MC_ReadActualVelocity (velocità effettiva di lettura del controllo movimento)
L'istruzione MC_ReadActualVelocity restituisce il valore della velocità effettiva dell'asse di feedback.
MC_ReadActualVelocity è applicabile solo al movimento di retroazione.
Prima di eseguire MC_ReadActualVelocity, verificare che l'asse sia in uno dei seguenti stati dell'asse:
- Fermo
- Movimento discreto
- Arresto errore
Lingue supportate: Diagramma a blocchi funzione, Diagramma Ladder, Testo strutturato.
Questa istruzione si applica ai controllori L50E e L70E che supportano il controllo del movimento.
MC_ReadActualVelocity
Parametro | Tipo di parametro | Tipo di dati | Descrizione |
|---|---|---|---|
AxisIn | Ingresso | FB_AXIS_REF | Per un FB_Axis (asse di feedback), utilizzare il tipo di dati FB_AXIS_REF per definire AxisIn. |
Enable | Ingresso | BOOL |
|
Axis | Uscita | FB_AXIS_REF | L'uscita dell'asse nei programmi Diagramma Ladder è di sola lettura. I parametri di uscita dell'asse sono definiti nel Tipo di dati FB_AXIS_REF. |
Valid | Uscita | BOOL |
|
Busy | Uscita | BOOL |
|
Error | Uscita | BOOL | Indica che si è verificato un errore.
|
ErrorID | Uscita | UNIT | Numero univoco che identifica l'errore. Gli errori per questa istruzione sono definiti in ID errori del blocco funzione di controllo movimento. |
ActualVelocity | Uscita | REAL | Il valore della velocità effettiva per l'asse Motion feedback (in unità dell'asse [u/s]). ActualVelocity è un valore con segno, che include le informazioni di direzione. |
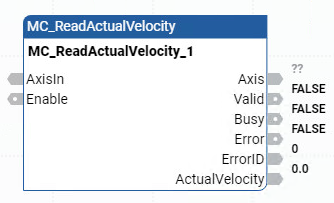
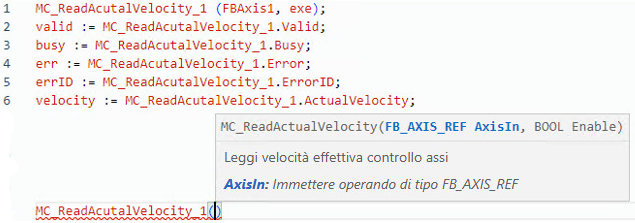
Esempi di MC_ReadActualVelocity
Esempio di diagramma a blocchi funzionali MC_ReadActualVelocity
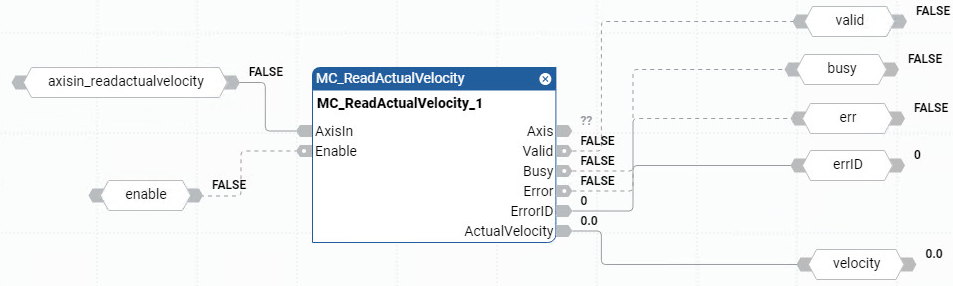
Esempio di diagramma ladder MC_ReadActualVelocity

Esempio di testo strutturato MC_ReadActualVelocity
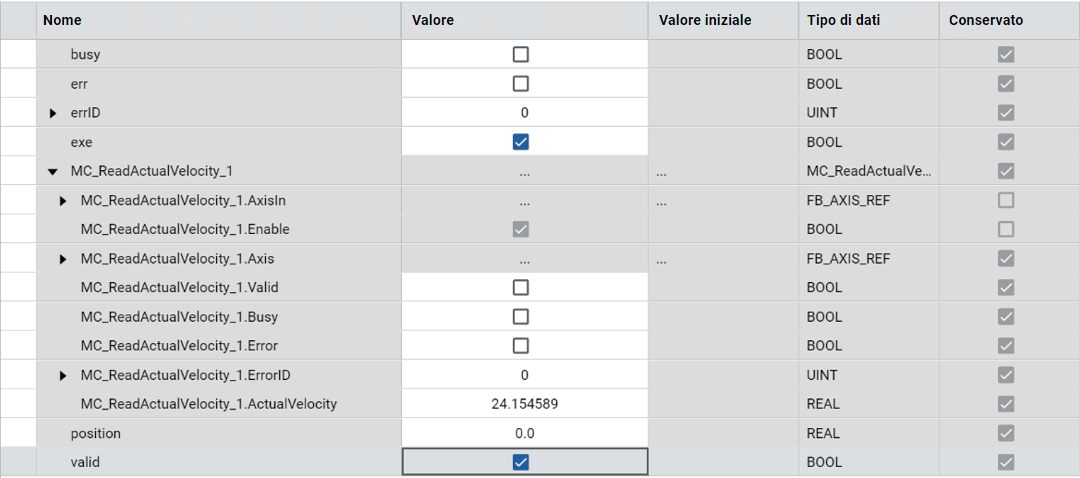
Risultati
Fornire un feedback