MC_ReadActualPosition (posición real de lectura de control de movimiento)
La instrucción MC_ReadActualPosition devuelve la posición real del eje de retroalimentación. MC_ReadActualPosition solo es aplicable a movimiento de retroalimentación.
Detalles de la operación:
- Antes de ejecutar MC_ReadActualPosition, compruebe que el eje está en uno de los siguientes estados del eje:
- Deshabilitado
- Atascado
- Movimiento discreto
- Parada de error
- La posición real para un eje de retroalimentación no se restablece a 0 tras una descarga. Para restablecer o borrar la posición del eje de retroalimentación, use la instrucción MC_Home o una instrucción MC_SetPosition.
Idiomas compatibles: Diagrama de bloque de funciones, diagrama de lógica de escalera y texto estructurado.
Esta instrucción se aplica a los controladores L50E y L70E que son compatibles con control de movimiento.
MC_ReadActualPosition

Parámetro | Tipo de parámetro | Tipo de datos | Descripción |
|---|---|---|---|
AxisIn | Entrada | FB_AXIS_REF | Para un FB_Axis (eje de retroalimentación), utilice el Tipos de datos FB_AXIS_REF para definir el AxisIn. |
Enable | Entrada | BOOL |
|
Axis | Salida | FB_AXIS_REF | La salida del eje es de solo lectura en programas de diagrama de lógica de escalera. Los parámetros de salida del eje se definen en el tipo de datos FB_AXIS_REF. |
Valid | Salida | BOOL |
|
Busy | Salida | BOOL |
|
Error | Salida | BOOL | Indica que se ha producido un error.
|
ErrorID | Salida | UNIT | Un número único que identifica el error. Los errores de esta instrucción se definen en ID de error de bloque de función de control de movimiento. |
Position | Salida | REAL | El valor de la posición absoluta real para el eje de movimiento de retroalimentación. (en unidades de eje [u]) |
Ejemplos de MC_ReadActualPosition
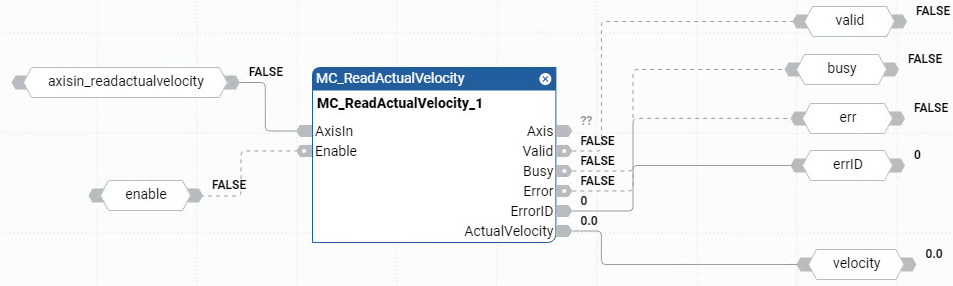
Ejemplo de diagrama de bloque de funciones MC_ReadActualPosition
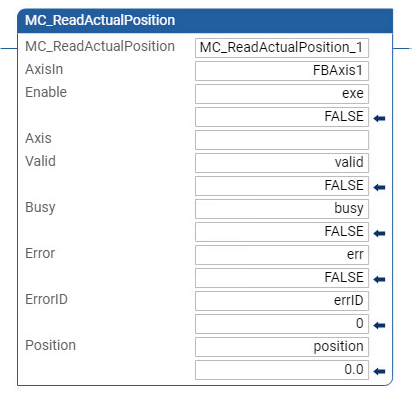
Ejemplo de diagrama de lógica de escalera MC_ReadActualPosition
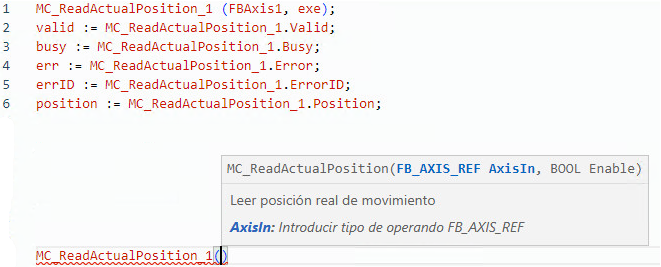
Ejemplo de texto estructurado MC_ReadActualPosition
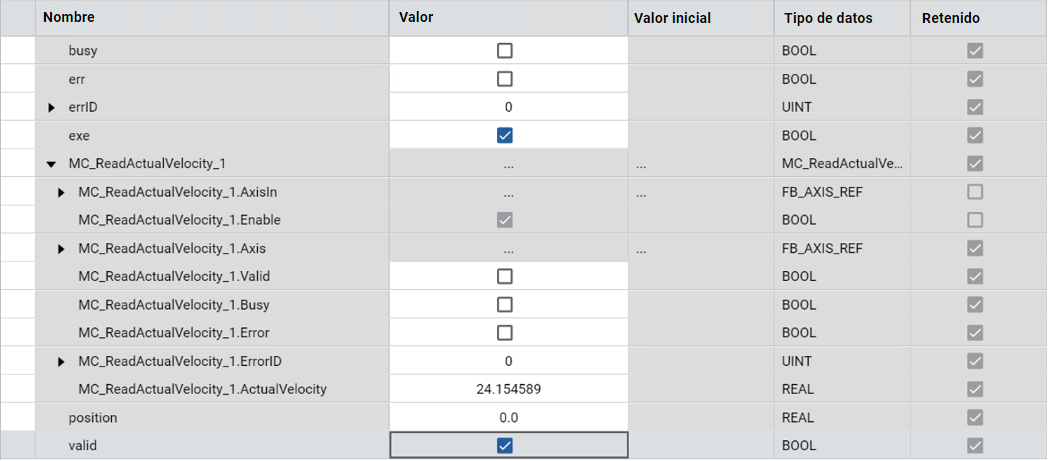
Resultados
Entregue su opinión