MC_SetPosition (posición establecida de control de movimiento)
La instrucción MC_SetPosition cambia el sistema de coordenadas de un eje manipulando la posición real de un eje con el mismo valor, sin causar ningún movimiento.
Detalles de la operación:
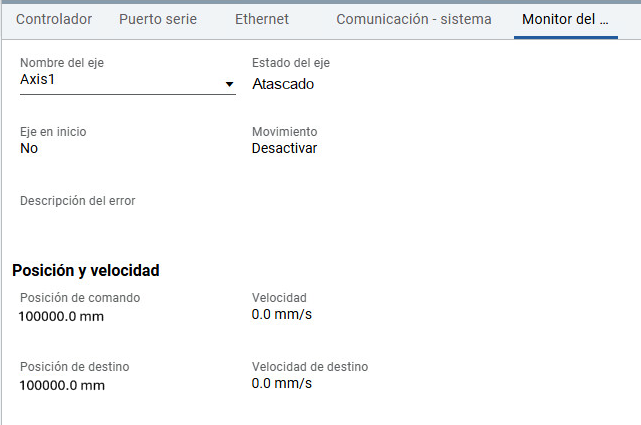
- MC_SetPosition solo se puede completar correctamente si el estado del eje es Atascado o Movimiento continuo (MC_ExecutionMode = 0), o si se completa el movimiento continuo y finaliza con el estado Atascado (MC_ExecutionMode = 1).
- MC_SetPosition funciona de la misma forma que MC_Home si HomingMode = MC_HOME_DIRECT (0x04), salvo que el bloque de funciones MC_Home define el estado de autodirección del eje.
- Si MC_ExecutionMode = 0 (mcImmediately), la ejecución del bloque de funciones MC_SetPosition notifica un error si existe un movimiento continuado y no continuo con el eje.
- Si MC_ExecutionMode = 1 (mcQueued), el ajuste de posición real solo se produce cuando se detiene todo el movimiento continuado anterior. Es decir, cada bloque de función anterior debe tener al menos una de las salidas Listo, Anulado o Error definida a Verdadera.
Idiomas compatibles: Diagrama de bloque de funciones, diagrama de lógica de escalera y texto estructurado.
Esta instrucción se aplica a los controladores L50E y L70E que son compatibles con control de movimiento.
MC_SetPosition
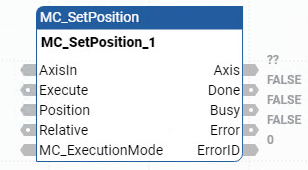
Parámetro | Tipo de parámetro | Tipo de datos | Descripción |
|---|---|---|---|
EN | Entrada | BOOL | Habilitar bloque de instrucción.
Solo se aplica a programas de diagrama de lógica de escalera. |
AxisIn | Entrada | AXIS_REF FB_AXIS_REF | Utilice el tipo de datos AXIS_REF para definir AxisIn. Para FB_Axis (eje de retroalimentación), utilice el Tipos de datos FB_AXIS_REF para definir AxisIn. |
Execute | Entrada | BOOL | CIERTO: Comienza a definir la posición del eje. |
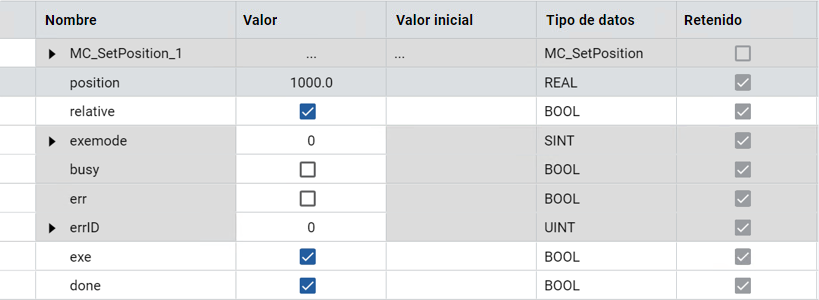
Position | Entrada | REAL | La posición absoluta o distancia relativa que se va a establecer para el eje. |
Relative | Entrada | BOOL |
|
MC_ExecutionMode | Entrada | SINT | Los valores son:
Para (MC_ExecutionMode = 0), este bloque de funciones solo se completa correctamente si el estado del eje es Deshabilitado o Atascado. La ejecución de este bloque de funciones genera un error si se produce un movimiento continuado y no continuo con el eje en este modo. Para (MC_ExecutionMode = 1), este bloque de funciones solo se completa correctamente si el estado del eje es Deshabilitado o Atascado, o si el movimiento continuado se puede completar, lo que finaliza un estado Atascado. El resto de valores de entrada están actualmente reservados y se consideran parámetros no válidos. |
ENO | Salida | BOOL | Habilita la salida. Solo se aplica a programas de diagrama de lógica de escalera. |
Axis | Salida | AXIS_REF | La salida del eje es de solo lectura en programas de diagrama de lógica de escalera. |
Done | Salida | BOOL | CIERTO: La posición tiene un valor nuevo. |
Busy | Salida | BOOL | CIERTO: El bloque de funciones no ha terminado. |
Error | Salida | BOOL | Indica que se ha producido un error.
|
ErrorID | Salida | UINT | Un número único que identifica el error. Los errores de esta instrucción se definen en ID de error de bloque de función de control de movimiento. |
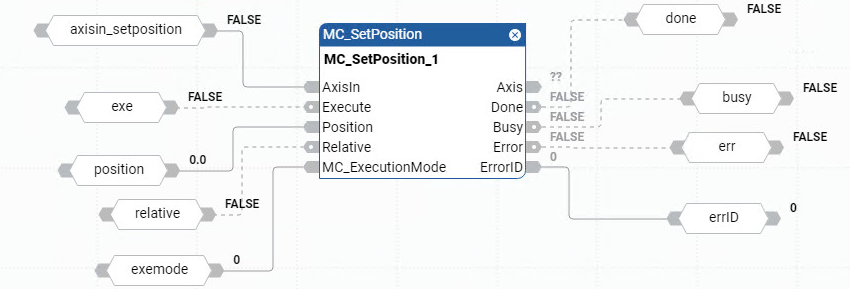
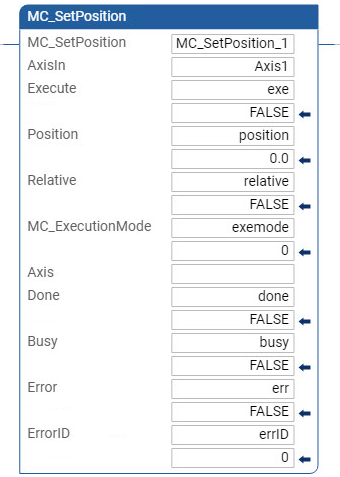
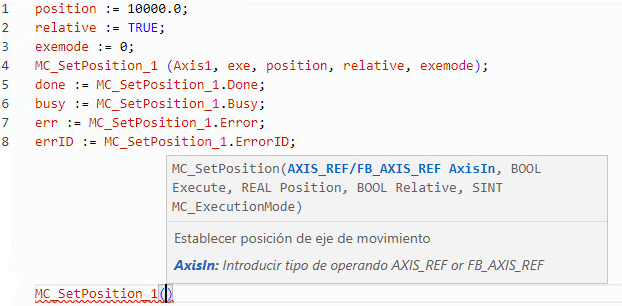
Ejemplos de MC_SetPosition
Ejemplo de diagrama de bloque de funciones MC_SetPosition
Ejemplo de diagrama de lógica de escalera MC_SetPosition
Ejemplo de texto estructurado MC_SetPosition
Resultados
Entregue su opinión