PID (proporzionale integrale derivativa)
PID è un'istruzione di uscita che controlla le proprietà fisiche come la temperatura, la pressione, il livello dei liquidi o la portata tramite cicli di processo.
Dettagli operazione:
- Quando abilitato, PID controlla il processo utilizzando i parametri di ingresso inclusi SP e Guadagni del controllore PID.
- Esegue la transizione dalla modalità Run alla modalità Programmazione, l'istruzione PID è disabilitato, i valori dei parametri vengono memorizzati.
- Esegue la transizione dalla modalità Programmazione alla modalità Run, istruzione PID resta disabilitata fino a quando un utente ripristina da Abilita a True.
Lingue supportate: Diagramma a blocchi funzione, Diagramma Ladder, Testo strutturato.
Questa istruzione vale per i controllori L20E, L50E e L70E.
PID
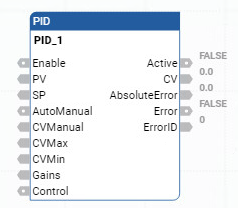
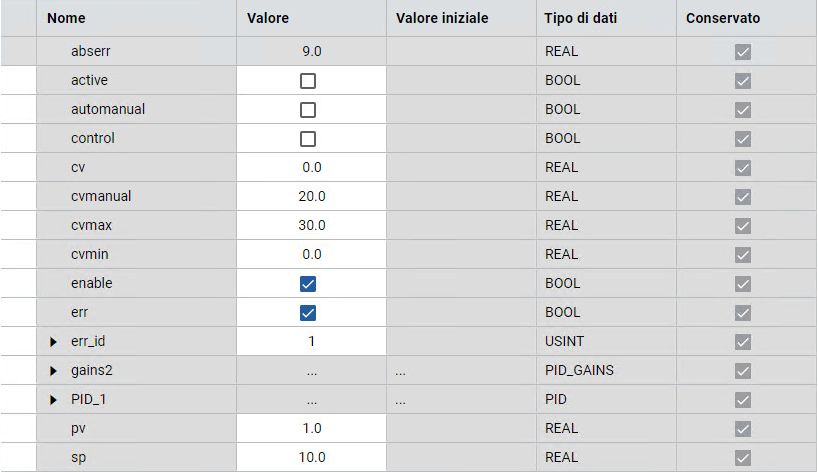
Parametro | Tipo di parametro | Tipo di dati | Descrizione |
|---|---|---|---|
Enable | Ingresso | BOOL | Istruzione Abilita.
|
PV | Ingresso | REAL | Valore processo. Questo valore è in genere letto da un modulo di ingresso analogico. L'unità SI deve essere la stessa di Setpoint. |
SP | Ingresso | REAL | Il valore del punto preimpostato per il processo. |
AutoManual | Ingresso | BOOL | Selezione della modalità automatica o manuale.
|
CVManual | Ingresso | REAL | Ingresso del valore di controllo definito per l'operazione modalità manuale. L'intervallo valido per CVManual è: CVMin < CVManual < CVMax. |
CVMin | Ingresso | REAL | Limite minimo del valore di controllo.
|
CVMax | Ingresso | REAL | Limite massimo del valore di controllo.
|
Gains | Ingresso | PID_GAINS | Guadagni PID per il controllore. Per configurare il parametro Guadagni, utilizzare il tipo di dati PID_GAINS. |
Control | Ingresso | BOOL | Direzione di controllo del processo:
|
Active | Uscita | BOOL | Stato del controllore PID.
|
CV | Uscita | REAL | Uscita del valore di controllo. Se si è verificato un errore, CV è 0. |
AbsoluteError | Uscita | REAL | L'errore assoluto è la differenza tra il valore del processo (PV) e il valore del punto preimpostato (SP). |
Error | Uscita | BOOL | Indica la presenza di una condizione di errore.
|
ErrorID | Uscita | USINT | Numero univoco che identifica l'errore. Gli errori sono definiti nei codici di errore PID. |
Parametro | Tipo di parametro | Tipo di dati | Descrizione |
|---|---|---|---|
Kc | Ingresso | REAL | Guadagno controllore per PID. Proporzionale e integrale dipendono da questo guadagno. (>= 0,0001). L'aumento di Kc migliora il tempo di risposta ma aumenta anche il superamento e oscillazione del PID. Se Kc non è valido, si verifica un errore. |
Ti | Ingresso | REAL | Costante integrale di tempo in secondi (> = 0,0001). L'aumento di Ti diminuisce il superamento e oscillazione del PID. Se Ti non è valido, si verifica un errore. |
Td | Ingresso | REAL | Costante derivativa di tempo in secondi (> = 0,0). Quando Td è uguale 0, non c'è nessuna azione derivata e PID diventa un controllore PI. L'aumento di Td riduce il superamento e rimuove l'oscillazione del controllore PID. Se Td non è valido, si verifica un errore. |
FC | Ingresso | REAL | Costante del filtro (> = 0,0). L'intervallo consigliato per FC è da 0 a 20. L'aumento di FC uniforma la risposta del controllore PID. Se FC non è valido, si verifica un errore. |
Codice errore | Descrizione errore |
|---|---|
0 | PID funziona normalmente. |
1 | Kc non è valido. |
2 | Ti non è valido. |
3 | Td non è valido. |
4 | FC non è valido. |
5 | CVMin > CVMax o CVMax < CVMin. |
6 | CVManual < CVMin. CVManual non è valido. |
7 | CVManual > CVMax. CVManual non è valido. |
Esempi di PID
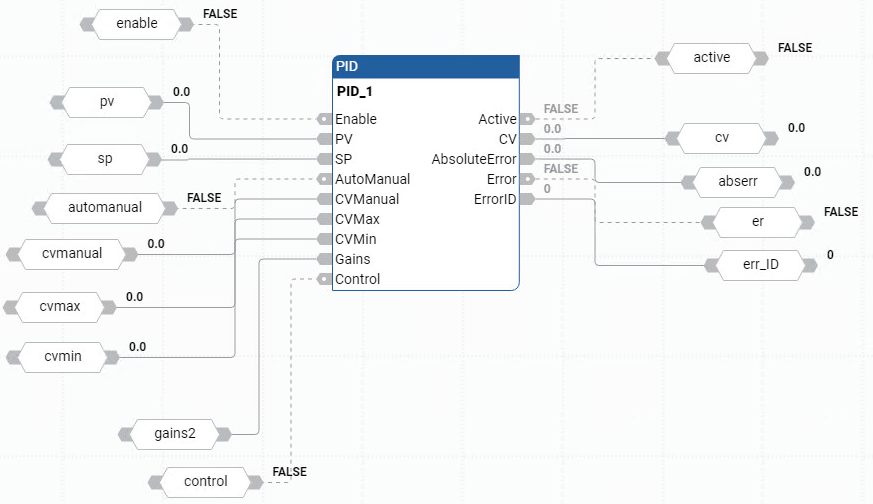
Esempio di Diagramma a blocchi funzione PID
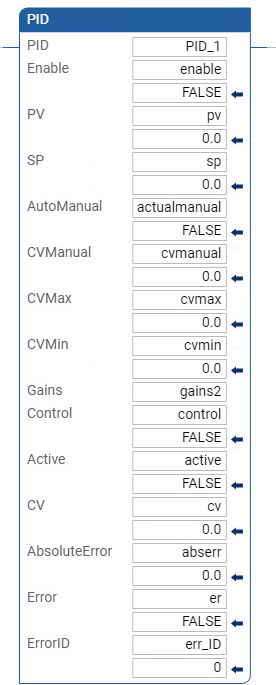
Esempio di Diagramma Ladder PID
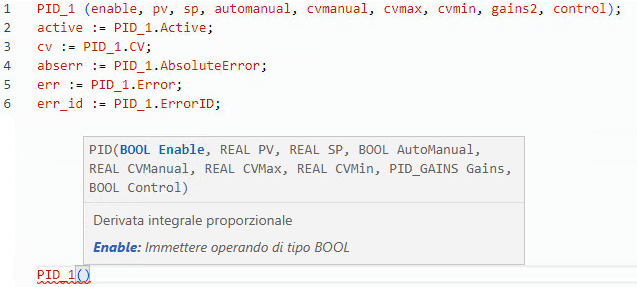
Esempio di Testo strutturato PID
Risultati
Fornire un feedback