작업은 모터용 소프트 스타터를 구매하는 것입니다.
전기 기계식 스타터의 전전압 기동에 비해 간편한 기동을 원합니다. 정격 100HP, FLA 124A, NEMA Design B, KVA Code G의 모터가 있습니다.
모터를 접해본 사람이라면 여기서 특별한 점을 찾지 못할 것입니다. 여기서 멈춰서 이를 기반으로 소프트 스타터를 선택해야 할까요? 꼭 그렇지는 않습니다…
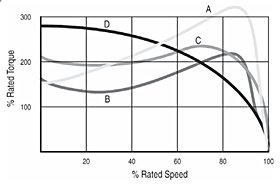
명판에 표시되지 않은 것은 시동 토크의 백분율과 속도-토크 곡선의 일반적인 형태입니다. 이것이 왜 중요할까요? 이는 선택한 소프트 스타터가 실행 가능한지 여부를 결정하는 데 도움이 되기 때문입니다.
지난 몇 년 동안 모터 효율성에 대한 규정으로 인해 모터 특성이 변경되었습니다. 위의 데이터는 과거에는 스타터 선정에 유용했지만, 앞으로는 반드시 충분하지 않을 수 있으며 오래된 모터를 교체할 때 고려해야 합니다.
예를 들어, 가상의 “XYZ” 모터에 대한 데이터 시트를 최근에 살펴보았는데, 모터가 500HP, 8극, NEMA B, Code G라고 명시되어 있었습니다. 좋아 보이고, 이상한 점은 없습니다. 잠긴 로터 토크를 살펴볼 때까지는 말이죠. 90%였습니다. 이것이 소프트 스타터에 적합한 후보일까요?
그럴 수도 있고 아닐 수도 있습니다.
설명드리겠습니다. 모터가 기동되려면 모터 토크가 시동 과정 전체에서 요구되는 부하 토크보다 높아야 합니다. 모터 시동 토크가 요구되는 부하 토크보다 낮으면, 정지 상태나 과부하 트립이 발생하여 모터의 추가적인 열 손상을 방지하게 됩니다. 최종 결과는 시동 실패입니다.
설계상 소프트 스타터는 전압을 이용해 토크를 제어합니다. 사용 가능한 모터 토크는 인가된 전압의 제곱에 대략 비례합니다.
%토크 α %전압2
이러한 관계를 고려할 때, 인가 전압을 60% 감소시키면 발생 토크가 약 84% 감소합니다. 이 예제에서는 40% 전압이 사용됩니다.
(0.4)2= 0.16, 즉 잠긴 로터 토크의 16%가 존재합니다.
따라서 이제 90%의 전체 운전 토크에 비해 잠긴 로터 토크가 있는 속도-토크 곡선을 살펴보십시오. 예제와 같이 전압을 40%로 줄이면 실제 시동 토크의 16%가 됩니다. 이는 매우 낮은 값입니다. 이 값이 모터를 시동하기에 충분할 수도 있고 아닐 수도 있습니다.
이것은 수학에 기반한 예시입니다. 물론, 감소된 전압은 최대 100%까지 조정하여 기동할 수 있습니다. 요점은, 시동 토크 비율이 너무 낮아 토크 여유가 거의 없을 경우 소프트 스타터의 사용 효과가 줄어든다는 것입니다.
가장 일반적으로 사용되는 모터는 NEMA Design B입니다. 많은 기존 NEMA Design B 모터는 전체 운전 토크에 비해 잠긴 로터 토크가 150~250% 이상입니다.
초기 시동 토크가 훨씬 낮은 모터가 이제는 흔히 보입니다. 이는 애플리케이션용 소프트 스타터를 검토할 때 반드시 고려해야 할 사항입니다.