Diagramas de temporización de la instrucción PID
Los siguientes ejemplos de diagrama de temporización describen escenarios de ejecución de la instrucción PID.
Ejecución de PID correcta
Ejecución de PID correcta
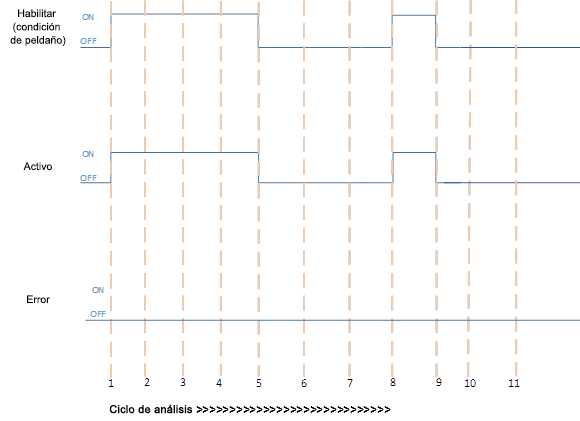
Ciclo de análisis | Descripción |
|---|---|
1, 8 | La condición de línea pasa a ser Cierto cuando:
|
2,3,4 | No hay cambio en la condición de línea.
|
5, 9 | La condición de línea pasa a ser FALSO cuando:
|
6, 7, 10, 11 | No hay cambio en la condición de línea.
|
Ejecución de PID con Error
Ejecución de PID con Error
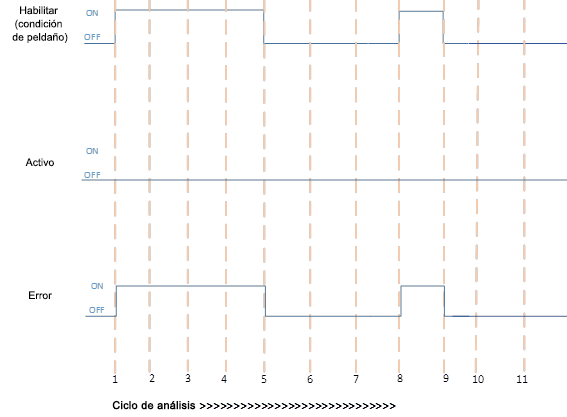
Ciclo de análisis | Descripción |
|---|---|
1, 8 | La condición de línea pasa a ser Cierto cuando:
|
2,3,4 | No hay cambio en la condición de línea.
|
5, 9 | La condición de línea pasa a ser FALSO cuando:
|
6, 7, 10, 11 | No hay cambio en la condición de línea.
|
Ejecución de PID con Error y ejecución correcta
Ejecución de PID con Error y ejecución correcta
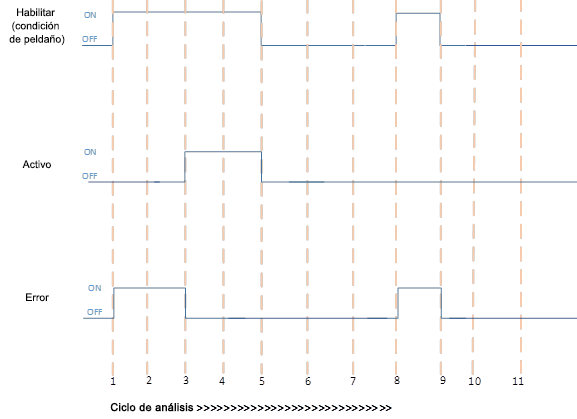
Ciclo de análisis | Descripción |
|---|---|
1, 8 | La condición de línea pasa a ser Cierto cuando:
|
2 | No hay cambio en la condición de línea.
|
3, 4 | No hay cambio en la condición de línea.
|
5, 9 | La condición de línea pasa a ser FALSO cuando:
|
6, 7, 10, 11 | No hay cambio en la condición de línea.
|
Ejecución de PID correcta y Error
Ejecución de PID correcta y Error
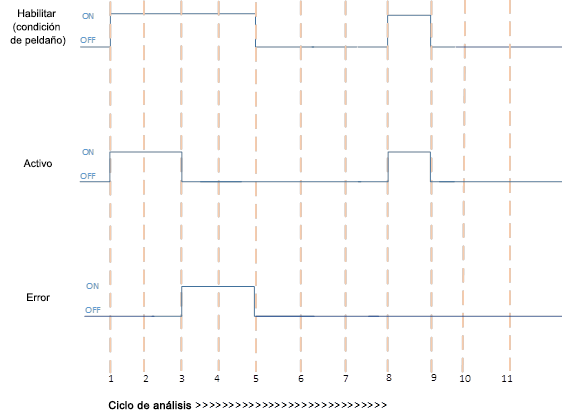
Ciclo de análisis | Descripción |
|---|---|
1, 8 | La condición de línea pasa a ser Cierto cuando:
|
2 | No hay cambio en la condición de línea.
|
3, 4 | No hay cambio en la condición de línea.
|
5, 9 | La condición de línea pasa a ser FALSO cuando:
|
6, 7, 10, 11 | No hay cambio en la condición de línea.
|
Entregue su opinión