MC_MoveVelocity (velocidad de movimiento del control de movimiento)
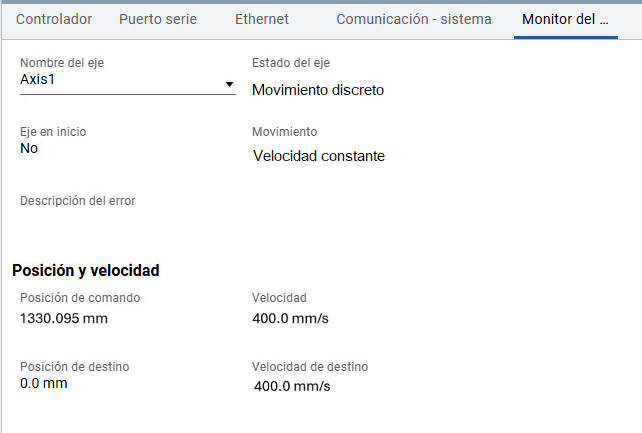
La instrucción MC_MoveVelocity envía un movimiento controlado que nunca finaliza a una velocidad especificada.
Detalles de la operación:
- Si la entrada DirectionIn de MC_MoveVelocity es igual a 0 y:
- El eje no se está en estado de movimiento, se ignora el signo de la entrada Velocity, el eje continúa moviéndose en su dirección actual y se aplican los nuevos parámetros dinámicos.
- El eje no está en estado de movimiento, MC_MoveVolecity genera un error.
- Si se alcanza el límite de pulso PTO durante la ejecución de MC_MoveVelocity, el valor del acumulador PTO se renueva en 0 (o como el límite por software opuesto si se ha activado el límite) y la ejecución continúa.
- Si el eje no se está moviendo y MC_MoveVelocity genera un movimiento en el que la dirección (el signo de Velocity * Direction) es opuesta a la dirección de movimiento actual, MC_MoveVelocity genera un error.
- Una vez definida la señal InVelocity, indica que MC_MoveVelocity se ha completado. Cualquier evento de movimiento posterior no tendrá ningún efecto en las salidas de MC_MoveVelocity, excepto la señal "InVelocity".
- La salida InVelocity de MC_MoveVelocity permanece como Verdadero cuando la velocidad del eje alcanza la velocidad solicitada o hasta que MC_MoveVelocity se detiene.
- El signo de (Velocity * Direction) determina la dirección de movimiento de MC_MoveVelocity. Si velocidad y dirección tienen el mismo signo, se genera un movimiento positivo. Si velocidad y dirección tienen distinto signo, se genera un movimiento negativo.
- La señal "InVelocity" se restablece si otro bloque de funciones o evento de movimiento o el flanco descendente de "Execute" anulan MC_MoveVelocity.
- Para detener o cambiar el movimiento iniciado por MC_MoveVelocity, otro bloque de instrucciones debe interrumpirlo o anularlo, por ejemplo, volviendo a ejecutar MC_MoveVelocity con parámetros diferentes.
- Si se activa MC_MoveVelocity con el estado del eje en Atascado (no controlado por ningún otro bloque de funciones) y se produce un error de bloque de funciones, el estado del eje cambia a Parada de error.
Idiomas compatibles: Diagrama de bloque de funciones, diagrama de lógica de escalera y texto estructurado.
Esta instrucción se aplica a los controladores L50E y L70E que son compatibles con control de movimiento.
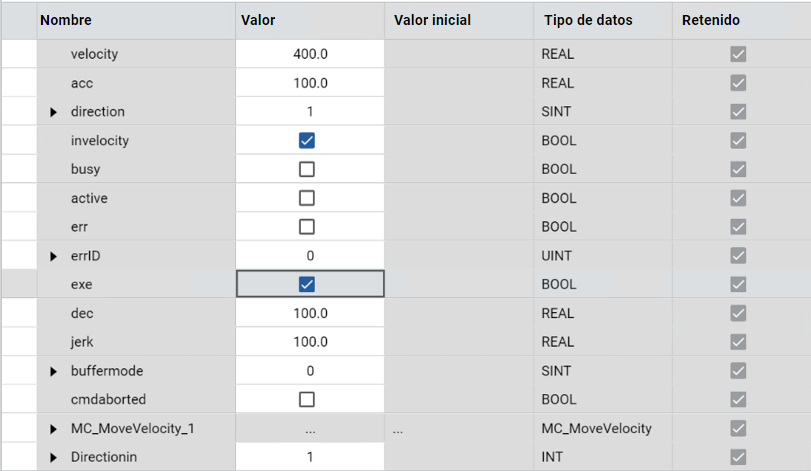
MC_MoveVelocity
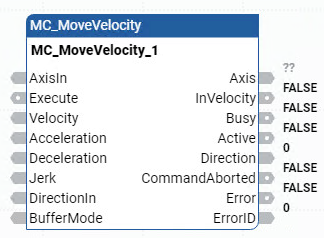
Parámetro | Tipo de parámetro | Tipo de datos | Descripción |
|---|---|---|---|
EN | Entrada | BOOL | Habilitar bloque de instrucción.
Solo se aplica a programas de diagrama de lógica de escalera. |
AxisIn | Entrada | AXIS_REF | Utilice los parámetros de tipo de datos AXIS_REF para definir AxisIn. |
Execute | Entrada | BOOL | Indica cuándo iniciar movimiento.
|
Velocity | Entrada | REAL | Valor de la velocidad máxima [u/s]. |
Acceleration | Entrada | REAL | Valor de la aceleración (aumento de energía del motor) [u/s 2 ] |
Deceleration | Entrada | REAL | Valor de la desaceleración (descenso de energía del motor) [u/s 2 ] |
Jerk | Entrada | REAL | Valor de la sacudida [u/s 3 ] |
DirectionIn | Entrada | SINT | Los valores válidos son: –1, 0, 1. |
BufferMode | Entrada | SINT | Este parámetro no se utiliza. |
ENO | Salida | BOOL | Habilita la salida. Solo se aplica a programas de diagrama de lógica de escalera. |
Axis | Salida | La salida del eje es de solo lectura en programas de diagrama de lógica de escalera. | |
InVelocity | Salida | BOOL | CIERTO: Se ha alcanzado la velocidad comandada (primera vez). |
Busy | Salida | BOOL |
|
Active | Salida | BOOL | CIERTO: Indica que el bloque de funciones tiene control en el eje. |
Direction | Salida | SINT | Los valores válidos son: –1, 0, 1. |
CommandAborted | Salida | BOOL | CIERTO: El comando lo anula otro comando o Parada de error. |
Error | Salida | BOOL | Indica que se ha producido un error.
|
ErrorID | Salida | UINT | Un número único que identifica el error. Los errores de esta instrucción se definen en ID de error de bloque de función de control de movimiento. |
Ejemplos de MC_MoveVelocity
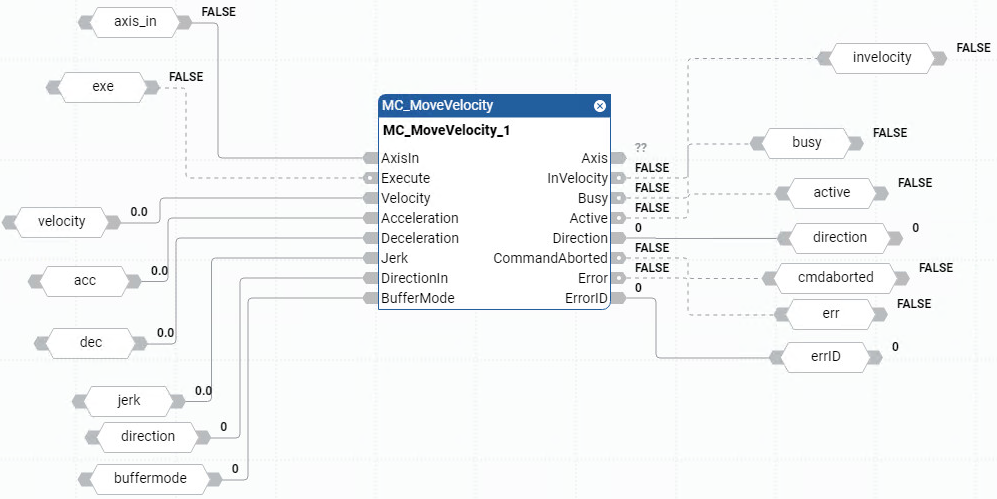
Ejemplo de diagrama de bloque de funciones MC_MoveVelocity
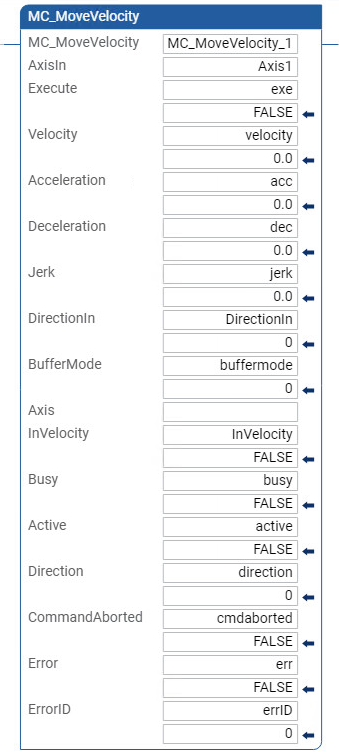
Ejemplo de diagrama de lógica de escalera MC_MoveVelocity
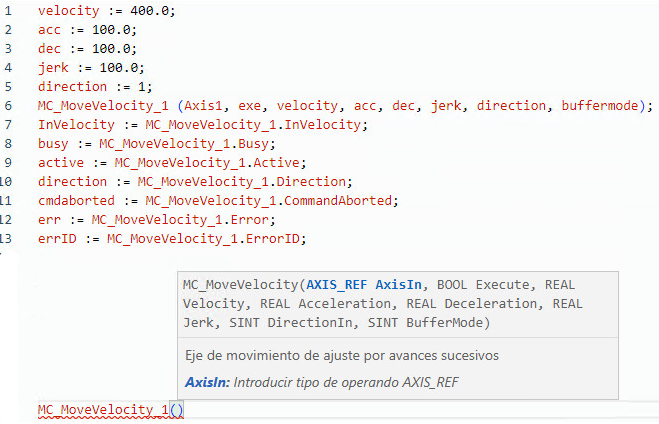
Ejemplo de texto estructurado MC_MoveVelocity
Resultados
Entregue su opinión