IPIDCONTROLLER (proporcional - integral - derivativa - controlador)
Configura y controla las entradas y salidas utilizadas para la lógica proporcional integral derivativa (PID). La lógica PID se utiliza para controlar propiedades físicas, como la temperatura, presión, nivel de líquidos o caudal, usando bucles de proceso que calculan el valor de un error como la diferencia entre un punto de ajuste deseado y una variable de proceso medida. El controlador intenta minimizar el error a lo largo del tiempo mediante el ajuste de una variable de control. El cálculo incluye los términos proporcional (P), integral (I) y derivativa (D), que se utilizan en la siguiente forma:
- P: Valores actuales del error.
- I: Valores anteriores del error.
- D: Posibles valores futuros del error, basados en su actual tasa de cambio, que controla propiedades físicas como la temperatura, la presión, el nivel de líquidos o el caudal, usando bucles de proceso.
Idiomas compatibles: Diagrama de bloque de funciones, diagrama de lógica de escalera y texto estructurado.
Esta instrucción se aplica a los controladores Micro810, L20E, L50E y L70E.
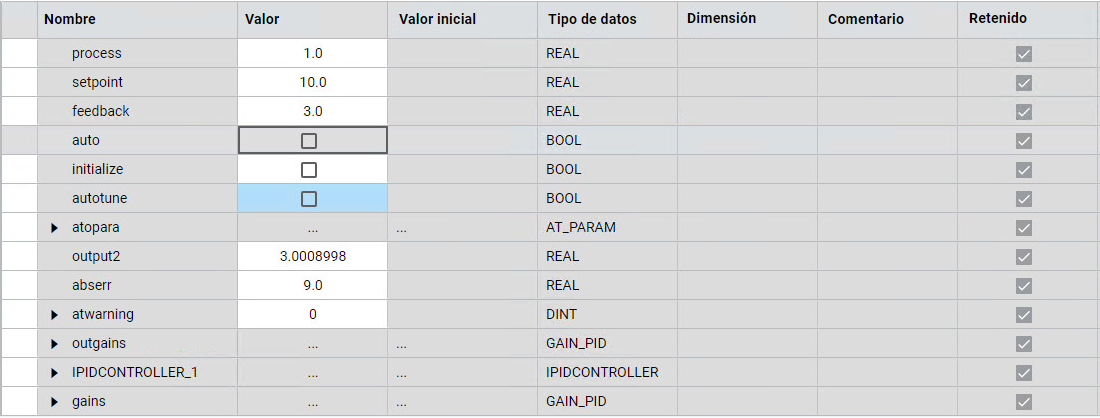
IPIDCONTROLLER
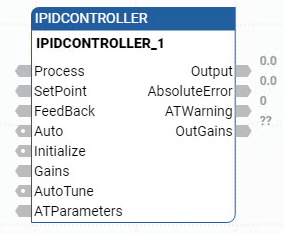
Parámetro | Tipo de parámetro | Tipo de datos | Descripción |
|---|---|---|---|
EN | Entrada | BOOL | Si es Cierto, habilita el bloque de instrucción.
Se aplica a programas de diagrama de lógica de escalera. |
Process | Entrada | REAL | Valor del proceso, que es el valor medido desde la salida del proceso. |
SetPoint | Entrada | REAL | Punto de ajuste. |
FeedBack | Entrada | REAL | Señal de retorno, que es el valor de la variable de control aplicada al proceso. Por ejemplo, el retorno puede ser una salida IPIDCONTROLLER. |
Auto | Entrada | BOOL | El modo de funcionamiento del controlador PID:
|
Initialize | Entrada | BOOL | Un cambio en el valor (Cierto a Falso o Falso a Cierto) hace que el control elimine cualquier ganancia proporcional durante ese ciclo. Además inicializa las secuencias AutoTune. |
Gains | Entrada | GAIN_PID | Ganancias de PID para IPIDController. Utilice el Tipos de datos GAIN_PID para definir los parámetros de la entrada Gains. |
AutoTune | Entrada | BOOL |
|
ATParameters | Entrada | AT_Param | Parámetros Auto Tune. Utilice el Tipos de datos AT_Param para definir los parámetros de la entrada ATParameters. |
Output | Salida | REAL | Valor de salida del controlador. |
AbsoluteError | Salida | REAL | Error absoluto (Process - SetPoint) del controlador. |
ATWarnings | Salida | DINT | (ATWarning) Advertencia de la secuencia de puesta a punto automática. Los valores posibles son:
|
OutGains | Salida | GAIN_PID | Ganancias calculadas tras secuencias de autoajuste. Utilice el tipo de datos GAIN_PID para definir la salida OutGains. |
ENO | Salida | BOOL | Habilita la salida. Se aplica a programas de diagrama de lógica de escalera. |
Ejemplos de IPIDCONTROLLER
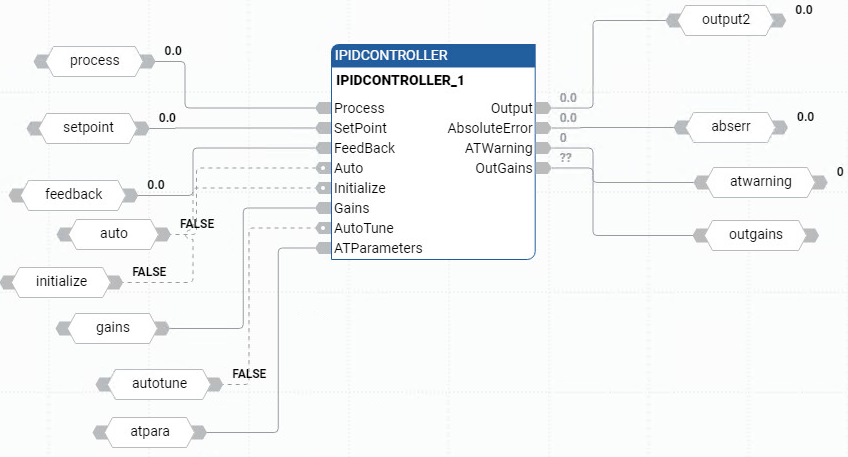
Ejemplo de diagrama de bloque de funciones IPIDCONTROLLER
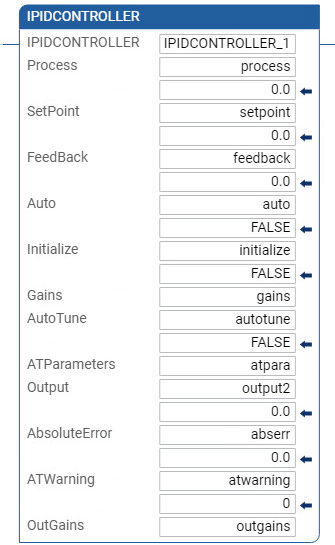
Ejemplo de diagrama de lógica de escalera IPIDCONTROLLER
Ejemplo de texto estructurado IPIDCONTROLLER
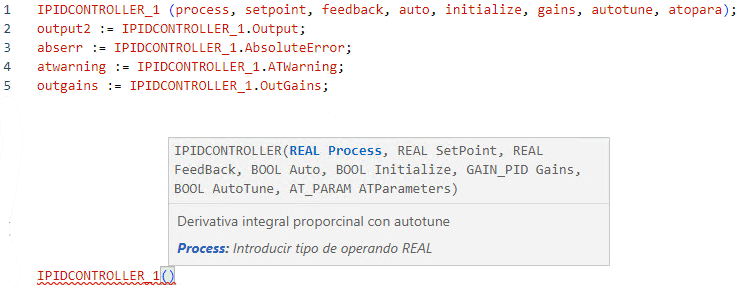
(* ST equivalence: IPIDController1 is an instance of IPIDController block *) IPIDController1(Proc, SP, FBK, Auto, Init, G_In, A_Tune, A_TunePar, Err ); Out_process := IPIDController1.Output ; A_Tune_Warn := IPIDController1.ATWarning ; Gain_Out := IPIDController1.OutGains ;
Resultados
Entregue su opinión