Diagramas de temporização da instrução PID
Os seguintes exemplos de diagrama de temporização descrevem cenários de execução para a instrução PID.
Execução PID bem sucedida
Execução PID bem sucedida
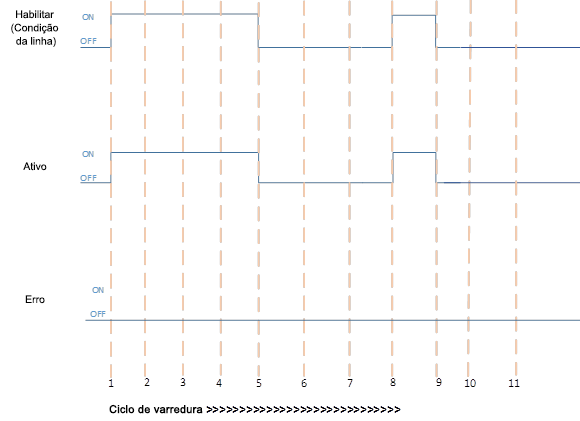
Ciclo de varredura | Descrição |
|---|---|
1, 8 | A condição de linha torna-se TRUE quando:
|
2,3,4 | Nenhuma mudança na condição da linha.
|
5, 9 | A condição da linha torna-se FALSE quando:
|
6, 7, 10, 11 | Nenhuma mudança na condição da linha.
|
Execução de PID com erro
Execução de PID com erro
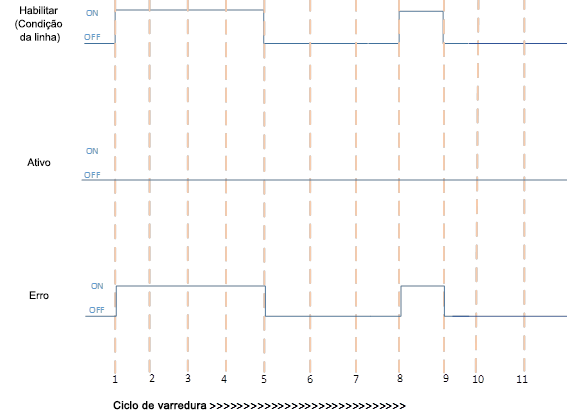
Ciclo de varredura | Descrição |
|---|---|
1, 8 | A condição de linha torna-se TRUE quando:
|
2,3,4 | Nenhuma mudança na condição da linha.
|
5, 9 | A condição da linha torna-se FALSE quando:
|
6, 7, 10, 11 | Nenhuma mudança na condição da linha.
|
Execução de PID com erro e depois com execução bem-sucedida
Execução de PID com erro e depois com execução bem-sucedida
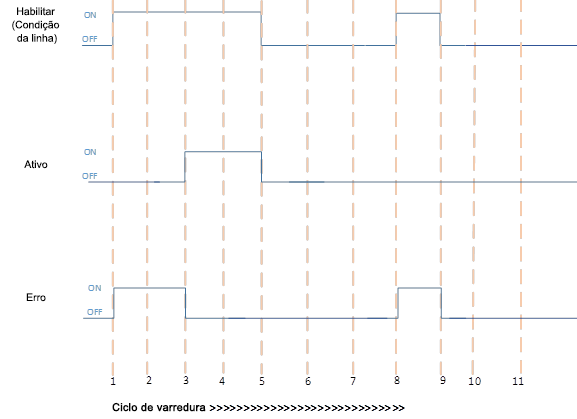
Ciclo de varredura | Descrição |
|---|---|
1, 8 | A condição de linha torna-se TRUE quando:
|
2 | Nenhuma mudança na condição da linha.
|
3, 4 | Nenhuma mudança na condição da linha.
|
5, 9 | A condição da linha torna-se FALSE quando:
|
6, 7, 10, 11 | Nenhuma mudança na condição da linha.
|
Execução de PID com êxito e erro
Execução de PID com êxito e erro
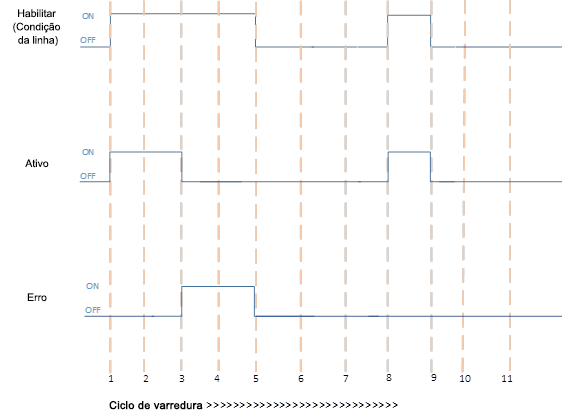
Ciclo de varredura | Descrição |
|---|---|
1, 8 | A condição de linha torna-se TRUE quando:
|
2 | Nenhuma mudança na condição da linha.
|
3, 4 | Nenhuma mudança na condição da linha.
|
5, 9 | A condição da linha torna-se FALSE quando:
|
6, 7, 10, 11 | Nenhuma mudança na condição da linha.
|
Dê sua opinião