MC_Home (home del controllo movimento)
L'istruzione MC_Home comanda l'asse per l'esecuzione della sequenza
<search home>
. I dettagli della sequenza dipendono dal produttore e possono essere impostati mediante i parametri degli assi. L'ingresso "Position" è usato per impostare la posizione assoluta quando viene rilevato un segnale di riferimento e raggiunto l'offset Azzeramento configurato.Dettagli operazione:
- Dopo l'emissione di MC_Power, lo stato dell'asse Azzerato viene ripristinato a 0 (non azzerato). Nella maggior parte dei casi, dopo che l'asse viene alimentato, il blocco funzione MC_Home deve essere eseguito per calibrare la posizione dell'asse e il riferimento di posizione iniziale.
- Il blocco funzione MC_Home può essere annullato solo utilizzando blocchi funzione MC_Stop o MC_Power. Se viene annullato prima di essere completato, la posizione iniziale precedentemente cercata verrà considerata non valida e lo stato di posizione iniziale dell'asse sarà cancellato.
Lingue supportate: Diagramma a blocchi funzione, Diagramma Ladder, Testo strutturato.
Questa istruzione si applica ai controllori L50E e L70E che supportano il controllo del movimento.
MC_Home
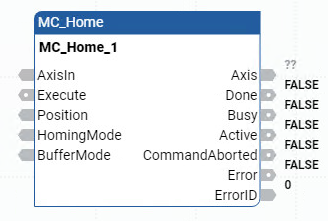
Parametro | Tipo di parametro | Tipo di dati | Descrizione |
|---|---|---|---|
EN | Ingresso | BOOL | Abilitazione del blocco istruzione.
Applicabile solo alle programmazioni in diagramma ladder. |
AxisIn | Ingresso | AXIS_REF | Utilizzare i parametri del tipo di dati AXIS_REF per definire AxisIn. |
Execute | Ingresso | BOOL | Indica quando avviare il movimento.
|
Position | Ingresso | REAL | La posizione assoluta viene impostata quando viene rilevato il segnale di riferimento e raggiunto l'offset della posizione iniziale configurata. L'intervallo di valori per questo ingresso è -0x40000000 – 0x40000000 impulsi fisici, dopo che la posizione è convertita dall'unità di posizione utente all'impulso PTO. Impostare il valore del parametro Position entro Soft Limit. Un valore di ingresso non valido ha generato un errore. ID errore = MC_FB_ERR_PARAM. |
HomingMode | Ingresso | SINT | Ingresso numerale per la modalità Homing. |
BufferMode | Ingresso | SINT | Non utilizzato. La modalità è sempre mcAborting. |
ENO | Uscita | BOOL | Abilita uscita. Applicabile solo alle programmazioni in diagramma ladder. |
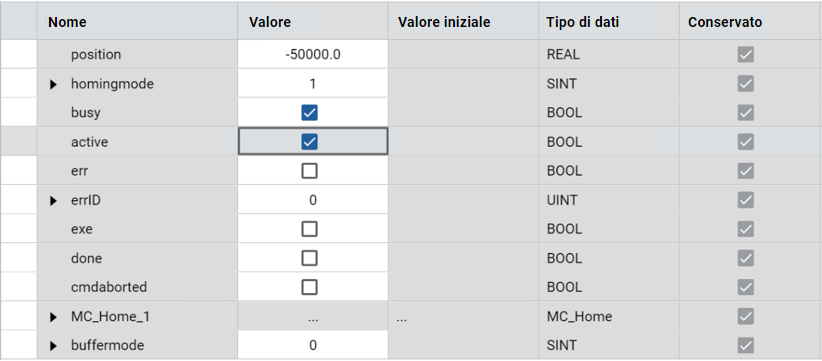
Done | Uscita | BOOL |
|
Busy | Uscita | BOOL |
|
Active | Uscita | BOOL | TRUE: Indica che il blocco istruzione ha il controllo sull'asse. |
CommandAborted | Uscita | BOOL | TRUE: Viene eseguito l'override del comando da parte di un altro comando o Arresto errore. |
Error | Uscita | BOOL | Indica che si è verificato un errore.
|
ErrorID | Uscita | UNIT | Numero univoco che identifica l'errore. Gli errori per questa istruzione sono definiti in ID errori del blocco funzione di controllo movimento . |
Valore | Nome | Descrizione |
|---|---|---|
0x00 | MC_HOME_ABS_SWITCH | Procedura di Homing mediante ricerca dell'interruttore Home Absolute. |
0x01 | MC_HOME_LIMIT_SWITCH | Procedura di Homing mediante ricerca dell'interruttore limite. |
0x02 | MC_HOME_REF_WITH_ABS | Procedura di Homing mediante ricerca dell'interruttore Home Absolute e uso dell'impulso di riferimento encoder. |
0x03 | MC_HOME_REF_PULSE | Procedura di Homing mediante ricerca dell'interruttore limite e uso dell'impulso di riferimento encoder. |
0x04 | MC_HOME_DIRECT | Processo Homing statico con forzatura diretta di una posizione iniziale da riferimento utente. Il blocco funzione imposterà la posizione corrente in cui si trova il meccanismo come posizione iniziale, con la sua posizione determinata dal parametro di ingresso "Position". |
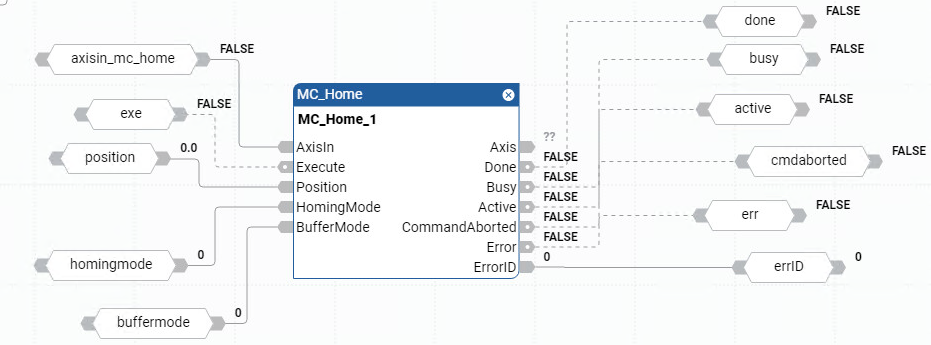
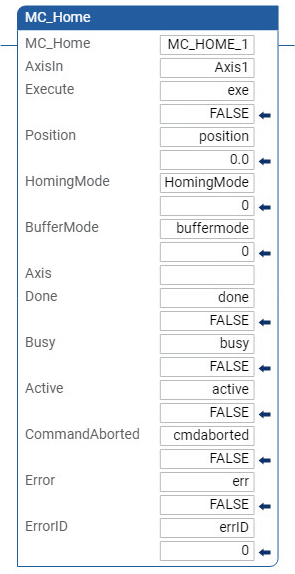
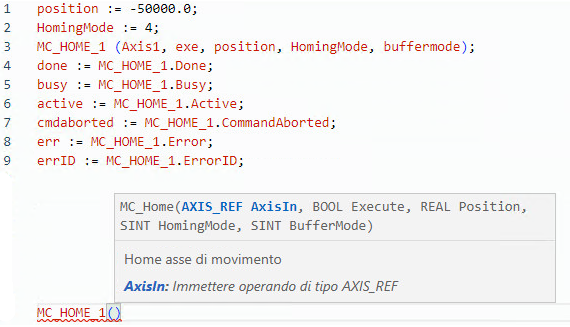
Esempi di MC_Home
Esempi di diagramma a blocchi funzionali MC_Home
Esempio di diagramma ladder MC_Home
Esempio di testo strutturato MC_Home
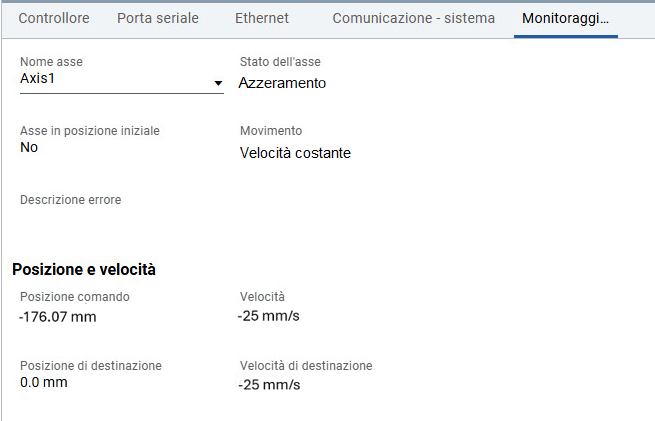
Risultati
Fornire un feedback