INTEGRAL
La instrucción INTEGRAL integra un valor real durante el ciclo de tiempo definido.
- Cuando se inicia por primera vez el bloque de funciones INTEGRAL, sus valores iniciales no se consideran. Utilice el parámetro R1 para definir los valores iniciales del cálculo.
- Para evitar la pérdida de un valor integrado, el valor de integración no se elimina automáticamente si el controlador cambia deProgramaaEjecucióno si el parámetro Run cambia de FALSO a CIERTO. Use el parámetro R1 para borrar el valor integral cuando el controlador cambie por primera vez de modoProgramaaEjecucióny cuando comience una nueva integración.
- No se recomienda utilizar los parámetros opcionales EN o ENO con este bloque de funciones porque el cálculo de tiempo de ciclo se interrumpe cuando EN es FALSO, lo que da lugar a una integración incorrecta. Si decide utilizar los parámetros EN o ENO, alterne el parámetro R1 con EN igual a Cierto para eliminar el resultado actual y garantizar una integración correcta.
- La integración se realiza con una base temporal de milisegundos (es decir, la integración de una entrada de 1 con un valor inicial de 0 para 1 segundo da como resultado un valor de 1.000). Para convertir la salida de la instrucción a unidades de segundos, divida la salida por 1000.
- Si el valor del parámetro CYCLE es inferior a la temporización del ciclo de la ejecución del dispositivo, el período de muestra se fuerza a esta temporización de ciclo.
- Las muestras XIN y las ejecuciones del bloque de funciones se producen en cada temporización de ciclo + jitter de tiempo de exploración.
- Para un programa de usuario concreto, el jitter de tiempo de exploración varía en función de cada controlador.
- El tiempo de ciclo determina la sensibilidad del bloque de funciones Integral. Los cambios que se producen en XIN entre dos muestras (o en el tiempo de ciclo) no se tienen en cuenta cuando se calcula el valor de XOUT integral.
- El tiempo de ciclo y el jitter de tiempo de exploración contribuyen a la imprecisión global de la salida Integral, tal y como se muestra en el ejemplo de XIN en sincronización con la ejecución de un bloque de funciones y el ejemplo de XIN sin sincronización con una ejecución de un bloque de funciones.
Idiomas compatibles: Diagrama de bloque de funciones, diagrama de lógica de escalera y texto estructurado.
Esta instrucción se aplica a los controladores Micro810, L20E, L50E y L70E.
INTEGRAL
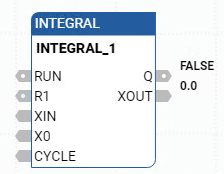
Parámetro | Tipo de parámetro | Tipo de datos | Descripción |
|---|---|---|---|
RUN | Entrada | BOOL | Modo:
|
R1 | Entrada | BOOL | Restablecimiento de la anulación. |
XIN | Entrada | REAL | Entrada: Cualquier valor real. |
X0 | Entrada | REAL | Valor inicial. |
CYCLE | Entrada | TIME | Periodo de muestra. Los valores posibles van desde 0 ms hasta 49d17h2m47s294ms. |
Q | Salida | BOOL | No R1. |
XOUT | Salida | REAL | Salida integrada. |
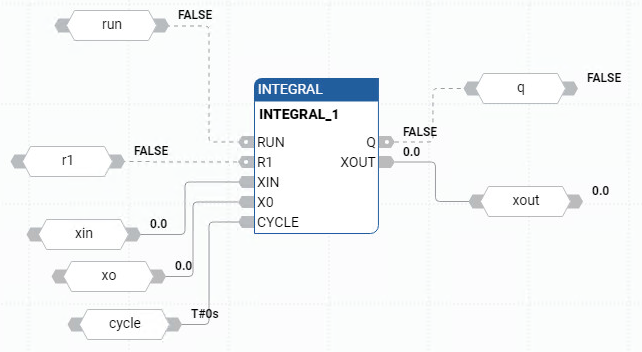
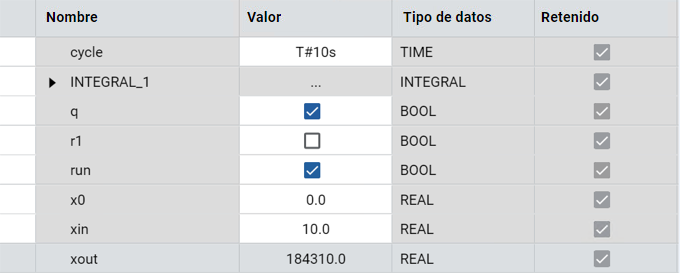
Ejemplos de INTEGRAL
Ejemplo de diagrama de bloque de funciones INTEGRAL
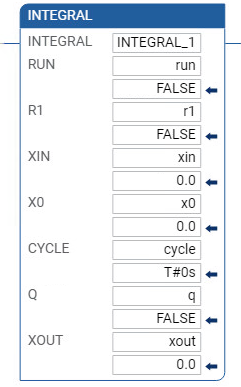
Ejemplo de diagrama de lógica de escalera INTEGRAL
Ejemplo de texto estructurado INTEGRAL
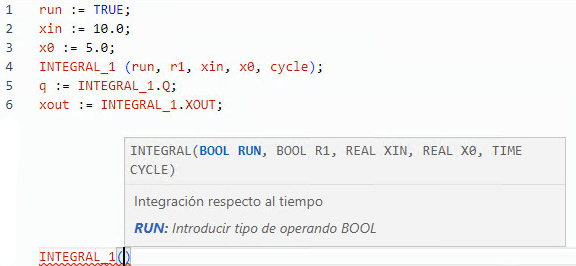
(* ST Equivalence: INTEGRAL1 is an instance of a INTEGRAL block *) INTEGRAL1(manual_mode, NOT(manual_mode), sensor_value, init_value, t#100ms); controlled_value := INTEGRAL1.XOUT;
Resultados
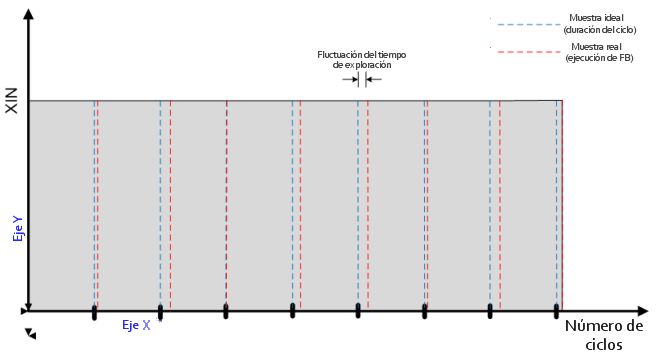
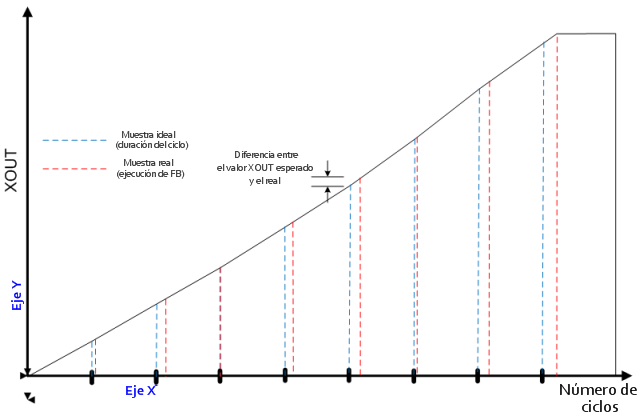
Ejemplo de XIN en sincronización con una ejecución de un bloque de funciones
Las imágenes siguientes muestran el efecto de jitter de tiempo de exploración en el valor de XOUT:
Efecto de jitter de tiempo de exploración en el valor de XOUT
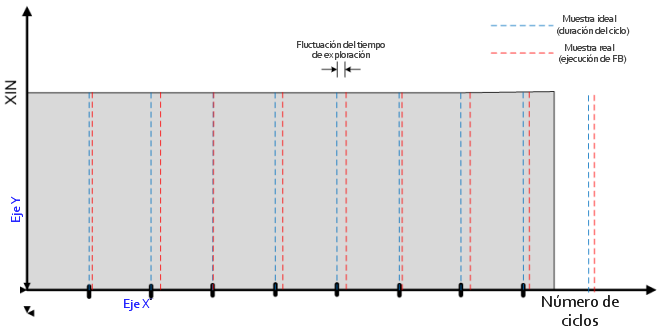
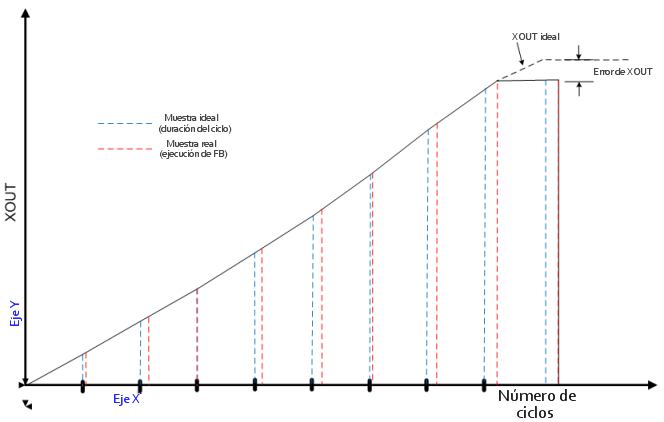
Ejemplo de XIN sin sincronización con una ejecución de un bloque de funciones
Las imágenes siguientes muestran un ejemplo en el que un error se introduce en el valor de XOUT de un bloque de funciones Integral:
Ejemplo en el que un error se introduce en el valor de XOUT de un bloque de funciones Integral
Entregue su opinión