MC_Home (entrada de control de movimiento)
La instrucción MC_Home ordena al eje que ejecute la secuencia
<search home>
. Los detalles de esta secuencia dependen del fabricante y se pueden definir por los parámetros del eje. La entrada Position se utiliza para definir la posición absoluta cuando se detecta una señal de referencia y se alcanza el offset inicial configurado.Detalles de la operación:
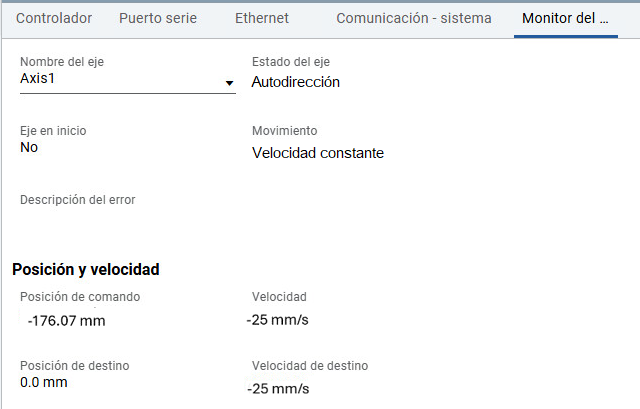
- Después de activarse MC_Power, se restablece el estado de autodirección del eje a 0 (sin autodirección). En la mayoría de los casos, después de que el eje reciba alimentación, el bloque de función MC_Home se debe ejecutar para calibrar la posición del eje y la referencia inicial.
- El bloque de funciones MC_Home solo se puede cancelar mediante un bloque de función MC_Stop o MC_Power. Si se cancela antes de completarse, la posición inicial buscada anteriormente no se considera válida y se elimina el estado inicial del eje.
Idiomas compatibles: Diagrama de bloque de funciones, diagrama de lógica de escalera y texto estructurado.
Esta instrucción se aplica a los controladores L50E y L70E que son compatibles con control de movimiento.
MC_Home
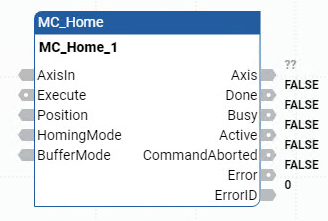
Parámetro | Tipo de parámetro | Tipo de datos | Descripción |
|---|---|---|---|
EN | Entrada | BOOL | Habilitar bloque de instrucción.
Solo se aplica a programas de diagrama de lógica de escalera. |
AxisIn | Entrada | AXIS_REF | Utilice los parámetros de tipo de datos AXIS_REF para definir AxisIn. |
Execute | Entrada | BOOL | Indica cuándo iniciar movimiento.
|
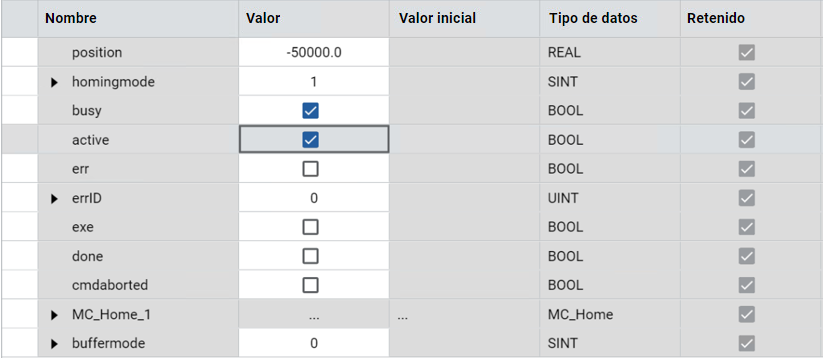
Position | Entrada | REAL | La posición absoluta se define cuando se detecta la señal de referencia y se alcanza el desplazamiento inicial configurado. El rango de valor de esta entrada es -0x40000000 - 0x40000000 pulsos físicos después de convertir la posición de la unidad de posición del usuario a pulso PTO. Defina el valor de posición dentro del límite flexible. Un valor de entrada no válido genera un error. ID de error = MC_FB_ERR_PARAM. |
HomingMode | Entrada | SINT | Entrada de enum. para modo de autodirección. |
BufferMode | Entrada | SINT | No se utiliza. El modo es siempre mcAborting. |
ENO | Salida | BOOL | Habilita la salida. Solo se aplica a programas de diagrama de lógica de escalera. |
Axis | Salida | La salida del eje es de solo lectura en programas de diagrama de lógica de escalera. | |
Done | Salida | BOOL |
|
Busy | Salida | BOOL |
|
Active | Salida | BOOL | CIERTO: Indica que el bloque de instrucción tiene control sobre el eje. |
CommandAborted | Salida | BOOL | CIERTO: El comando lo anula otro comando o Parada de error. |
Error | Salida | BOOL | Indica que se ha producido un error.
|
ErrorID | Salida | UNIT | Un número único que identifica el error. Los errores de esta instrucción se definen en ID de error de bloque de función de control de movimiento. |
Valor | Nombre | Descripción |
|---|---|---|
0x00 | MC_HOME_ABS_SWITCH | Proceso de autodirección buscando el interruptor de posición absoluta de autodirección. |
0x01 | MC_HOME_LIMIT_SWITCH | Proceso de autodirección buscando el interruptor de límite. |
0x02 | MC_HOME_REF_WITH_ABS | Proceso de autodirección buscando el interruptor de posición absoluta de autodirección más el pulso de referencia del codificador. |
0x03 | MC_HOME_REF_PULSE | Proceso de autodirección buscando el interruptor de límite más el pulso de referencia del codificador. |
0x04 | MC_HOME_DIRECT | Proceso de autodirección estático con forzado directo de una posición de autodirección desde la referencia del usuario. El bloque de funciones define la posición actual del mecanismo (determinada por el parámetro de entrada Position) como la de autodirección. |
Ejemplos de MC_Home
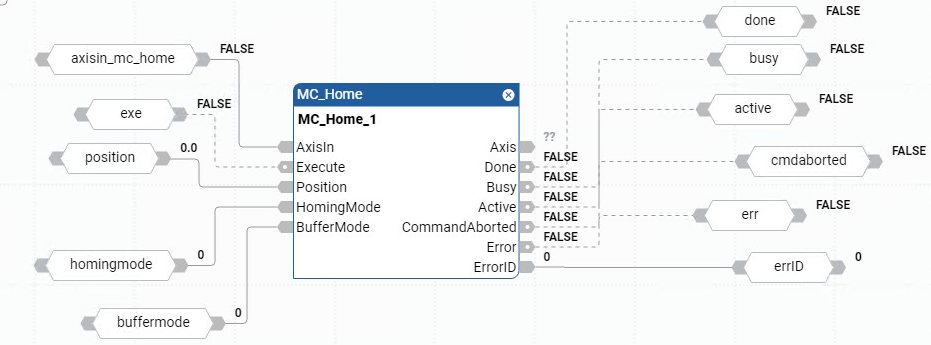
Ejemplo de diagrama de bloque de funciones MC_Home
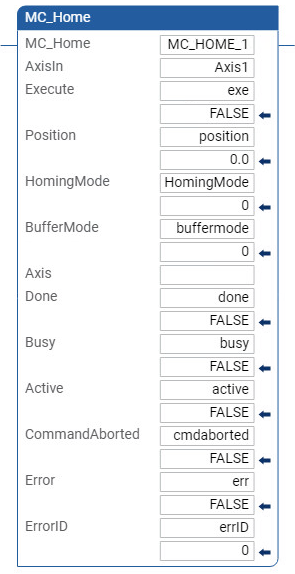
Ejemplo de diagrama de lógica de escalera MC_Home
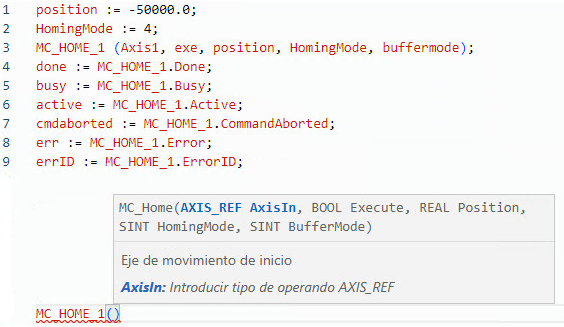
Ejemplo de texto estructurado MC_Home
Resultados
Entregue su opinión