PID (proporcional-integral-derivativo)
PID es una instrucción de salida que controla propiedades físicas como la temperatura, la presión, el nivel de líquidos y el caudal, usando bucles de proceso.
Detalles de la operación:
- Si está habilitada, PID controla el proceso utilizando los parámetros de entrada, que incluyen SP y Gains, del controlador PID.
- Transición de modo ejecutar a programa, la instrucción PID está deshabilitada, se conservan los valores del parámetro.
- Transición de modo ejecutar a programa, la instrucción PID se mantiene deshabilitada hasta que un usuario restablece Habilitar como CIERTO.
Idiomas compatibles: Diagrama de bloque de funciones, diagrama de lógica de escalera y texto estructurado.
Esta instrucción se aplica a los controladores L20E, L50E y L70E.
PID
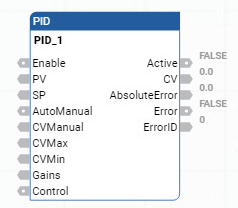
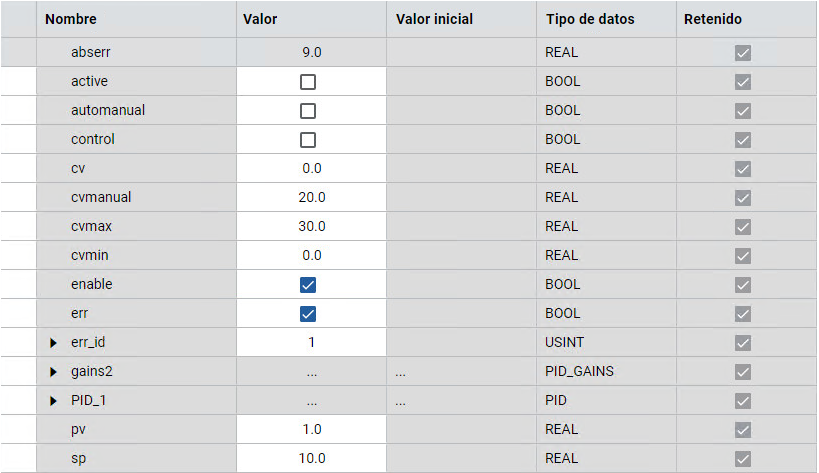
Parámetro | Tipo de parámetro | Tipo de datos | Descripción |
|---|---|---|---|
Enable | Entrada | BOOL | Habilitar instrucción.
|
PV | Entrada | REAL | Valor del proceso. Este valor normalmente se lee desde un módulo de entrada analógica. La unidad SI debe ser la misma que el punto de ajuste. |
SP | Entrada | REAL | El valor de punto de ajuste para el proceso. |
AutoManual | Entrada | BOOL | Selección de modo automático o manual.
|
CVManual | Entrada | REAL | Entrada de valor de control definida para la operación de modo manual. El intervalo válido para CVManual es: CVMin < CVManual < CVMax. |
CVMin | Entrada | REAL | Límite mínimo del valor de control.
|
CVMax | Entrada | REAL | Límite máximo del valor de control.
|
Gains | Entrada | PID_GAINS | Ganancias para control PID. Utilice el tipo de datos PID_GAINS para configurar el parámetro Gains. |
Control | Entrada | BOOL | Dirección de control del proceso:
|
Active | Salida | BOOL | Estado del controlador PID.
|
CV | Salida | REAL | El valor de salida de control. Si se ha producido un error, CV es 0. |
AbsoluteError | Salida | REAL | Error absoluto es la diferencia entre el valor de procesamiento (PV) y el valor de punto de ajuste (SP). |
Error | Salida | BOOL | Indica la existencia de una condición de error.
|
ErrorID | Salida | USINT | Un número único que identifica el error. Los errores se establecen en los códigos de estado PID. |
Parámetro | Tipo de parámetro | Tipo de datos | Descripción |
|---|---|---|---|
Kc | Entrada | REAL | Ganancia del controlador para PID. Proporcional e Integral dependen de esta ganancia. (>= 0,0001). Aumentar Kc mejora el tiempo de respuesta, pero también aumenta el rebasamiento y la oscilación de PID. Si Kc no es válido, se produce un error. |
Ti | Entrada | REAL | Constante integral de tiempo en segundos (> = 0,0001). Aumentar Ti disminuye el rebasamiento y la oscilación de PID. Si Ti no es válido, se produce un error. |
Td | Entrada | REAL | Constante derivativa de tiempo en segundos (> = 0,0). Cuando Td es igual a 0, no hay ninguna acción derivativa y PID pasa a ser un controlador de PI. Aumento de Td reduce el rebasamiento y elimina la oscilación del controlador PID. Si Td no es válido, se produce un error. |
FC | Entrada | REAL | Constante de filtro (> = 0,0). El intervalo recomendado para FC es 0 a 20. Aumentar FC suaviza la respuesta del controlador PID. Si FC no es válido, se produce un error. |
Código de error | Descripción del error |
|---|---|
0 | PID funciona con normalidad. |
1 | Kc no es válido. |
2 | Ti no es válido. |
3 | Td no es válido. |
4 | FC no es válido. |
5 | CVMin > CVMax o CVMax < CVMin. |
6 | CVManual < CVMin. CVManual no es válido. |
7 | CVManual > CVMax. CVManual no es válido. |
Ejemplos de PID
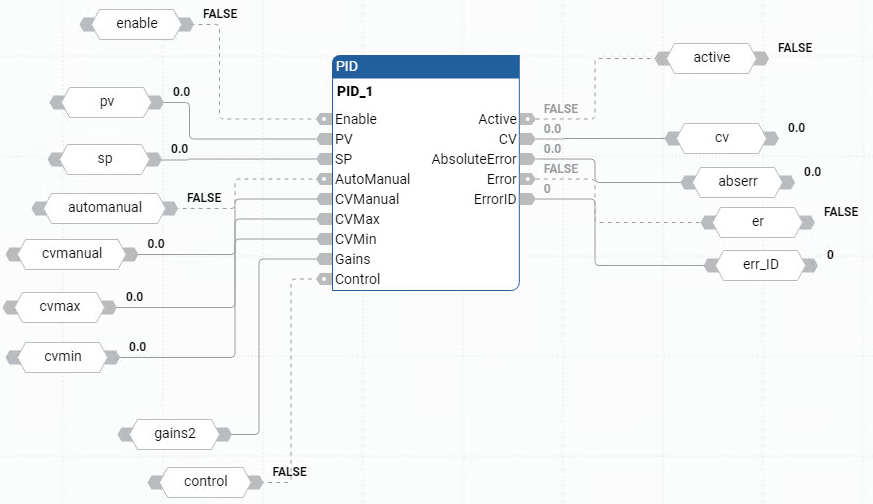
Ejemplo de diagrama de bloque de funciones PID
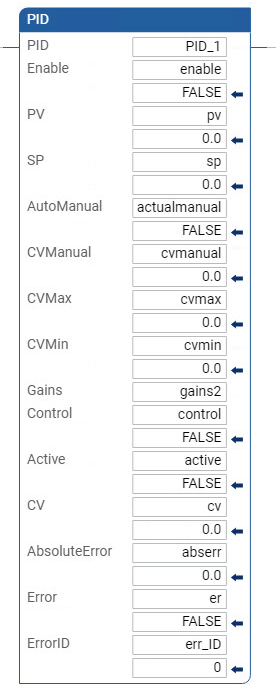
Ejemplo de diagrama de lógica de escalera PID
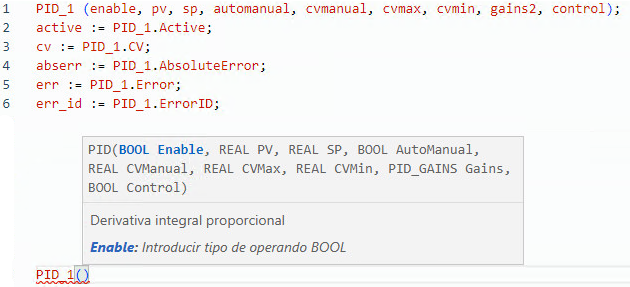
Ejemplo de texto estructurado PID
Resultados
Entregue su opinión