MC_Stop (parada de control de movimiento)
La instrucción MC_Stop ordena una parada de movimiento controlado y cambia el estado del eje a Parando. Se cancelan todas las ejecuciones del bloque de funciones en curso. Todos los comandos de movimiento de bloque de funciones se ignoran hasta que el estado del eje cambia a Atascado.
Detalles de la operación:
- Mientras la entrada Execute sea alta, el eje tendrá el estado Parando. Mientras el eje está en estado Parando, ningún otro bloque de función de movimiento puede ejecutar ningún movimiento en el mismo eje.
- Si la desaceleración es igual a cero, los parámetros de MC_Stop se determinan por el ajuste de parada de emergencia de la configuración del eje, incluyendo el tipo de parada de emergencia, la desaceleración de parada de emergencia y la sacudida de parada de emergencia.
- Si no se detecta ningún error durante la secuencia de parada, el estado del eje cambia a Atascado después de que se active el bit listo y la entrada de Execute se cambie a Falso.
- Utilice MC_Stop como funcionalidad de parada de emergencia o en situaciones excepcionales. Utilice MC_Halt para paradas de movimiento normales.
Idiomas compatibles: Diagrama de bloque de funciones, diagrama de lógica de escalera y texto estructurado.
Esta instrucción se aplica a los controladores L50E y L70E que son compatibles con control de movimiento.
MC_Stop
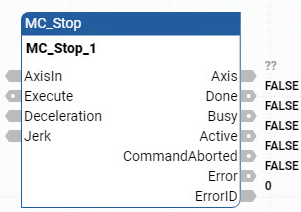
Parámetro | Tipo de parámetro | Tipo de datos | Descripción |
|---|---|---|---|
EN | Entrada | BOOL | Habilitar bloque de instrucción.
Solo se aplica a programas de diagrama de lógica de escalera. |
AxisIn | Entrada | AXIS_REF | Utilice el tipo de datos AXIS_REF para definir los parámetros de AxisIn. |
Execute | Entrada | BOOL |
|
Deceleration | Entrada | REAL | Valor de la desaceleración [u/s 2 ] |
Jerk | Entrada | REAL | Valor de la sacudida [u/s 3 ]。 |
ENO | Salida | BOOL | Habilita la salida. Solo se aplica a programas de diagrama de lógica de escalera. |
Axis | Salida | La salida del eje es de solo lectura en programas de diagrama de lógica de escalera. | |
Done | Salida | BOOL | CIERTO: Se ha alcanzado una velocidad cero sin errores durante la secuencia de parada. |
Busy | Salida | BOOL | CIERTO: El bloque de funciones no ha terminado. |
Active | Salida | BOOL | CIERTO: Indica que el bloque de funciones tiene control en el eje. |
CommandAborted | Salida | BOOL | CIERTO: El bloque de funciones MC_Power(OFF) o Parada de error han anulado el comando. |
Error | Salida | BOOL | Indica que se ha producido un error.
|
ErrorID | Salida | UINT | Un número único que identifica el error. Los errores de esta instrucción se definen en ID de error de bloque de función de control de movimiento. |
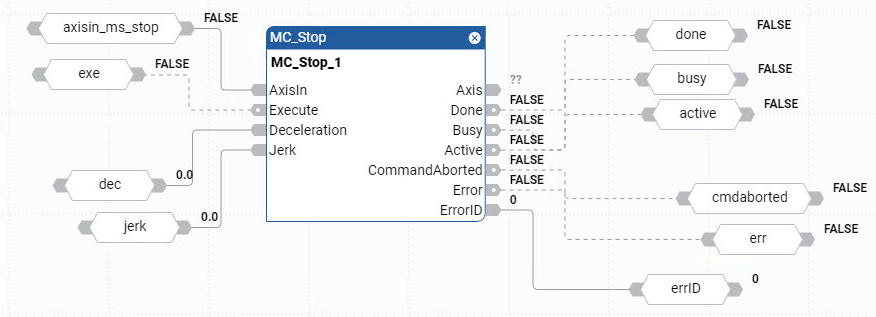
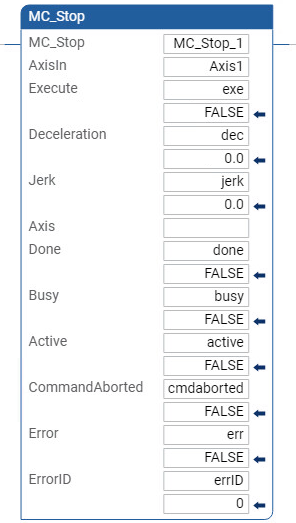
Ejemplos de MC_Stop
Ejemplo de diagrama de bloque de funciones MC_Stop
Ejemplo de diagrama de lógica de escalera MC_Stop
Ejemplo de texto estructurado MC_Stop

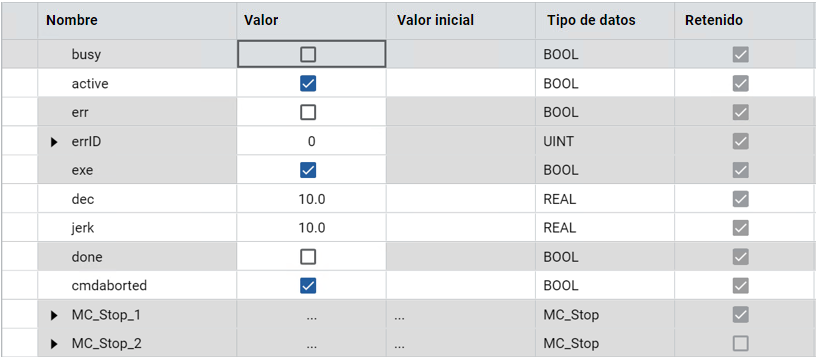
Resultados
Entregue su opinión