MC_Halt (halt di controllo movimento)
L'istruzione MC_Halt comanda un arresto controllato del movimento in condizioni operative normali.
Dettagli operazioni:
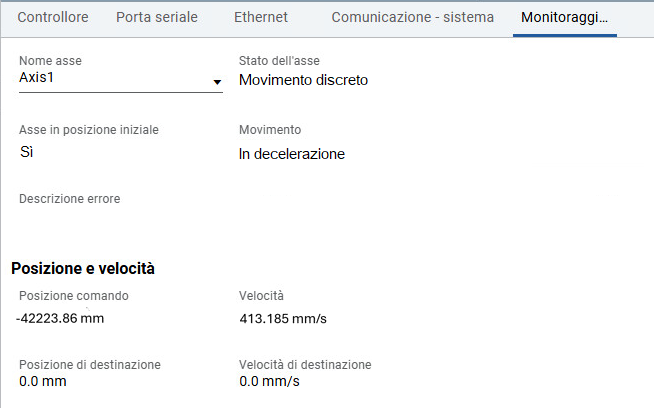
- Lo stato dell'asse passa in movimento discreto, fino a quando raggiunge la velocità zero. Quando la velocità raggiunge lo zero, Done viene impostato su True e lo stato dell'asse cambia a Fermo.
- Durante la decelerazione dell'asse è possibile eseguire un altro comando di controllo assi che esegue l'override di MC_Halt.
- Se MC_Halt viene rilasciato quando lo stato dell'asse è Azzeramento, il blocco funzione riporta un errore e il processo di homing non viene interrotto.
Lingue supportate: Diagramma a blocchi funzione, Diagramma Ladder, Testo strutturato.
Questa istruzione si applica ai controllori L50E e L70E che supportano il controllo del movimento.
MC_Halt
Parametro | Tipo di parametro | Tipo di dati | Descrizione |
|---|---|---|---|
EN | Ingresso | BOOL | Abilitazione del blocco istruzione.
Applicabile alle programmazioni in diagramma ladder. |
AxisIn | Ingresso | AXIS_REF | Utilizzare i parametri del tipo di dati AXIS_REF per definire AxisIn. |
Execute | Ingresso | BOOL | Indica quando avviare il movimento.
L'esecuzione di MC_Halt durante il homing, MC_Halt è impostato su MC_FB_ERR_STATE e il processo di homing continua. |
Deceleration | Ingresso | REAL | Valore della decelerazione (sempre positivo) (energia in riduzione del motore). se Deceleration <= 0 e lo stato dell'asse non è Fermo, MC_Halt è impostato su MC_FB_ERR_RANGE. |
Jerk | Ingresso | REAL | Valore Jerk (sempre positivo). se Deceleration <= 0 e lo stato dell'asse è Fermo, MC_Halt è impostato su MC_FB_ERR_RANGE. |
BufferMode | Ingresso | SINT | Non utilizzato. La modalità è sempre MC_Aborting. |
ENO | Uscita | BOOL | Abilita uscita. Applicabile solo alle programmazioni in diagramma ladder. |
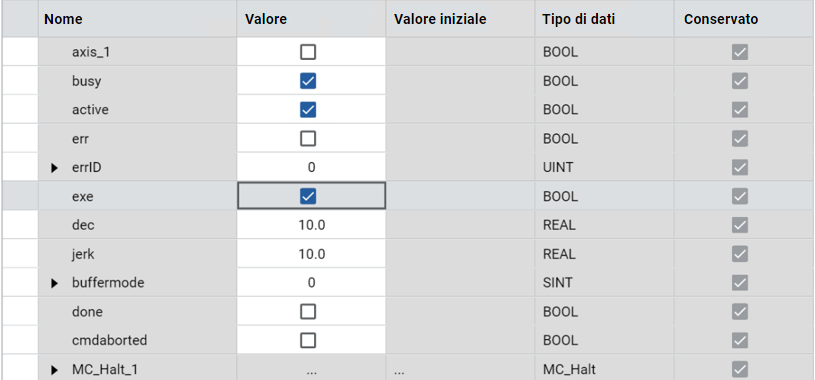
Done | Uscita | BOOL | Raggiungimento della velocità zero. |
Busy | Uscita | BOOL | Il blocco istruzione non è finito. |
Active | Uscita | BOOL | Indica che il blocco istruzione ha il controllo sull'asse. |
CommandAborted | Uscita | BOOL | Viene eseguito l'override del comando da parte di un altro comando o arresto su errore. |
Error | Uscita | BOOL | Indica che si è verificato un errore.
|
ErrorID | Uscita | UINT | Numero univoco che identifica l'errore. Gli errori per questa istruzione sono definiti in ID errori del blocco funzione di controllo movimento. |
Esempi di MC_Halt
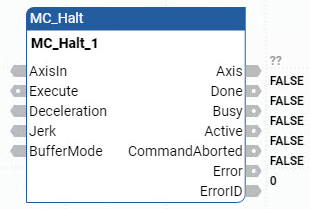
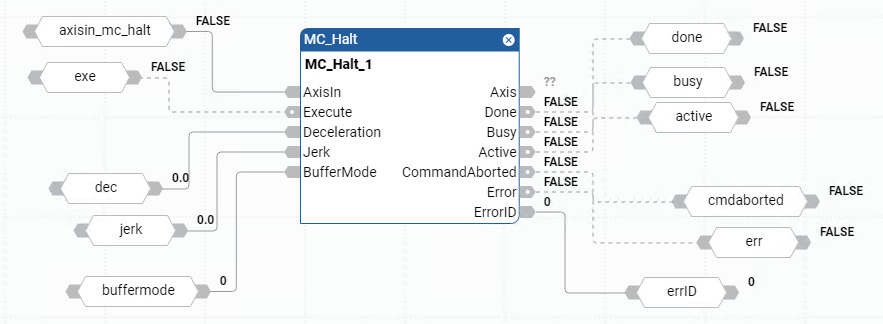
Esempio di diagramma a blocchi funzionali MC_Halt
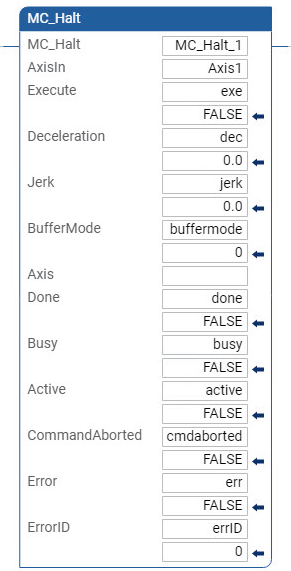
Esempio di diagramma ladder MC_Halt
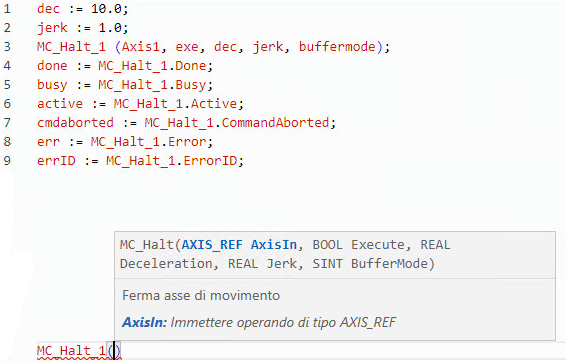
Esempio di testo strutturato MC_Halt
Risultati
Fornire un feedback