MC_MoveRelative (movimento relativo del controllo movimento)
L'istruzione MC_MoveRelative comanda un movimento controllato di una distanza specificata relativa all'effettiva posizione al momento dell'esecuzione.
Dettagli operazione:
- Il segno della velocità viene ignorato, in quanto la direzione del movimento per MC_MoveRelative viene determinata dalla posizione corrente e dalla posizione di destinazione.
- MoveRelative viene completato con velocità zero, se non ne viene eseguito l'override da parte di un altro blocco funzione.
- Se viene emesso il comando MC_MoveRelative quando lo stato dell'asse del controlloreMicro800è Fermo e la distanza relativa di movimento è zero, l'esecuzione del blocco funzione viene riportata immediatamente come Done.
- Per un controlloreMicro800, il segno dell'ingresso Velocità per MC_MoveRelative viene ignorato, in quanto la direzione del movimento viene determinata dalla posizione corrente e dalla posizione di destinazione.
Lingue supportate: Diagramma a blocchi funzione, Diagramma Ladder, Testo strutturato.
Questa istruzione si applica ai controllori L50E e L70E che supportano il controllo del movimento.
MC_MoveRelative
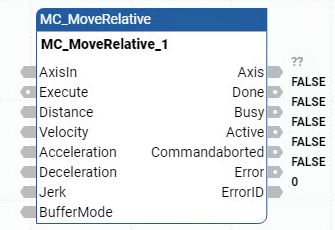
Operazione MC_MoveRelative
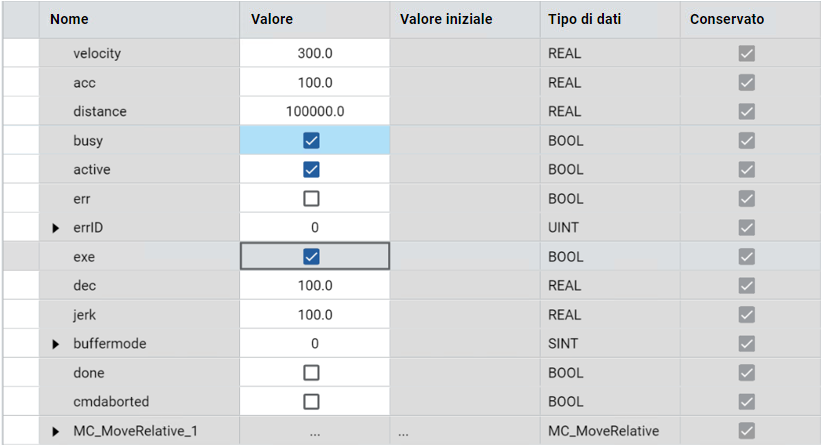
Parametro | Tipi di parametro | Tipi di dati | Descrizioni |
|---|---|---|---|
EN | Ingresso | BOOL | Abilitazione del blocco istruzione.
Applicabile solo alle programmazioni in diagramma ladder. |
Execute | Ingresso | BOOL | Indica quando avviare il movimento.
|
Distance | Ingresso | REAL | Distanza relativa del movimento (in unità tecnica [u]). |
Velocity | Ingresso | REAL | Valore della velocità massima (non necessariamente raggiunta) [u/s]. Dato che la direzione del movimento è determinata dal valore del parametro Posizione, il segno di Velocità è ignorato dal blocco funzione. La velocità massima può non essere raggiunta se Jerk = 0. |
Acceleration | Ingresso | REAL | Valore di accelerazione (aumento dell'energia al motore) [u/s 2 ]. |
Deceleration | Ingresso | REAL | Valore della decelerazione (diminuzione dell'energia al motore) [u/s 2 ]. |
Jerk | Ingresso | REAL | Valore del jerk [u/s 3 ]. |
BufferMode | Ingresso | SINT | Questo parametro non è usato. |
ENO | Uscita | BOOL | Abilita uscita. Applicabile solo alle programmazioni in diagramma ladder. |
Axis | Uscita | AXIS_REF | L'uscita dell'asse nei programmi Diagramma Ladder è di sola lettura. |
Done | Uscita | BOOL | TRUE: Distanza comandata raggiunta. Quando l'ingresso in posizione per questo asse è abilitato, il segnale in posizione deve essere impostato come attivo prima che Done = True. |
Busy | Uscita | BOOL |
|
Active | Uscita | BOOL | TRUE: Indica che il blocco istruzione ha il controllo sull'asse. |
CommandAborted | Uscita | BOOL | TRUE: Viene eseguito l'override del comando da parte di un altro comando o Arresto errore. |
Error | Uscita | BOOL | Indica che si è verificato un errore.
|
ErrorID | Uscita | UINT | Numero univoco che identifica l'errore. Gli errori per questa istruzione sono definiti in ID errori del blocco funzione di controllo movimento. |
Esempi di MC_MoveRelative
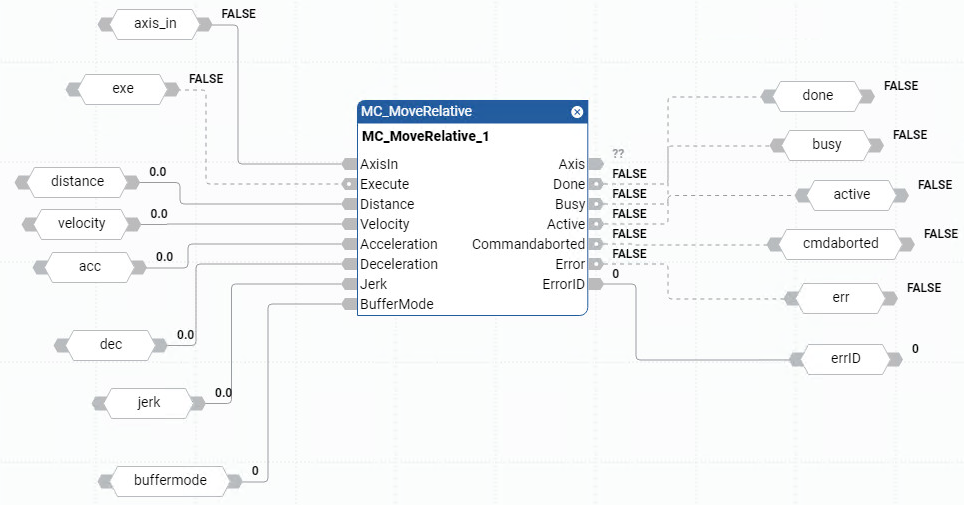
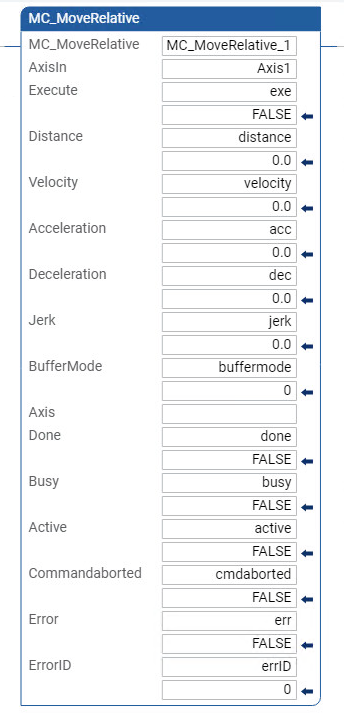
Esempi di diagramma a blocchi funzionali MC_MoveRelative
Esempio di diagramma ladder MC_MoveRelative
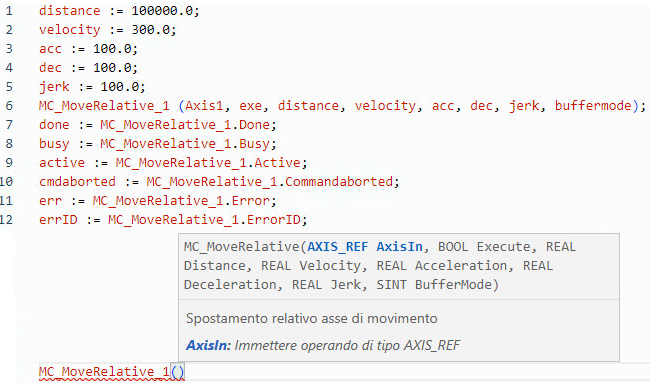
Esempio di testo strutturato MC_MoveRelative
Esempio di risultato MC_MoveRelative

Fornire un feedback