Diagrammi di temporizzazione dell'istruzione PID
Gli esempi di diagramma di temporizzazione seguenti descrivono scenari di esecuzione per l'istruzione PID.
Completamento dell'esecuzione PID.
Completamento dell'esecuzione PID.
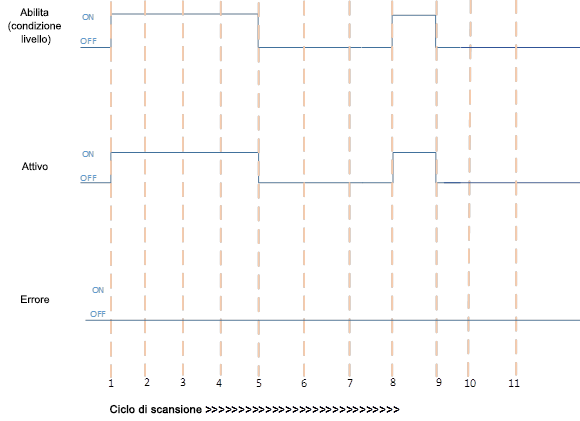
Ciclo di scansione | Descrizione |
|---|---|
1, 8 | La condizione ramo diventa TRUE quando:
|
2, 3, 4 | Nessuna modifica nella condizione ramo.
|
5, 9 | La condizione ramo diventa FALSE quando:
|
6, 7, 10, 11 | Nessuna modifica nella condizione ramo.
|
Esecuzione di PID con errore
Esecuzione di PID con errore
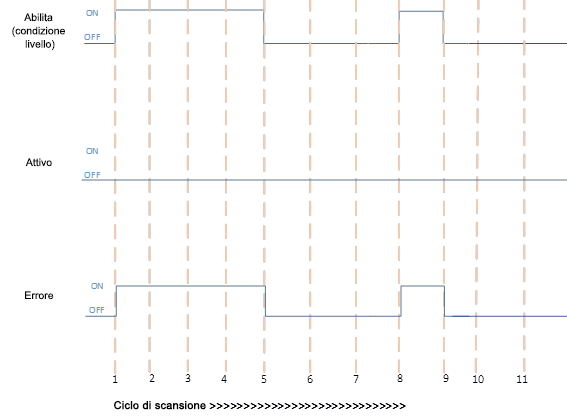
Ciclo di scansione | Descrizione |
|---|---|
1, 8 | La condizione ramo diventa TRUE quando:
|
2, 3, 4 | Nessuna modifica nella condizione ramo.
|
5, 9 | La condizione ramo diventa FALSE quando:
|
6, 7, 10, 11 | Nessuna modifica nella condizione ramo.
|
Esecuzione del PID con errore e completamento dell'esecuzione
Esecuzione del PID con errore e completamento dell'esecuzione
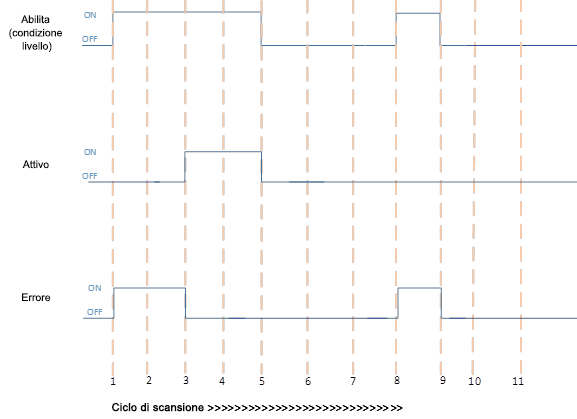
Ciclo di scansione | Descrizione |
|---|---|
1, 8 | La condizione ramo diventa TRUE quando:
|
2 | Nessuna modifica nella condizione ramo.
|
3, 4 | Nessuna modifica nella condizione ramo.
|
5, 9 | La condizione ramo diventa FALSE quando:
|
6, 7, 10, 11 | Nessuna modifica nella condizione ramo.
|
Completamento dell'esecuzione PID ed Errore
Completamento dell'esecuzione PID ed Errore
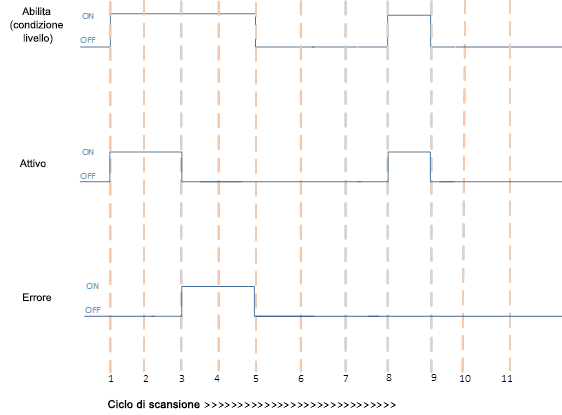
Ciclo di scansione | Descrizione |
|---|---|
1, 8 | La condizione ramo diventa TRUE quando:
|
2 | Nessuna modifica nella condizione ramo.
|
3, 4 | Nessuna modifica nella condizione ramo.
|
5, 9 | La condizione ramo diventa FALSE quando:
|
6, 7, 10, 11 | Nessuna modifica nella condizione ramo.
|
Fornire un feedback