MC_Halt (detención de control de movimiento)
La instrucción MC_Halt ordena una parada de movimiento controlada en condiciones normales de funcionamiento.
Detalles de funcionamiento:
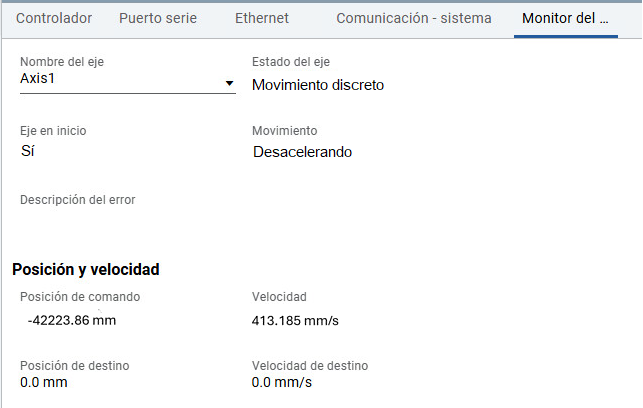
- El estado del eje cambia a Movimiento discreto, hasta que la velocidad sea cero. Cuando la velocidad llegue a cero, Done se define a Cierto y el estado del eje cambia a Atascado.
- Es posible ejecutar otro comando de movimiento durante la desaceleración del eje, lo que provoca la anulación de MC_Halt.
- Si se activa MC_Halt cuando el estado del eje es Autodirección, el bloque de instrucción genera un error y el proceso de autodirección no se interrumpe.
Idiomas compatibles: Diagrama de bloque de funciones, diagrama de lógica de escalera y texto estructurado.
Esta instrucción se aplica a los controladores L50E y L70E que son compatibles con control de movimiento.
MC_Halt
Parámetro | Tipo de parámetro | Tipo de datos | Descripción |
|---|---|---|---|
EN | Entrada | BOOL | Habilitar bloque de instrucción.
Se aplica a programas de diagrama de lógica de escalera. |
AxisIn | Entrada | AXIS_REF | Utilice los parámetros de tipo de datos AXIS_REF para definir AxisIn. |
Execute | Entrada | BOOL | Indica cuándo iniciar movimiento.
Si se ejecuta MC_Halt durante la autodirección, MC_Halt se establece en MC_FB_ERR_STATE y el proceso de autodirección continúa. |
Deceleration | Entrada | REAL | Valor de la desaceleración (siempre positiva: reducción de energía del motor). Si la desaceleración <= 0 y el eje no tiene un estado de Atascado, MC_Halt se define a MC_FB_ERR_RANGE. |
Jerk | Entrada | REAL | Valor de la sacudida (siempre positivo). Si la sacudida < 0 y el eje tiene un estado de atascado, MC_Halt se define a MC_FB_ERR_RANGE. |
BufferMode | Entrada | SINT | No se utiliza. El modo es siempre MC_Aborting. |
ENO | Salida | BOOL | Habilita la salida. Solo se aplica a programas de diagrama de lógica de escalera. |
Axis | Salida | La salida del eje es de solo lectura en programas de diagrama de lógica de escalera. | |
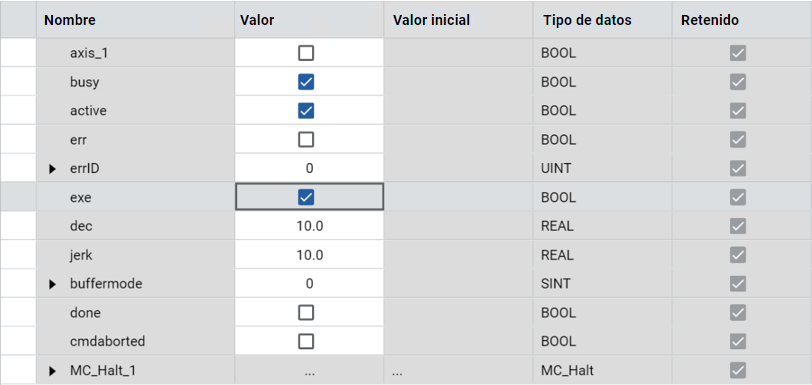
Done | Salida | BOOL | Se ha alcanzado la velocidad de cero. |
Busy | Salida | BOOL | El bloque de instrucción no se ha completado. |
Active | Salida | BOOL | Indica que el bloque de instrucción tiene control sobre el eje. |
CommandAborted | Salida | BOOL | El comando lo anula otro comando o parada de error. |
Error | Salida | BOOL | Indica que se ha producido un error.
|
ErrorID | Salida | UINT | Un número único que identifica el error. Los errores de esta instrucción se definen en ID de error de bloque de función de control de movimiento. |
Ejemplos de MC_Halt
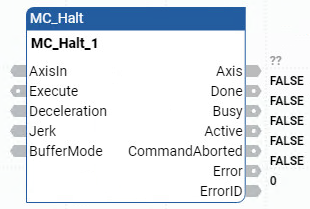
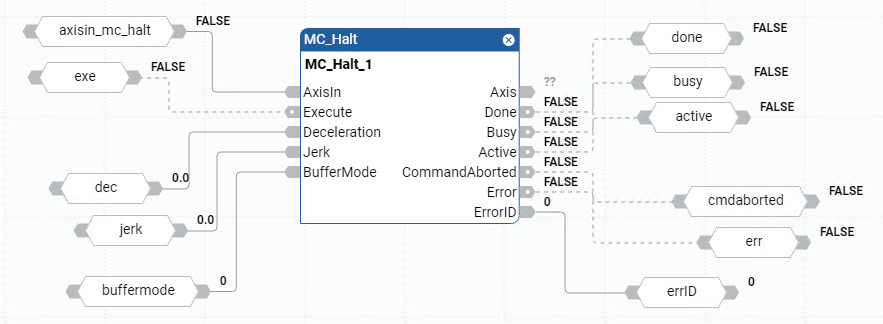
Ejemplo de diagrama de bloque de funciones MC_Halt
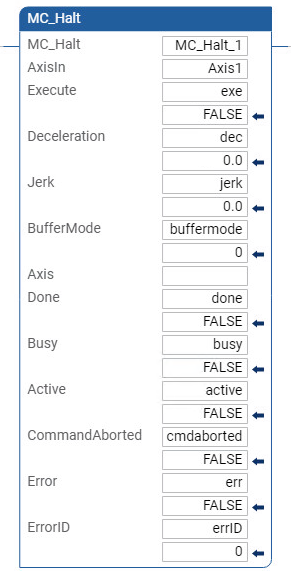
Ejemplo de diagrama de lógica de escalera MC_Halt
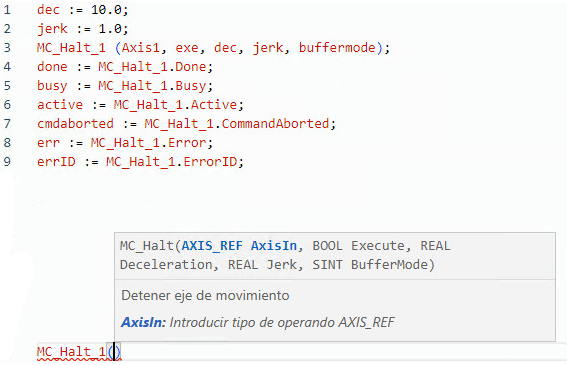
Ejemplo de texto estructurado MC_Halt
Resultados
Entregue su opinión