MC_MoveRelative (relativo de movimiento del control de movimiento)
La instrucción MC_MoveRelative envía un movimiento controlado a una distancia especificada relativa a la posición actual en el momento de ejecución.
Detalles de la operación:
- Como la dirección del movimiento de MC_MoveRelative se determina por la posición actual y la posición de destino, el signo de Velocity se ignora.
- MoveRelative se completa con una velocidad de cero si no lo anula otro bloque de funciones.
- Si MC_MoveRelative se activa cuando el estado del eje del controladorMicro800es Atascado y la distancia relativa de movimiento es cero, la ejecución del bloque de funciones se notifica inmediatamente como finalizada.
- En el caso de un controladorMicro800, el signo de la entrada Velocity de MC_MoveRelative se ignora porque la dirección de movimiento se determina por la posición actual y la posición de destino.
Idiomas compatibles: Diagrama de bloque de funciones, diagrama de lógica de escalera y texto estructurado.
Esta instrucción se aplica a los controladores L50E y L70E que son compatibles con control de movimiento.
MC_MoveRelative
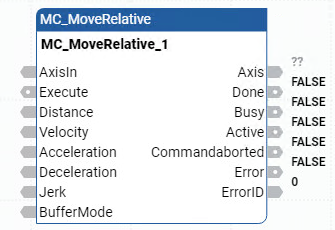
Operación MC_MoveRelative
Parámetro | Tipos de parámetros | Tipos de datos | Descripciones |
|---|---|---|---|
EN | Entrada | BOOL | Habilitar bloque de instrucción.
Solo se aplica a programas de diagrama de lógica de escalera. |
Execute | Entrada | BOOL | Indica cuándo iniciar movimiento.
|
Distance | Entrada | REAL | Distancia relativa del movimiento (en unidad técnica [u]). |
Velocity | Entrada | REAL | Valor de la velocidad máxima (no se alcanza necesariamente) [u/s]. Como la dirección de movimiento viene determinada por la entrada Position, el bloque de funciones ignora el signo de la velocidad. Es posible que la velocidad máxima no se alcance si Sacudida = 0. |
Acceleration | Entrada | REAL | Valor de la aceleración (aumento de energía del motor) [u/s 2 ]. |
Deceleration | Entrada | REAL | Valor de la desaceleración (descenso de energía del motor) [u/s 2 ]. |
Jerk | Entrada | REAL | Valor de la sacudida [u/s 3 ]。 |
BufferMode | Entrada | SINT | Este parámetro no se utiliza. |
ENO | Salida | BOOL | Habilita la salida. Solo se aplica a programas de diagrama de lógica de escalera. |
Axis | Salida | AXIS_REF | La salida del eje es de solo lectura en programas de diagrama de lógica de escalera. |
Done | Salida | BOOL | CIERTO: Distancia de comando alcanzada. Si se habilita la entrada en posición para un eje, la señal en posición se debe definir como activa antes de que Done = Cierto. |
Busy | Salida | BOOL |
|
Active | Salida | BOOL | CIERTO: Indica que el bloque de instrucción tiene control sobre el eje. |
CommandAborted | Salida | BOOL | CIERTO: El comando lo anula otro comando o Parada de error. |
Error | Salida | BOOL | Indica que se ha producido un error.
|
ErrorID | Salida | UINT | Un número único que identifica el error. Los errores de esta instrucción se definen en ID de error de bloque de función de control de movimiento. |
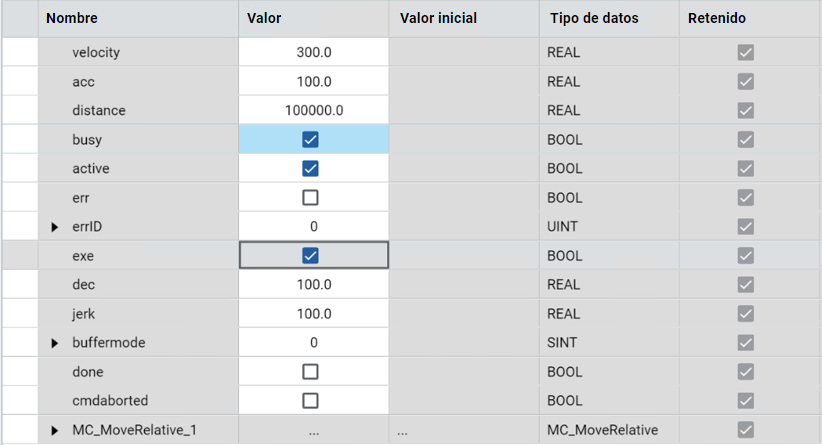
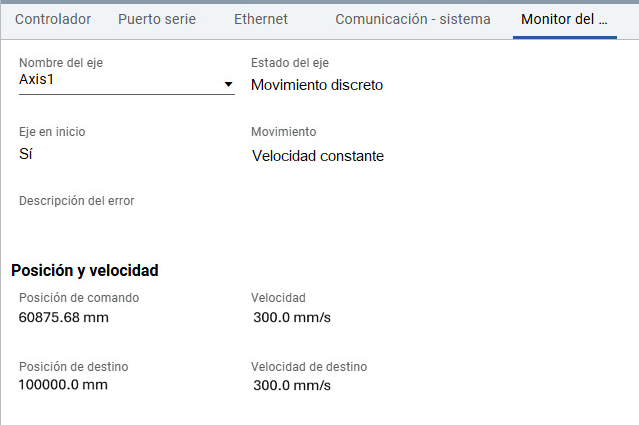
Ejemplos de MC_MoveRelative
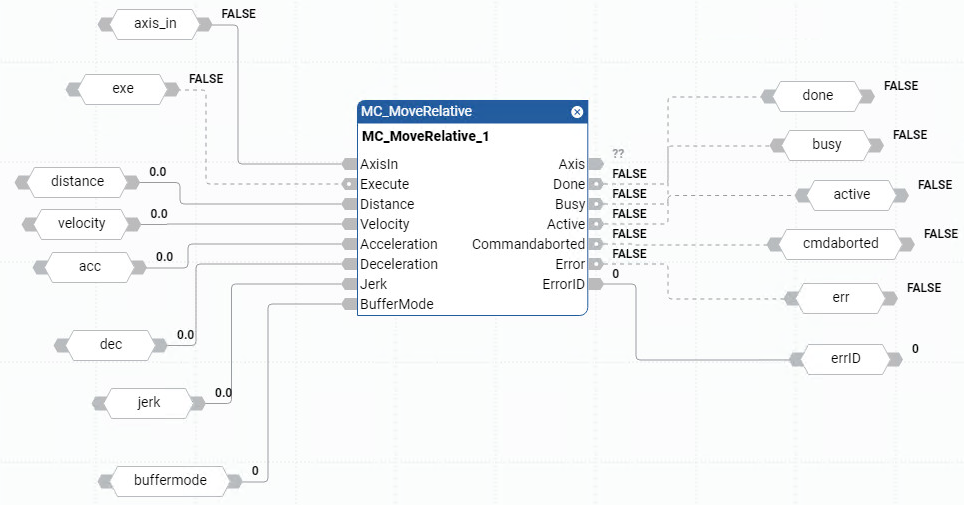
Ejemplo de diagrama de bloque de funciones MC_MoveRelative
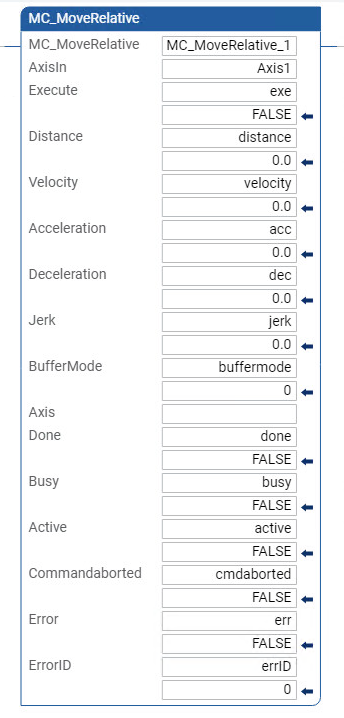
Ejemplo de diagrama de lógica de escalera MC_MoveRelative
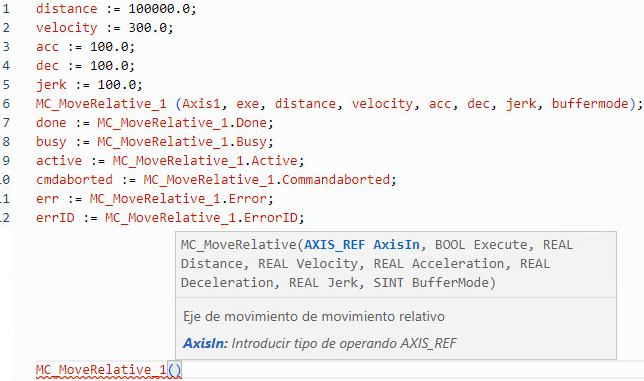
Ejemplo de texto estructurado MC_MoveRelative
Ejemplo de resultados MC_MoveRelative
Entregue su opinión