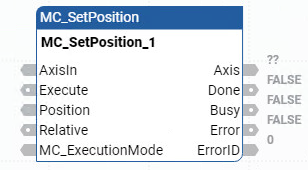
MC_SetPosition (posizione impostazione del controllo movimento)
L'istruzione MC_SetPosition sposta il sistema di coordinate di un asse modificando la relativa posizione effettiva con lo stesso valore, senza causare alcun movimento.
Dettagli operazione:
- MC_SetPosition può essere completato correttamente solo quando lo stato dell'asse è Fermo, Movimento continuo (MC_ExecutionMode = 0) o quando il movimento in corso viene completato e termina con lo stato Fermo (MC_ExecutionMode = 1).
- MC_SetPosition opera allo stesso modo di MC_Home quando HomingMode = MC_HOME_DIRECT (0x04), ad eccezione del fatto che il blocco funzione MC_Home imposta lo stato dell'asse su Azzerato.
- Quando MC_ExecutionMode = 0 (mcImmediately), l'esecuzione del blocco di funzione MC_SetPosition riporterà un errore in caso di movimento in corso non continuo dell'asse.
- Quando MC_ExecutionMode = 1 (mcQueued), l'impostazione della posizione corrente si verifica solo quando tutto il movimento precedente in corso si arresta. Ovvero, ciascun blocco funzione deve avere almeno una delle uscite Done, Aborted, o Error uguale a True.
Lingue supportate: Diagramma a blocchi funzione, Diagramma Ladder, Testo strutturato.
Questa istruzione si applica ai controllori L50E e L70E che supportano il controllo del movimento.
MC_SetPosition
Parametro | Tipo di parametro | Tipo di dati | Descrizione |
|---|---|---|---|
EN | Ingresso | BOOL | Abilitazione del blocco istruzione.
Applicabile solo alle programmazioni in diagramma ladder. |
AxisIn | Ingresso | AXIS_REF FB_AXIS_REF | Utilizzare il tipo di dati AXIS_REF per definire AxisIn. Per FB_Axis (asse di feedback), utilizzare il Tipo di dati FB_AXIS_REF per definire AxisIn. |
Execute | Ingresso | BOOL | TRUE: avvia l'impostazione della posizione dell'asse. |
Position | Ingresso | REAL | La posizione assoluta o la distanza relativa da impostare per l'asse. |
Relative | Ingresso | BOOL |
|
MC_ExecutionMode | Ingresso | SINT | I valori sono:
Per (MC_ExecutionMode = 0), questo blocco funzione può essere completato con successo quando lo stato dell'asse è Disattivato o Fermo. L'esecuzione di questo blocco funzione riporterà un errore in caso di movimento in corso non continuo con l'asse in questa modalità. Per (MC_ExecutionMode = 1), questo blocco di funzione può essere completato correttamente quando lo stato dell'asse è Disattivato, Fermo o il movimento in corso può essere completato terminando con lo stato Fermo. Al momento gli altri valori di ingresso sono riservati e pertanto considerati come parametri non validi. |
ENO | Uscita | BOOL | Abilita uscita. Applicabile solo alle programmazioni in diagramma ladder. |
Axis | Uscita | AXIS_REF | L'uscita dell'asse nei programmi Diagramma Ladder è di sola lettura. |
Done | Uscita | BOOL | TRUE: la posizione ha un nuovo valore. |
Busy | Uscita | BOOL | TRUE: Il blocco funzione non è terminato. |
Error | Uscita | BOOL | Indica che si è verificato un errore.
|
ErrorID | Uscita | UINT | Numero univoco che identifica l'errore. Gli errori per questa istruzione sono definiti in ID errori del blocco funzione di controllo movimento. |
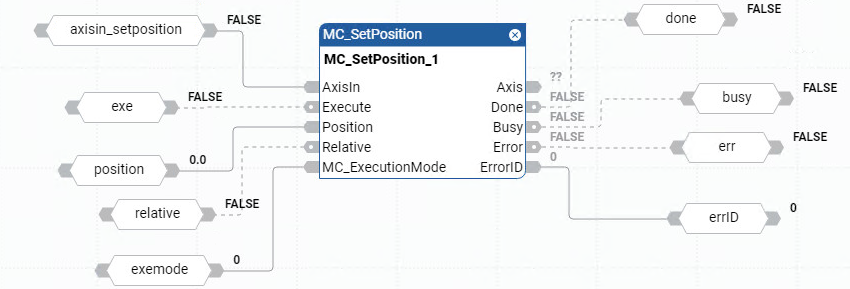
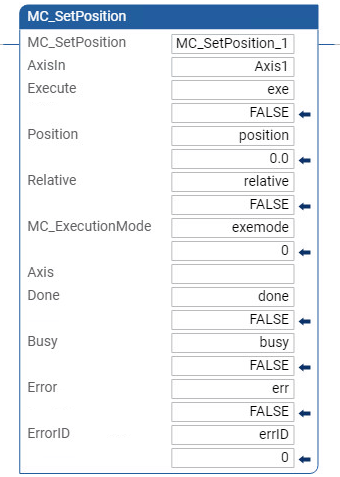
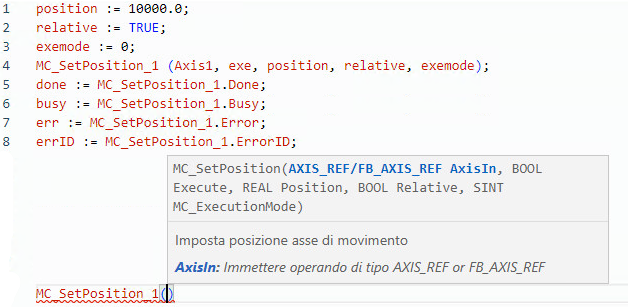
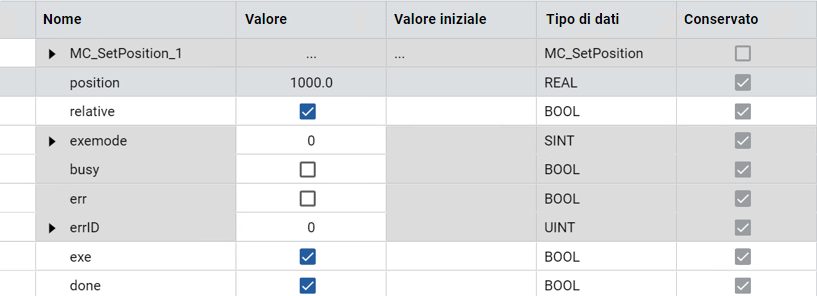
Esempi di MC_SetPosition
Esempio di diagramma a blocchi funzionali MC_SetPosition
Esempio di diagramma ladder MC_SetPosition
Esempio di testo strutturato MC_SetPosition
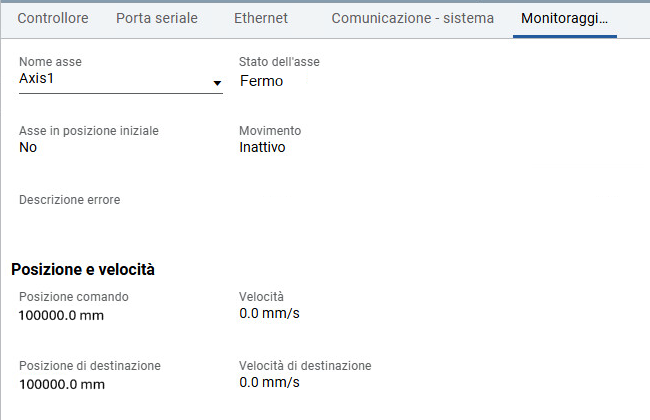
Risultati
Fornire un feedback