MC_WriteParameter (parámetro de escritura de control de movimiento)
El parámetro MC_WriteParameter modifica el valor de un parámetro específico del proveedor de tipo REAL.
Los parámetros definidos por el bloque de funciones MC_WriteParameter solo se aplican a la aplicación temporalmente. Se sobrescriben por los ajustes permanentes, que están configurados por el usuario en la configuración de movimiento de
FactoryTalk Design Workbench
, cuando el controlador se cambia de Programa
a Ejecución
, o cuando se desconecta y conecta la alimentación del controlador.Idiomas compatibles: Diagrama de bloque de funciones, diagrama de lógica de escalera y texto estructurado.
Esta instrucción se aplica a los controladores L50E y L70E que son compatibles con control de movimiento.
MC_WriteParameter
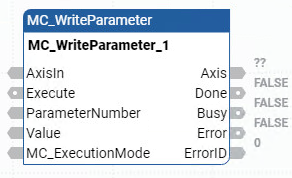
Parámetro | Tipo de parámetro | Tipo de datos | Descripción |
|---|---|---|---|
EN | Entrada | BOOL | Habilitar bloque de instrucción.
Solo se aplica a programas de diagrama de lógica de escalera. |
AxisIn | Entrada | AXIS_REF FB_AXIS_REF | Utilice el Tipos de datos de AXIS_REF para definir los parámetros de AxisIn. Para un eje de retroalimentación, utilice el Tipos de datos FB_AXIS_REF para definir los parámetros de AxisIn. |
Execute | Entrada | BOOL | CIERTO: Escribe el valor del parámetro en el flanco ascendente. |
ParameterNumber | Entrada | DINT | Identificación del parámetro. El número de parámetro se define en Detalles de parámetros de bloques de funciones de control de movimiento. |
Value | Entrada | REAL | Nuevo valor del parámetro especificado. |
MC_ExecutionMode | Entrada | SINT | Los valores son:
Cuando (MC_ExecutionMode = 0), para todos los parámetros excepto Ciclo de servicio (1005), este bloque de funciones solo se puede completar correctamente si el estado del eje Deshabilitado o Atascado. Cuando (MC_ExecutionMode = 0), para el parámetro Ciclo de servicio (1005), este FB se puede completar correctamente, excepto cuando el eje tiene el estado Autodirección o Parada de error. Para (MC_ExecutionMode = 1), este bloque de funciones solo se puede completar correctamente si el estado del eje es deshabilitado o en estancamiento, o si el movimiento continuado se puede completar, finalizado con un estado atascado. El resto de los valores de entrada están actualmente reservados y se consideran parámetros no válidos. |
ENO | Salida | BOOL | Habilita la salida. Solo se aplica a programas de diagrama de lógica de escalera. |
Axis | Salida | AXIS_REF | La salida del eje es de solo lectura en programas de diagrama de lógica de escalera. |
Done | Salida | BOOL | CIERTO: El parámetro se ha escrito correctamente. |
Busy | Salida | BOOL | CIERTO: Indica que el bloque de funciones tiene control del eje. |
Error | Salida | BOOL | Indica que se ha producido un error.
|
ErrorID | Salida | UINT | Un número único que identifica el error. Los errores de esta instrucción se definen en ID de error de bloque de función de control de movimiento. |
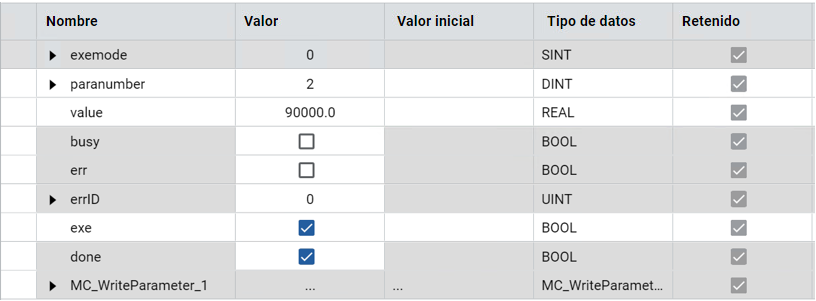
Ejemplos de MC_WriteParameter
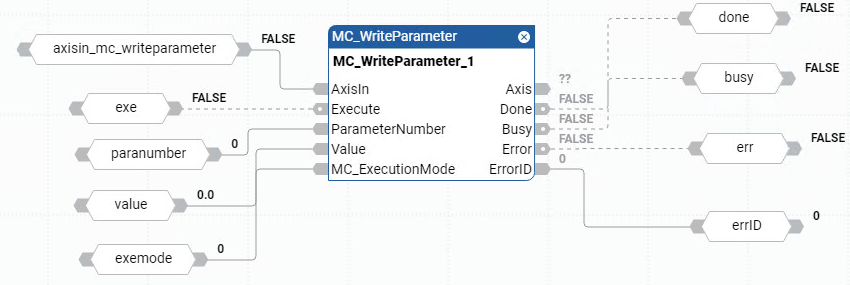
Ejemplo de diagrama de bloque de funciones MC_WriteParameter
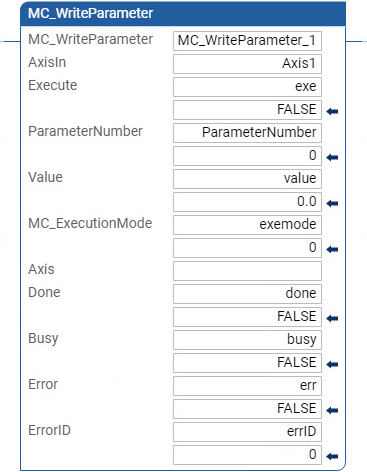
Ejemplo de diagrama de lógica de escalera MC_WriteParameter
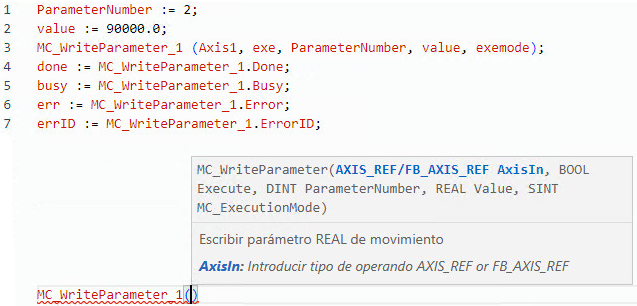
Ejemplo de texto estructurado MC_WriteParameter
Resultados
Entregue su opinión