dopo che il bit Completato viene IMPOSTATO e l'ingresso Execute passa a False.
- Utilizzare MC_Stop per la funzione Arresto di emergenza o situazioni di eccezione. Utilizzare MC_Halt per il normale l'arresto del movimento.
Lingue supportate: Diagramma a blocchi funzione, Diagramma Ladder, Testo strutturato.
Questa istruzione si applica ai controllori L50E e L70E che supportano il controllo del movimento.
MC_Stop
Parametro | Tipo di parametro | Tipo di dati | Descrizione |
|---|---|---|---|
EN | Ingresso | BOOL | Abilitazione del blocco istruzione.
Applicabile solo alle programmazioni in diagramma ladder. |
AxisIn | Ingresso | AXIS_REF | Utilizzare il tipo di dati AXIS_REF per definire i parametri per AxisIn. |
Execute | Ingresso | BOOL |
|
Deceleration | Ingresso | REAL | Valore della decelerazione [u/s 2 ]. |
Jerk | Ingresso | REAL | Valore del jerk [u/s 3 ]. |
ENO | Uscita | BOOL | Abilita uscita. Applicabile solo alle programmazioni in diagramma ladder. |
Axis | Uscita | L'uscita dell'asse nei programmi Diagramma Ladder è di sola lettura. | |
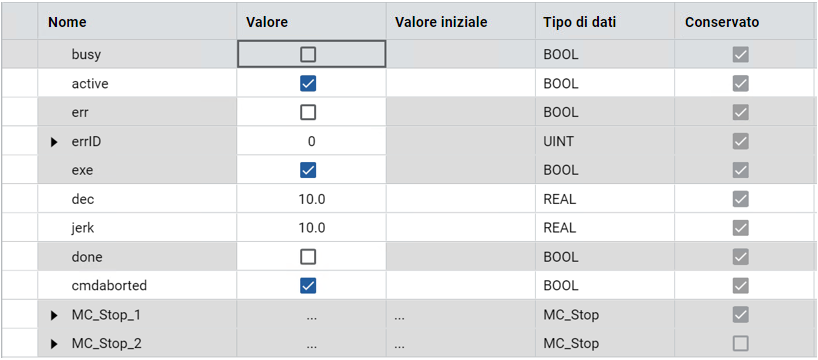
Done | Uscita | BOOL | TRUE: La velocità zero è stata raggiunta senza errori durante la sequenza di arresto. |
Busy | Uscita | BOOL | TRUE: Il blocco funzione non è terminato. |
Active | Uscita | BOOL | TRUE: Indica che il blocco funzione ha il controllo dell'asse. |
CommandAborted | Uscita | BOOL | TRUE: Il comando è stato sostituito tramite override dal blocco funzione MC_Power(OFF) o Arresto errore. |
Error | Uscita | BOOL | Indica che si è verificato un errore.
|
ErrorID | Uscita | UINT | Numero univoco che identifica l'errore. Gli errori per questa istruzione sono definiti in ID errori del blocco funzione di controllo movimento. |
Esempi di MC_Stop
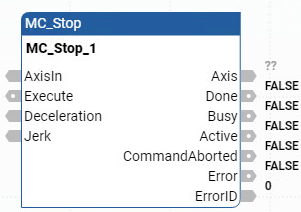
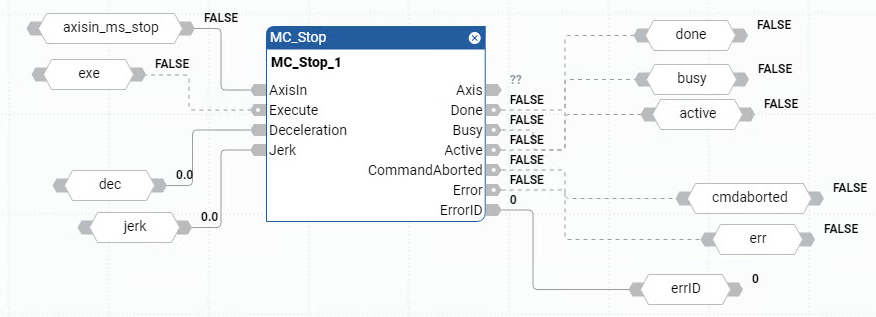
Esempio di diagramma a blocchi funzionali MC_Stop
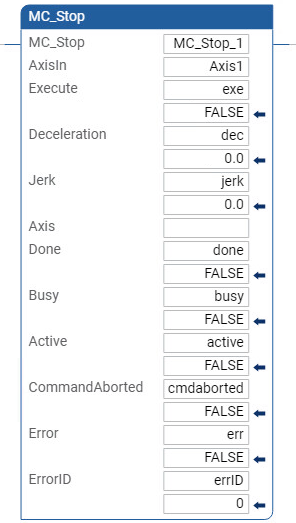
Esempio di diagramma ladder MC_Stop
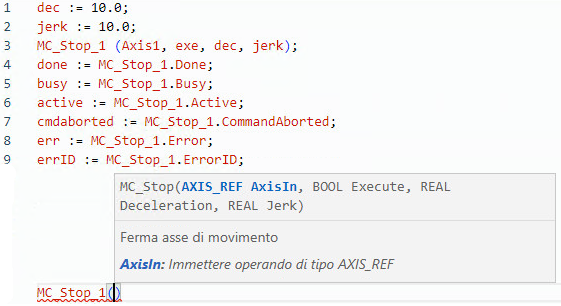
Esempio di testo strutturato MC_Stop
Risultati
Fornire un feedback