Emulación de sistema de control PID para variables industriales
La aplicación de un sistema de control PID es una herramienta muy útil para los equipos de sistema de control y automatización, ya que permite realizar pruebas críticas de variables, sistemas y procesos clave. - [Tiempo de implementación: 60 minutos]
El propósito de esta aplicación de emulación de sistema de control PID es simular un sistema de primer orden en el dominio de Laplace junto con un controlador PID, lo que permite probar y analizar el comportamiento de una variable que se desea controlar dentro de una planta.
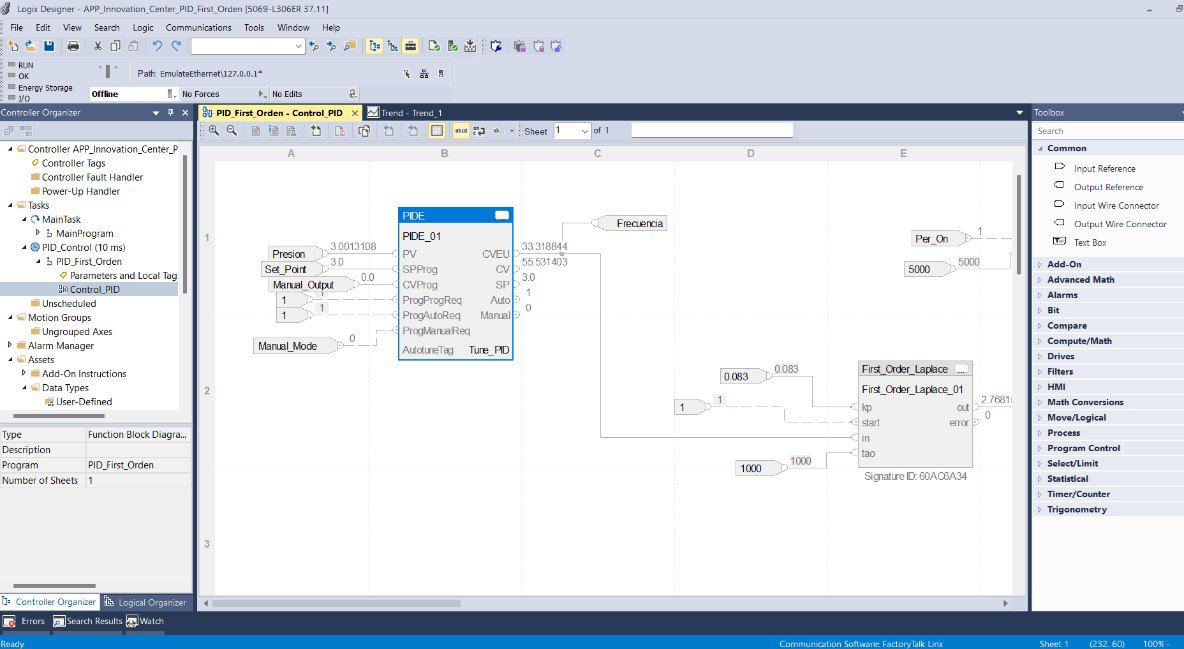
La aplicación se desarrolló en el entorno Studio 5000 Logix Designer utilizando el lenguaje de bloque de funciones. Incluye la emulación de un sistema de primer orden en el dominio de Laplace, su controlador PID y un entorno de perturbaciones. Estos componentes se consideran los criterios principales para probar el control de variables clave en entornos industriales.
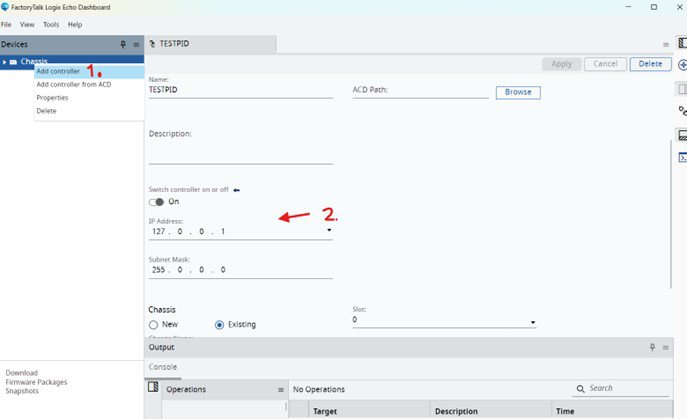
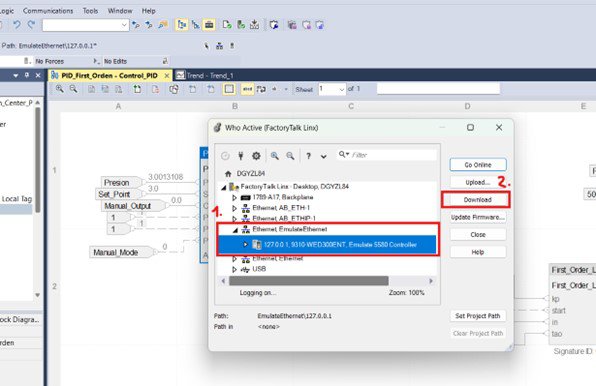
Esta aplicación ofrece la opción de operar digitalmente mediante FactoryTalk Logix Echo o, alternativamente, conectarse a una PC/portátil y descargar el programa a un controlador físico disponible para el usuario. En esta primera versión, el enfoque principal está en el monitoreo a través de los gráficos generados por la emulación, que muestran las variables de control y de proceso con las que el usuario desea trabajar.
¿Es esto útil para mí?
Muchas variables industriales se comportan de manera similar al sistema modelado en esta aplicación: temperatura, presión (utilizada en la explicación y el ejemplo), velocidad, nivel, etc. Modelar estos sistemas de primer orden es práctico debido a su simplicidad matemática (que facilita el diseño del controlador PID), la tolerancia de aproximación aceptable y la facilidad de identificar parámetros y coeficientes.
Esta aplicación se ha convertido en una herramienta muy útil para los equipos de control de la planta y automatización, integradores y otros interesados en los sistemas de control industrial. Permite realizar pruebas relevantes para determinar la mejor manera de controlar variables clave, como identificar cuánto tiempo tarda una planta en estabilizarse en función de las variables de cada proceso. Todo esto se puede hacer antes de las pruebas en planta y la puesta en marcha del sistema.
Este tipo de aplicación es importante porque los usuarios pueden construirla y ajustarla para que se convierta en una herramienta de capacitación tecnológica práctica para usar con sus propios equipos y como un entorno de prueba para validaciones de conceptos técnicos que respaldan el desarrollo de proyectos futuros.
Descargas
Tenga en cuenta: deberá aceptar los términos y condiciones para cada descarga.
El sistema se puede probar con un controlador Rockwell conectado al entorno de programación Studio 5000.
Conocimientos prácticos necesarios
Habilidades básicas de programación y configuración en Studio 5000 Logix Designer y FactoryTalk Logix Echo, y comprensión de la funcionalidad y parametrización del controlador Allen-Bradley.
Conocimientos teóricos necesarios
Sistemas de primer orden en el dominio de Laplace
Un sistema de primer orden típico tiene una función de transferencia de la forma:
Este tipo de sistema responde exponencialmente a una entrada de paso, sin oscilaciones y con una sola constante de tiempo.
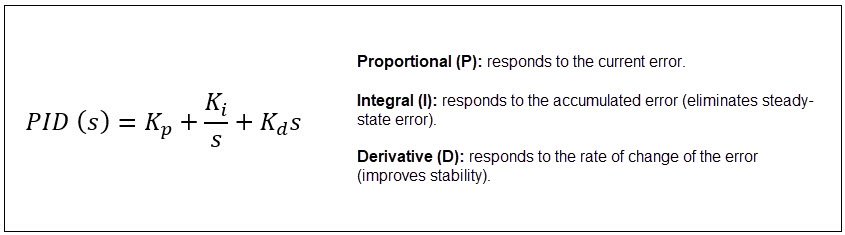
Controlador PID
El controlador PID consta de tres componentes:
Cómo interactúan el PID y el sistema de primer orden
Cuando un controlador PID se conecta a un sistema de primer orden, el objetivo es modificar la respuesta del sistema para cumplir con criterios de rendimiento específicos, tales como:
Tiempo de respuesta más rápido
Menor sobreimpulso
Eliminación del error de estado estacionario
La función de transferencia de lazo cerrado se convierte en:
Paso 3: Validar los bloques de funciones y comprender su uso
En el ejemplo actual, se emula una planta y su sistema de control. Las dos variables de proceso clave son:
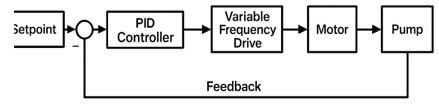
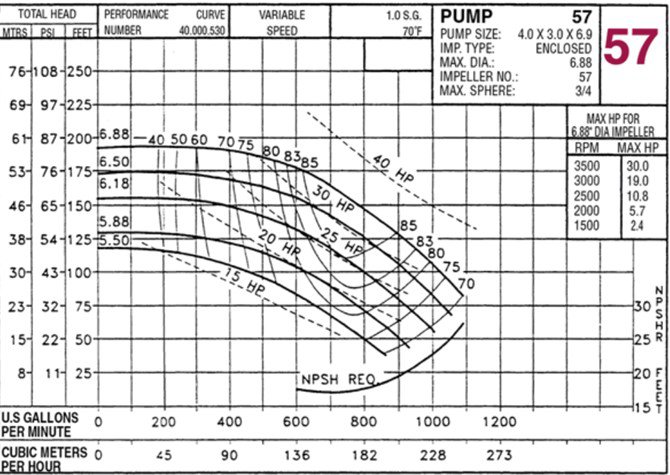
Presión – Variable de proceso (por ejemplo, gestionada mediante una bomba) junto con un sistema de control liderado por el controlador Allen-Bradley (ControlLogix) además de otro dispositivo que funciona en base a la siguiente variable.
Frecuencia – Variable de control (por ejemplo, gestionada mediante un variador de frecuencia – VFD)
En resumen, el sistema controla una bomba mediante ajustes de frecuencia del variador para estabilizar el nivel de presión.
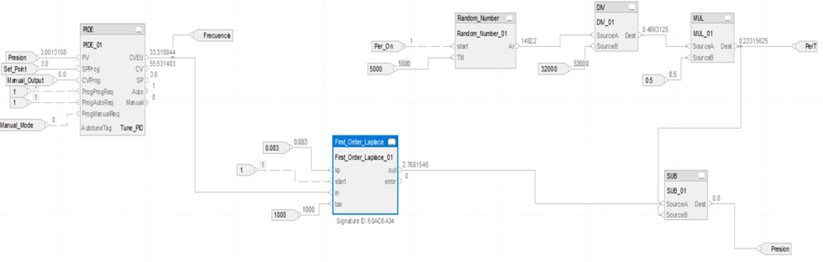
El sistema de programa consta de tres partes fundamentales:
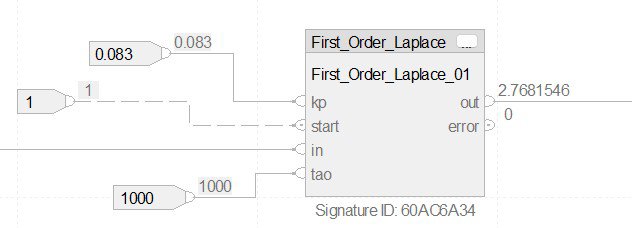
Este bloque simula el comportamiento de un sistema lineal de primer orden en el dominio de Laplace, representando la variable de presión. Sigue la ecuación descrita anteriormente en la documentación.
Las variables mostradas en el gráfico deben definirse en este bloque: la ganancia estática del sistema (Kp) y la constante de tiempo (τ) se basan en valores previamente estimados.
Por ejemplo, τ = 1000 ms corresponde al tiempo de estabilización aproximado del sistema de primer orden. Funcionalmente, podemos estimar la ganancia estática del sistema:
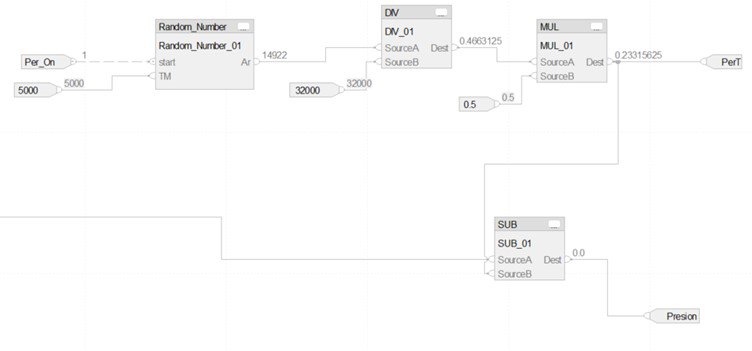
Este segmento incluye varios bloques de funciones matemáticas para simular un entorno perturbador.
En el diagrama se muestran cuatro bloques:
Random Number: Genera un valor aleatorio de 0 a 32000 cada 5 segundos, simulando perturbaciones periódicas.
DIV y MUL: Convierten el valor aleatorio en un porcentaje y lo escalan a la perturbación máxima definida (por ej., 5 bar o 0.5).
SUB (Subtract): Representa el efecto de la perturbación en la salida de presión de la bomba. La salida de este bloque se convierte en la señal de retroalimentación que cierra el lazo y entra en el controlador PID.
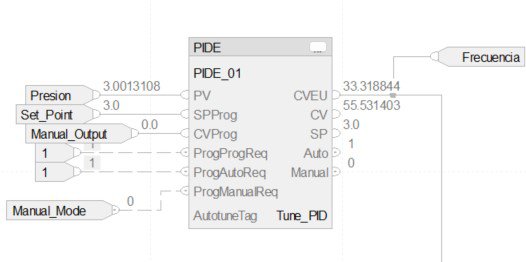
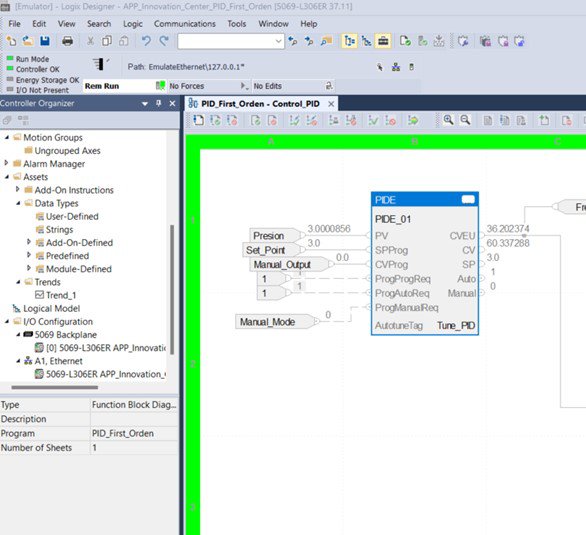
Este bloque realiza el control del sistema mediante un bloque de funciones PID. La configuración adecuada de este bloque es esencial para el éxito de la aplicación.
Variables de entrada principales
PV (valor de proceso): presión de salida final tras la interacción de la perturbación.
SPProg (punto de ajuste): nivel de presión deseado.
CVProg (variable de control): se usa en modo manual para definir la frecuencia para observar el comportamiento del sistema.
ProgProgReq: habilita el modo automático (se establece en el bit “1”).
ProgManualReq: habilita el modo manual (se establece en el bit “1”); los otros modos deben establecerse en “0”.
Variables de salida principales
CV: salida porcentual usada en modo manual.
CVEU: valor final de la variable de control (frecuencia), que se introduce en el bloque Laplace.
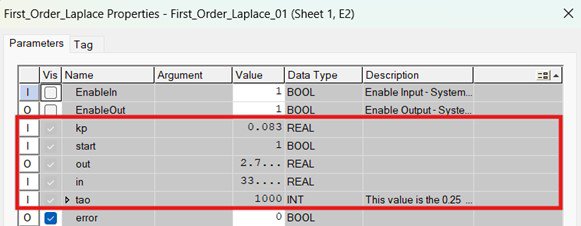
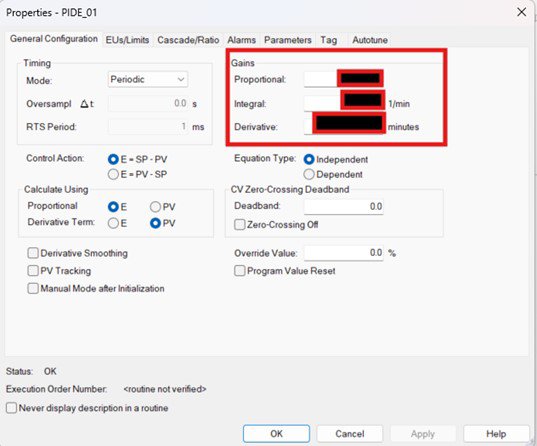
Una vez dentro de las propiedades del bloque PID, configuramos el bloque de control para asegurar una respuesta adecuada del sistema.
La primera vez que se usa el bloque de control PID, es necesario realizar el proceso de Autotune (este procedimiento debe ejecutarse en modo de ejecución – controlador), ya que es esencial para calcular las ganancias del sistema (que no se han configurado previamente – en la imagen se inhabilitaron para fines de explicación) y otros parámetros del bloque de control que posteriormente operarán en modo automático (ProgProgReq=1).
Para iniciar esto, acceda a las propiedades del bloque (Properties – imagen anterior) y comience a seleccionar los ajustes apropiados según las condiciones específicas de la aplicación
La primera configuración relevante es el modo de temporización (1), que debe establecerse en periódico, como se recomienda, debido a la naturaleza de la ejecución de la tarea. A continuación, está la acción de control (2); en este caso, dado que el comportamiento de control corresponde a una acción directa, se debe seleccionar la primera de las dos opciones disponibles. Por último, la última opción se refiere a cómo se calcula la variable de proceso (3); la opción seleccionada corresponde a la configuración típica para este tipo de sistemas integrales.
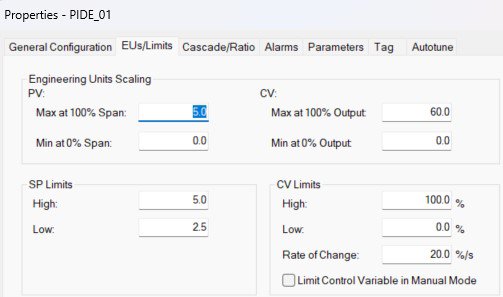
La siguiente ficha dentro de la ventana de propiedades es EUs Limits, donde se deben definir los rangos de funcionamiento de las variables clave del sistema: PV (variable de proceso), en nuestro caso, presión, y CV (variable de control), en nuestro caso, frecuencia. Según los parámetros mencionados anteriormente en la documentación, el valor máximo de presión se define como 5 bar y el valor máximo de frecuencia es 60 Hz. Posteriormente, se configuran los límites para la variable de control (CV) y la tasa de cambio se refiere al porcentaje de salida del controlador segmentado según los intervalos de pasos definidos
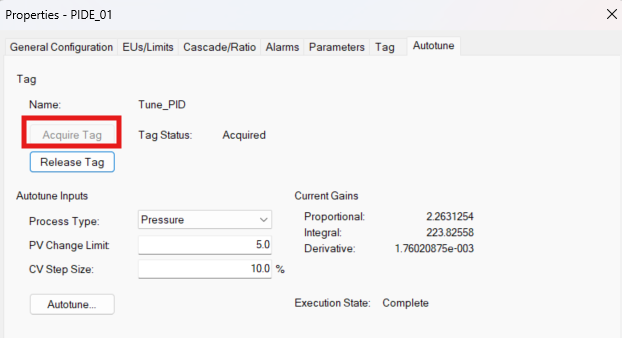
Por último, para el proceso de Autotune, navegamos a la ficha con el mismo nombre, donde se debe adquirir un Tag (esto se requiere cuando se realiza el proceso por primera vez). Una vez adquirido el Tag, procedemos a definir las entradas de Autotune, comenzando con el tipo de variable (presión), el límite máximo para el cambio de variable de proceso y, por último, el tamaño de los incrementos de pasos unitarios que utilizará el proceso de control.
Para completar el cálculo de ganancia, hacemos clic en el botón Autotune. Es importante señalar que el módulo PID debe estar en modo manual para que el proceso de Autotune se ejecute correctamente. Al finalizar, el módulo debe cambiarse al modo automático para comenzar a funcionar, lo que se controla mediante el Tag Manual_Mode.
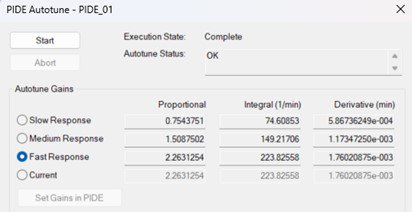
Para calcular las ganancias, simplemente presione el botón “Start”. El programa calculará las ganancias en función de tres tipos de respuesta (lenta, media, rápida), de los cuales se debe seleccionar uno según los requisitos del sistema de control. Estas ganancias se aplican al sistema de control mediante el botón “Set Gains in PIDE”. La idea es que, al observar la representación gráfica mostrada en Studio 5000, el usuario pueda identificar cuál de los tipos de respuesta de ganancia calculados es el más adecuado para el sistema emulado.
Si se requiere información adicional o explicaciones funcionales para los bloques de programación usados en el programa de aplicación, se pueden consultar las respectivas secciones de “Help” para cada bloque, como la que se comparte en la sección “Links of Interest” de esta documentación.
Como se mencionó anteriormente, para realizar los cambios y ajustes finales (Autotune), el sistema debe estar operando en modo “Remote Run” dentro de Studio 5000. Una vez establecido esto, el sistema general estará completamente operativo, lo que permite verificar la respuesta del sistema de control a toda la estructura que lo comprende, incluidas las perturbaciones.
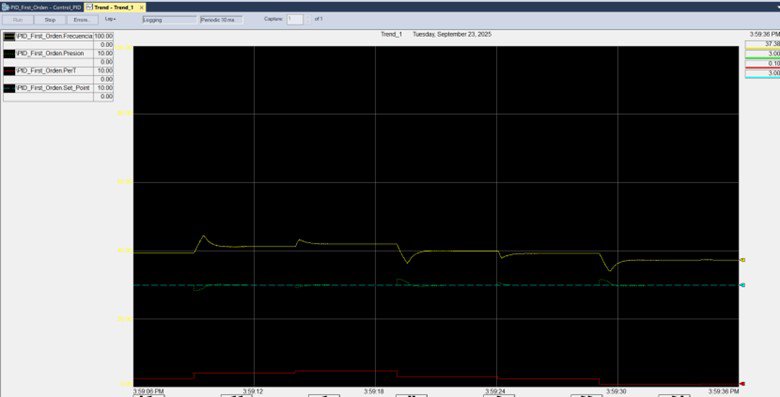
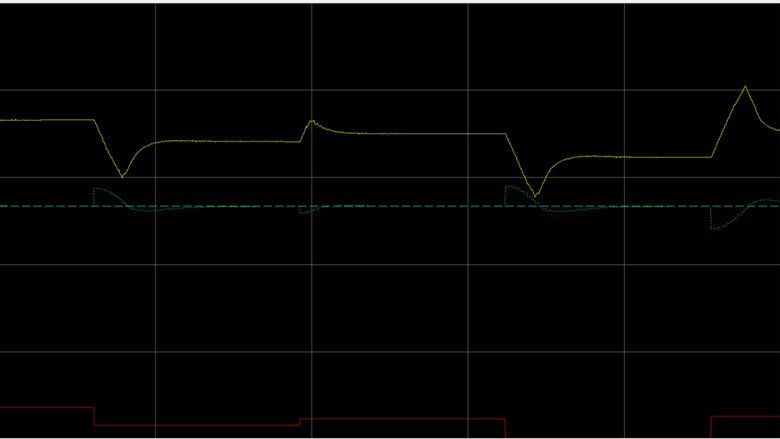
Al ejecutar el comando “Run”, la respuesta del sistema puede visualizarse mediante un gráfico que muestra las cuatro curvas más importantes: Amarilla (Frecuencia), Verde (presión), Roja (perturbaciones) y Azul (punto de ajuste definido por el controlador)
Esta representación gráfica nos permite identificar comportamientos clave del sistema, lo que permite la emulación y el análisis del proceso de control y su respuesta a diversos escenarios que pueden surgir. Esto es ideal para el propósito previsto: crear escenarios de prueba antes de la implementación en la planta real, lo que permite ajustes y mejoras potencialmente significativas. En el área resaltada dentro del cuadro naranja, el gráfico se centra en un período de tiempo durante el cual el sistema experimenta perturbaciones. Muestra cómo el “drive” ajusta la frecuencia para estabilizar el sistema y cómo la variable de proceso, “presión”, se alinea gradualmente con el objetivo de control (punto de ajuste – curva azul). A lo largo del marco de tiempo graficado, observamos variaciones en las perturbaciones y cambios correspondientes en cada curva de respuesta, incluidos ajustes, sobreimpulsos y otros comportamientos típicos de los sistemas industriales con este tipo de variable, comúnmente modelados como sistemas lineales de primer orden en el dominio de Laplace.
Es importante señalar que el ejemplo implementado en la aplicación fue diseñado para emular un proceso de control que involucra una bomba, que funciona junto con un drive y un motor como elementos de control. Sin embargo, la aplicación está estructurada de tal manera que, como se explicó anteriormente, puede emular escenarios que involucran otras variables industriales que se comportan de manera similar en sistemas de primer orden, como nivel, temperatura, velocidad, etc. Todos los ajustes necesarios según la situación pueden aplicarse dentro del bloque de funciones de control PID, como se detalla en toda la documentación.
Emulación de sistema de control PID para variables industriales
Versión 1.2 - Mayo de 2026
¡Suscríbase!
Reciba nuevas versiones de apps y otras actualizaciones del Innovation Center directamente en su bandeja de entrada.
El contenido de este sitio ha sido traducido mediante inteligencia artificial (IA) sin revisión humana o ediciones. El contenido podría contener errores o inexactitudes, y se proporciona “tal cual” sin ninguna garantía. El texto oficial es la versión en inglés del contenido.
Actualice sus preferencias de cookies para continuar.
Esta función requiere cookies para mejorar su experiencia. Actualice sus preferencias para permitir estas cookies.:
Cookies de Redes Sociales
Cookies Funcionales
Cookies de Performance
Cookies de Marketing
Todas las cookies
Puede actualizar sus preferencias en cualquier momento. Para más información, vea nuestro {0}
Política de Privacidad