PID (proporcional-integral-derivativo)
PID é uma instrução de saída que controla as propriedades físicas, como temperatura, pressão, nível de líquido e taxa de fluxo, usando circuitos do processo.
Detalhes da operação:
- Quando habilitada, a PID controla o processo usando os parâmetros de entrada, incluindo SP e Gains do controlador PID.
- Na transição de Executar para o modo de Programa, a instrução PID é desabilitada, os valores de parâmetro são mantidos.
- Na transição de Programa para o modo de Execução, o PID permanece desabilitado até que um usuário redefina Ativar como true.
Linguagens suportadas: Diagrama de blocos de função, diagrama de ladder, texto estruturado.
Essa instrução aplica-se aos controladores L20E, L50E e L70E.
PID
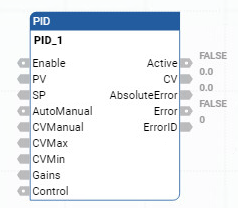
Parâmetro | Tipo do parâmetro | Tipo de dados | Descrição |
|---|---|---|---|
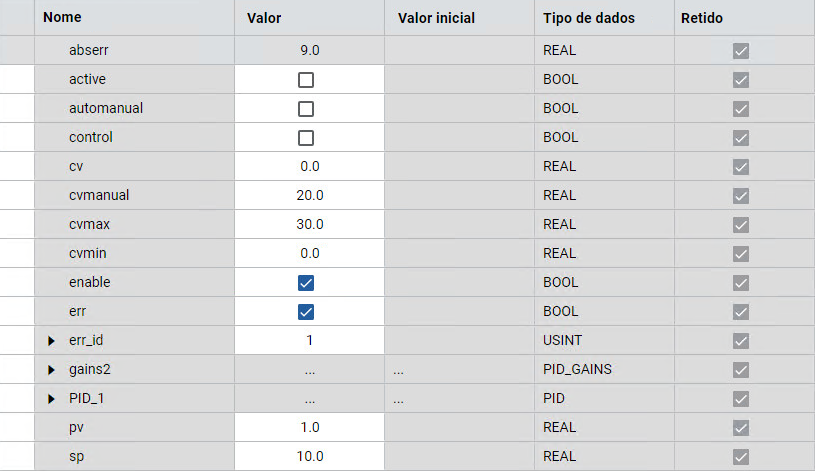
Enable | Entrada | BOOL | Ativar instrução.
|
PV | Entrada | REAL | Valor do processo. Esse valor normalmente é lido de um módulo de entrada analógica. A unidade SI deve ser igual ao ponto de ajuste. |
SP | Entrada | REAL | O valor do ponto de ajuste para o processo. |
AutoManual | Entrada | BOOL | Seleção de modo automático ou manual.
|
CVManual | Entrada | REAL | Entrada de valor de controle definida para operação de modo manual. O intervalo válido para CVManual é: CVMin < CVManual < CVMax. |
CVMin | Entrada | REAL | Limite mínimo do valor de controle.
|
CVMax | Entrada | REAL | Limite máximo do valor de controle.
|
Gains | Entrada | PID_GAINS | Ganhos de PID para o controlador. Use o tipo de dados PID_GAINS para configurar o parâmetro Ganhos. |
Control | Entrada | BOOL | Direção de controle do processo:
|
Active | Saída | BOOL | Status do controlador PID.
|
CV | Saída | REAL | A saída do valor de controle. Se ocorreu algum erro, CV será 0. |
AbsoluteError | Saída | REAL | Erro absoluto é a diferença entre o valor do processo (PV) e o valor do ponto de ajuste (SP). |
Error | Saída | BOOL | Indica a existência de uma condição de erro.
|
ErrorID | Saída | USINT | Um numérico exclusivo que identifica o erro. Os erros são definidos nos códigos de erro PID. |
Parâmetro | Tipo do parâmetro | Tipo de dados | Descrição |
|---|---|---|---|
Kc | Entrada | REAL | Ganho do controlador para PID. Proporcional e Integral são dependentes desse ganho. (>= 0,0001). Aumentar o Kc melhora o tempo de resposta, mas também aumenta a ultrapassagem excessiva e a oscilação do PID. Se Kc for inválido, ocorrerá um erro. |
Ti | Entrada | REAL | Constante integral de tempo em segundos (>= 0,0001). Aumentar o Ti diminui a ultrapassagem excessiva e a oscilação do PID. Se Ti for inválido, ocorrerá um erro. |
Td | Entrada | REAL | Constante derivativa de tempo em segundos (>= 0,0). Quando o Td for igual a 0, não haverá nenhuma ação derivativa e o PID será um controlador PI. Aumentar o Td reduz a ultrapassagem excessiva e remove a oscilação do controlador PID. Se o Td for inválido, ocorrerá um erro. |
FC | Entrada | REAL | Constante de filtro (>= 0,0). O intervalo recomendado para FC é de 0 a 20. O aumento de FC suaviza a resposta do controlador PID. Se FC não for válido, ocorrerá um erro. |
Código de erro | Descrição do Erro |
|---|---|
0 | PID está funcionando normalmente. |
1 | Kc não é válido. |
2 | Ti não é válido. |
3 | Td não é válido. |
4 | FC não é válido. |
5 | CVMin > CVMax ou CVMax < CVMin. |
6 | CVManual < CVMin. CVManual é inválido. |
7 | CVManual > CVMax. CVManual é inválido. |
Exemplos de PID
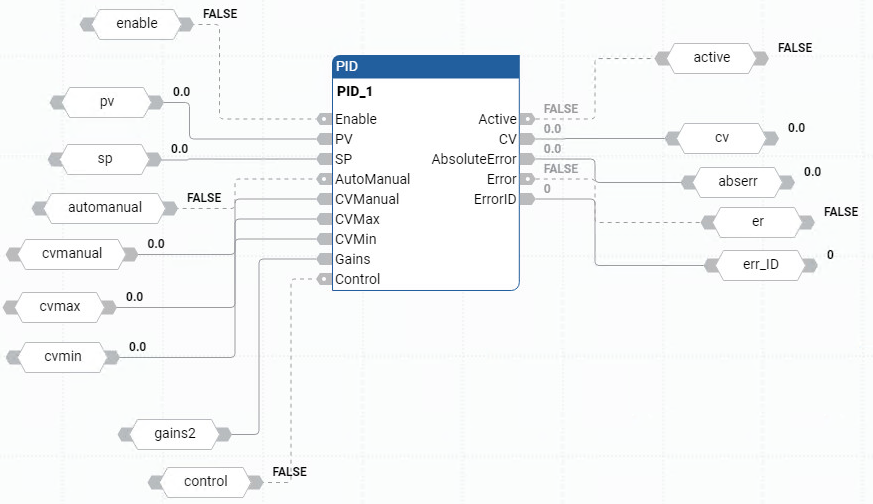
Exemplo de diagrama de blocos de função PID
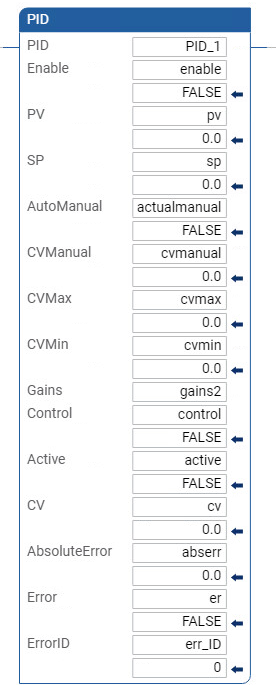
Exemplo de diagrama de ladder PID
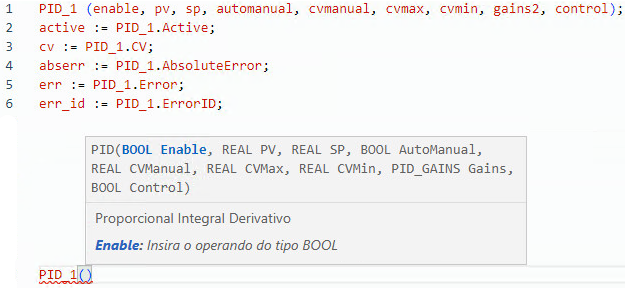
Exemplo de texto estruturado PID
Resultados
Dê sua opinião