Descargas

En esta página:
¿Para qué es esto?
Esta aplicación le servirá de ejemplo de cómo utilizar la librería raM_Tec_RotaryKnife.
Este AOI calcula cuatro perfiles de leva para el cuchillo rotativo:
- Leva de conexión para aceleración desde la posición estática. Normalmente desde la posición inicial del eje después de la puesta a cero o cuando no hay producto / no hay bolsa en ejecución.
- Leva cíclica para movimiento continuo: un corte por longitud de producto.
- Leva de desconexión para desaceleración al detener el cuchillo sin detener el maestro.
- Leva de espera para que el eje esclavo permanezca inmóvil durante una longitud de producto
Usar cuando: Se requiere leva de cuchillo rotativo para un eje.
No usar cuando: No aplicable (N/A).
Descripción funcional
La instrucción de cálculo de leva para el cuchillo rotativo generará perfiles de leva para sincronizar la velocidad del cuchillo con la velocidad de la banda mientras el cuchillo está en contacto con la banda.
Durante la operación cíclica de un cuchillo rotativo, habrá una porción sincronizada y una porción de compensación (ver imagen a continuación). La porción sincronizada garantiza la coincidencia de la velocidad del cuchillo y la banda, mientras que el movimiento de compensación permite longitudes de corte que son más cortas o largas que la circunferencia del rodillo del cuchillo al acelerar o desacelerar.
Movimiento de Compensación o Movimiento de Ajuste:
Movimiento del cuchillo donde no hay contacto entre el cuchillo y la banda (velocidades no sincronizadas).
Existen dos posibles perfiles de interpolación para el Movimiento de Compensación:
- La prioridad de interpolación es la energía mínima utilizada y la velocidad máxima; esto puede provocar un perfil de aceleración no continuo a pesar de que el perfil de velocidad y el perfil de posición son continuos.
- La prioridad de interpolación es la suavidad del movimiento (perfil de posición, velocidad y aceleración continuos), esto puede causar una velocidad máxima más alta y hacer que el cuchillo se invierta para parámetros que no se invertirán cuando se seleccione el modo de velocidad máxima mínima.
Movimiento Sincronizado:
Movimiento del cuchillo donde el cuchillo y la banda están en contacto (velocidades sincronizadas).
Existen dos perfiles posibles para el Movimiento Sincronizado:
- Perfil Lineal o Calcula la velocidad angular del cuchillo para que coincida con la velocidad lineal de la banda.
- Compensación de Arcoseno o Calcula el componente lineal de la velocidad angular en cada punto de sincronización para mantener exactamente la velocidad lineal del cuchillo con la banda.
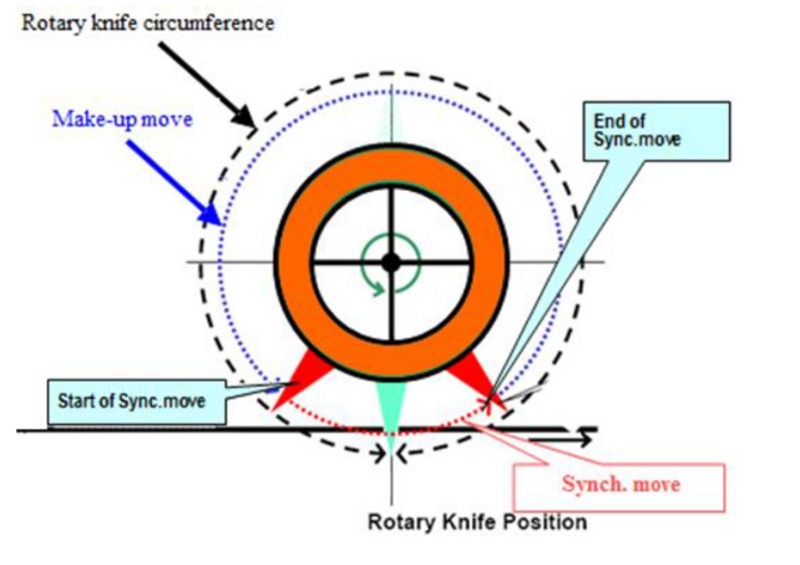
Figura 1. Rotary Knife Position
La instrucción del Cuchillo Rotativo generará cuatro Perfiles de Leva (CAM) basados en entradas configurables por el usuario.
- Leva de Conexión:
Utiliza este Perfil de Leva cuando el maestro está en movimiento y el cuchillo está detenido. El Perfil de Conexión acelerará el cuchillo desde una velocidad de cero hasta la velocidad de sincronización con la distancia definida entre el maestro y el esclavo, minimizando el estrés mecánico. La Leva de Conexión comenzará en la posición inicial del cuchillo y terminará en el inicio de la distancia de sincronización. La distancia de la Leva de Conexión sumada a la distancia de la Leva de Desconexión dará como resultado un ciclo completo (distancia de la Leva Cíclica). Esto es válido tanto para las distancias del maestro como para las del esclavo.
- Leva Cíclica:
Utiliza este Perfil de Leva como el ciclo continuo para el cuchillo (un producto). Contiene un movimiento de sincronización (definido con Set_CutAngle en grados) y un movimiento de compensación (definido con Set_ProductLength y Set_KnivesNumb).
- Leva de Desconexión:
Utiliza este Perfil de Leva cuando sea necesario ordenar que el cuchillo se detenga mientras el maestro sigue en movimiento. El Perfil de Desconexión desacelerará el cuchillo hasta una velocidad de cero con la distancia definida entre el maestro y el esclavo, minimizando el estrés mecánico. La Leva de Desconexión contiene el perfil de sincronización y el perfil de movimiento desde la velocidad de sincronización hasta la velocidad cero con la distancia definida entre el maestro y el esclavo. La distancia de la Leva de Conexión sumada a la distancia de la Leva de Desconexión dará como resultado un ciclo completo (distancia de la Leva Cíclica). Esto es válido tanto para las distancias del maestro como para las del esclavo.
- Leva de Espera:
Utiliza este perfil de Leva para hacer que el esclavo permanezca inmóvil durante una distancia del maestro (Set_ProductLength).
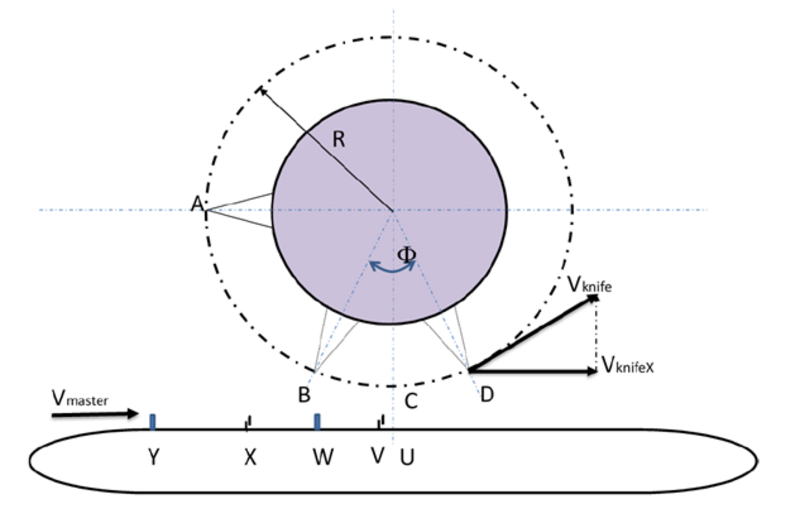
Figura 2. Rotary Knife
- Set_CutAngle
- Ángulo de corte donde el maestro y el esclavo se mueven sincrónicamente, el valor está en grados (como todo el esclavo debe escalarse en grados). Este valor define la distancia que debe recorrer el maestro (X a V).
- Set_KnivesNumb
- Número de cuchillas. El número de cuchillas define la distancia completa de un ciclo (por ejemplo, 1 cuchilla = 360 grados, 2 cuchillas = 180 grados, 3 cuchillas = 120 grados, etc.).
- Set_KnifeRadius
- Radio del cuchillo. Las unidades de radio deben coincidir con las unidades del maestro (por lo tanto, si las distancias del maestro están en mm, debe definirse en mm; si está en pulgadas, el diámetro debe estar en pulgadas).
- Set_ProductLength
- Distancia del maestro entre dos cortes (Y a W), definida en unidades del maestro.
- Set_KnifeStartDist
- La distancia (A a C, en grados) desde la posición inicial del esclavo hasta el primer corte (es decir, después de la puesta a cero o espera). La distancia está definida hasta la posición de corte, que siempre permanece igual e independiente de los cambios en el ángulo de corte (la mitad de la distancia de corte se resta automáticamente dentro de AOI para el cálculo de la leva de conexión, ya que esta leva no contiene el movimiento de sincronización, distancia de A a B).
- Set_FilmStartDist
- Distancia del maestro (U a W en unidades del maestro) para la leva de conexión. Es la distancia de la película hasta la próxima posición de corte al comenzar después de la puesta a cero o al pasar de la espera (típicamente la mitad de la longitud del producto).
- Set_KnifeStopDist
- Distancia del esclavo desde la posición de corte hasta la posición inicial (C a A, la leva misma es una mitad de sincronización más larga para llegar a la posición inicial, porque contiene todo el perfil de sincronización).
- Set_FilmStopDist
- Distancia del maestro para la leva de desconexión desde la posición de corte hasta la posición inicial (es decir, la mitad de la longitud del producto).
- Cfg_ArcSinComp
- Define el perfil de velocidad del movimiento sincronizado. Si se establece en 0, el perfil de velocidad es lineal y la velocidad Vmaster coincide con la velocidad Vknife. Si se establece en 1, la velocidad Vmaster coincide con la proyección de Vknife en la dirección de Vmaster (VknifeX) para una sincronización más precisa.
- Cfg_CompMode
- Define la interpolación del movimiento de compensación. ▪ Si se establece en 0 (valor predeterminado), entonces la prioridad de interpolación es la energía mínima utilizada y la velocidad máxima; esto puede causar un perfil de aceleración no continuo (perfil de velocidad y perfil de posición son continuos). ▪ Si se establece en 1, entonces la prioridad de interpolación es la suavidad del movimiento (perfil de posición, velocidad y aceleración son continuos); esto puede causar una velocidad máxima más alta y revertir el cuchillo para parámetros que no se revierten con el modo establecido en 0.
- Cfg_KnifeReversal
- Habilita la verificación de errores para una leva para detectar si el perfil de leva calculado incluye un segmento donde el cuchillo se invierte (esto puede ocurrir en una mala combinación de parámetros de entrada, como alta velocidad de corte con una longitud de producto larga). Cuando esta verificación de errores está habilitada y el bit de error está configurado, no se calcularán las levas.
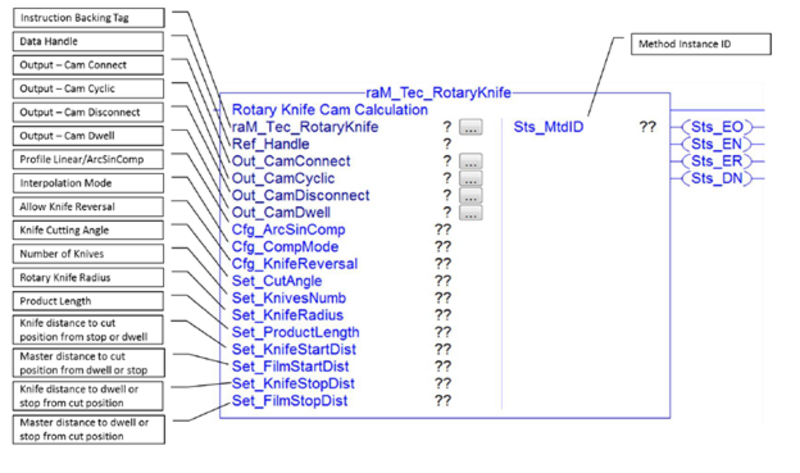
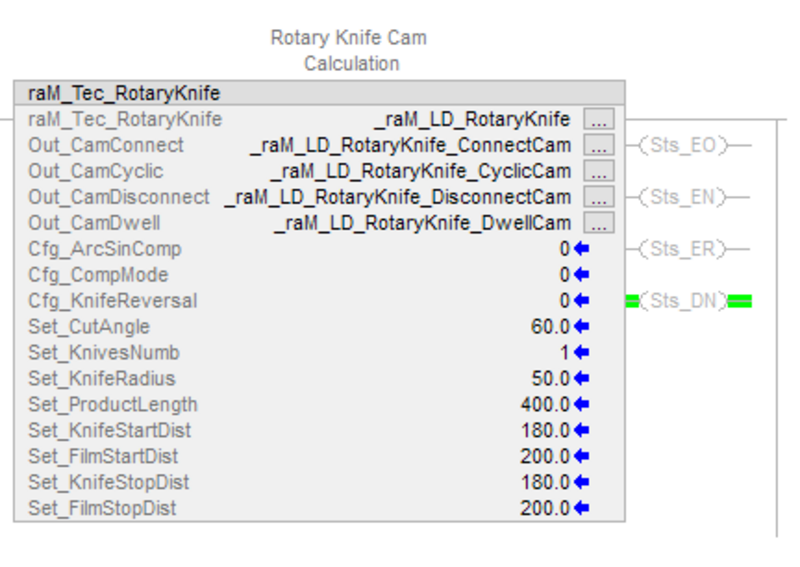
Figura 3. AOI Rotary Knife
¿Cómo puedo hacer que funcione?
Descargue el archivo .ACD Rotary Knife y siga la guía de instalación.
Prerrequisitos:
Software:
- Studio 5000 V35
- CompactLogix 5380
- Kit Kinetix 5500
Links de interés
Descargue las librerías acá.
Tenga en cuenta: deberá aceptar los Términos y Condiciones para cada descarga.
¿Necesita ayuda?
Si necesita ayuda con alguna aplicación o tiene comentarios acerca del Innovation Center, por favor contáctenos.
Guía de instalación
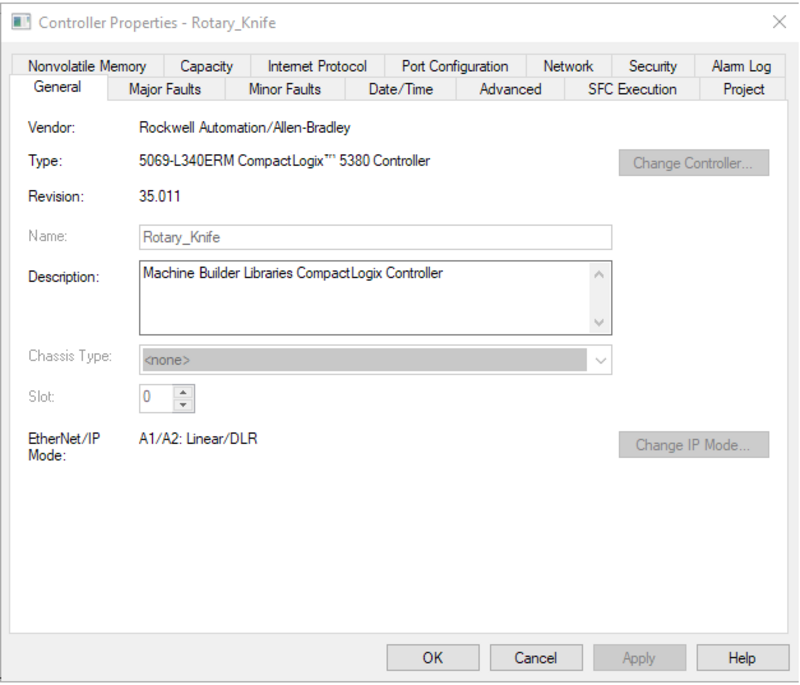
Paso 1:
Abra el archivo .ACD Rotary Knife y en las propiedades del controlador cambie el controlador al HW con el que cuenta.
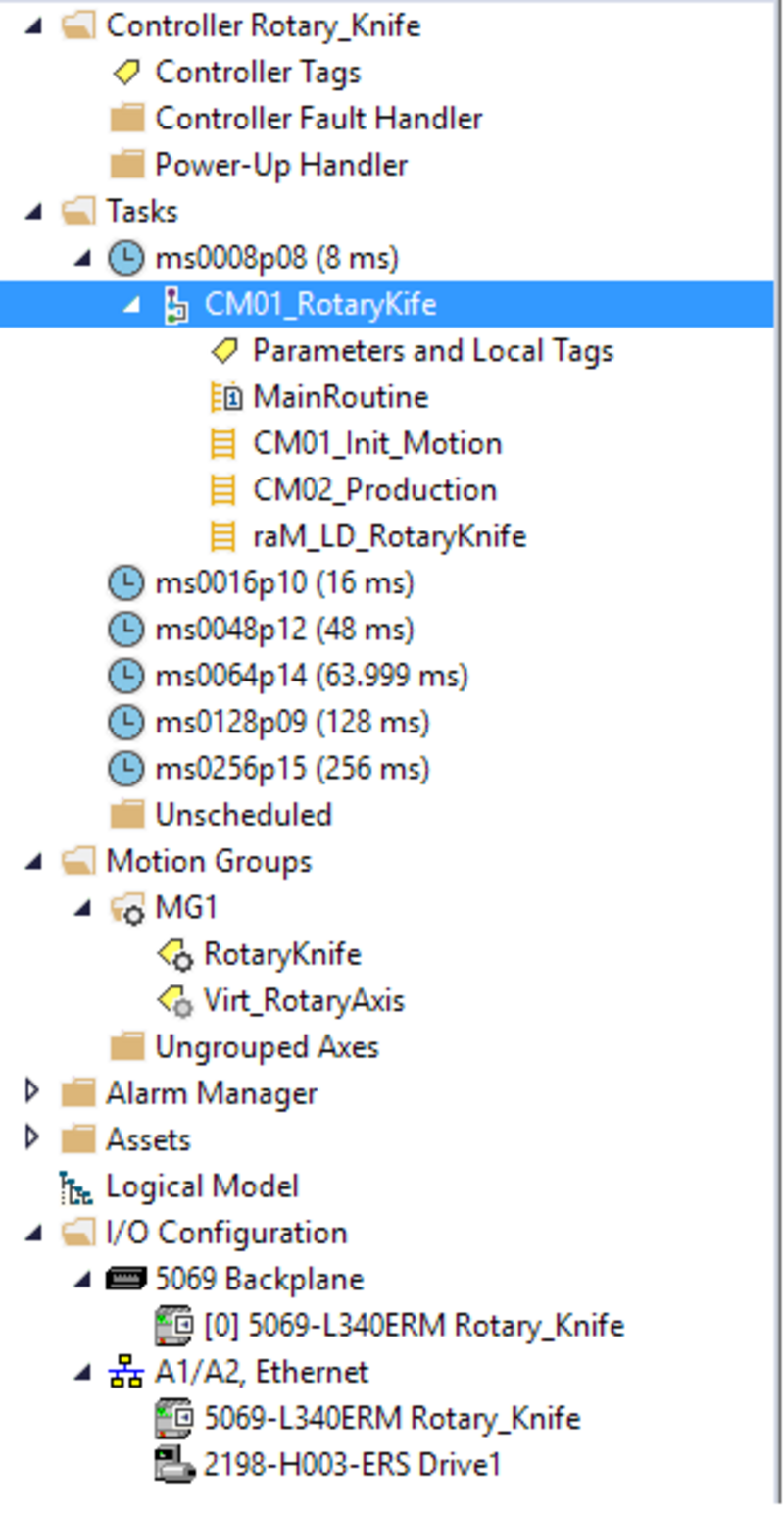
Paso 2
Modifique el Drive y Servomotor de acuerdo con lo que tenga conectado.
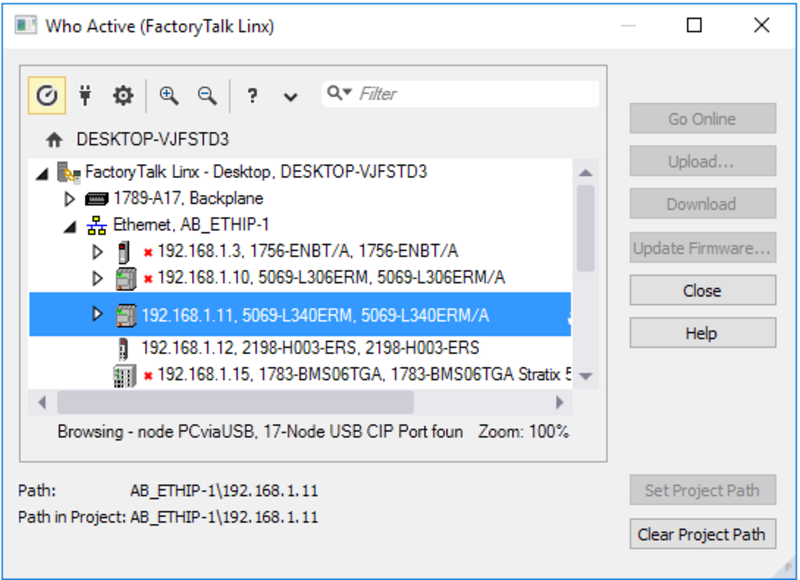
Paso 3:
Descargue el programa al Controlador y póngase en línea con el mismo.
Paso 4
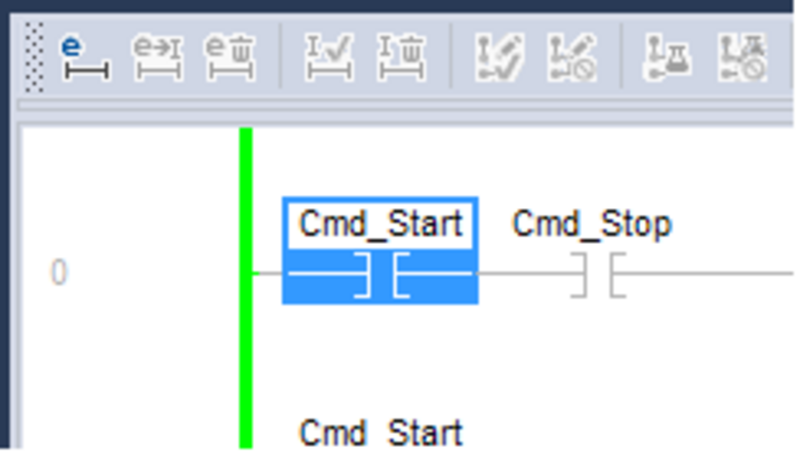
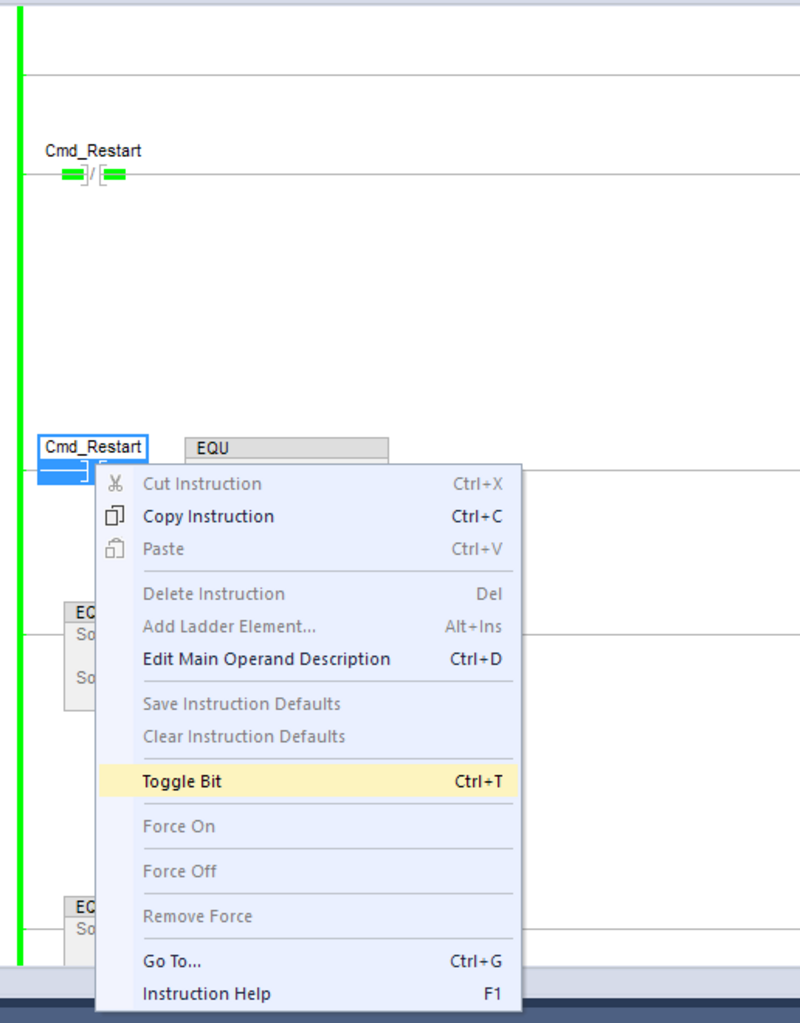
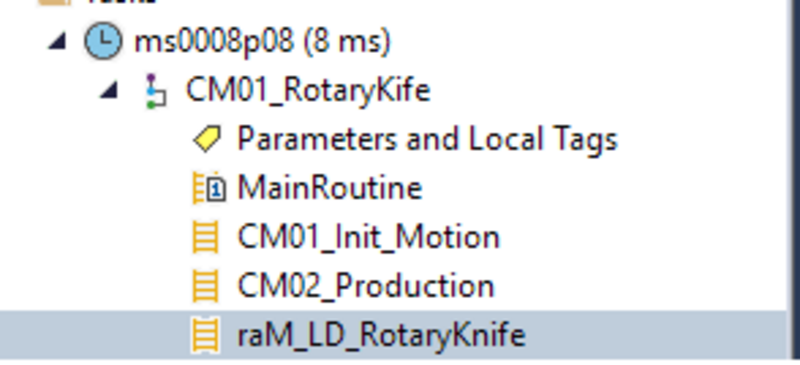
Ingrese a la Rutina señalada en la imagen:
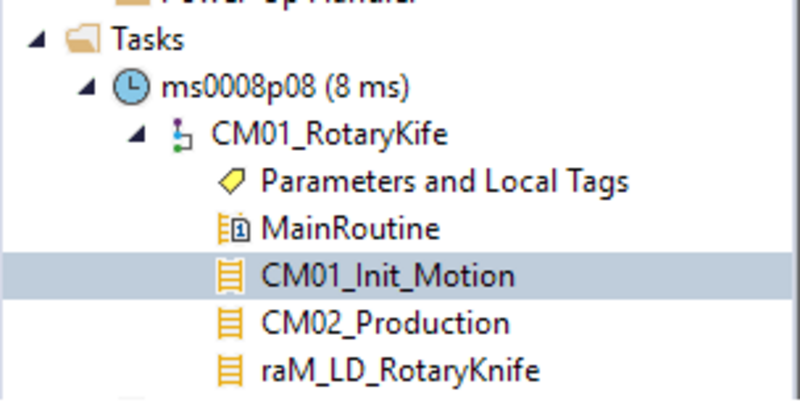
En el contacto Cmd_Reset, presione Clic derecho y seleccione Toogle Bit, con esta instrucción inicializará el servomotor, reseteará las fallas y en hará la rutina de Home:
Paso 5
Ahora vaya a la rutina Ram_LD_RotaryKnife y configure el AOI a su conveniencia.
Este es un ejemplo de cómo configurar una leva para cuchillo rotativo en el Área de Interés Operativo (AOI). Después de la puesta a cero, el cuchillo está a 180 grados de la posición de corte, y la posición de la película es de 200 unidades hasta el primer corte.
- Hay solo un cuchillo en las mordazas.
- El radio del cuchillo en las mordazas es de 50 mm.
- La posición del cuchillo después de la puesta a cero está a 180 grados de la posición de corte.
- La posición de la película después de la puesta a cero está en el centro del producto.
- El ángulo de corte es de 60 grados.
- La longitud del producto es de 400 mm.
- Cuando el cuchillo se va a detener, queremos que se detenga exactamente en la misma posición en la que se detiene después de la puesta a cero (para poder comenzar con la leva de conexión cuando no hay producto / sin bolsa en ejecución).
Paso 6
Ahora vaya a la rutina CM02_Production.
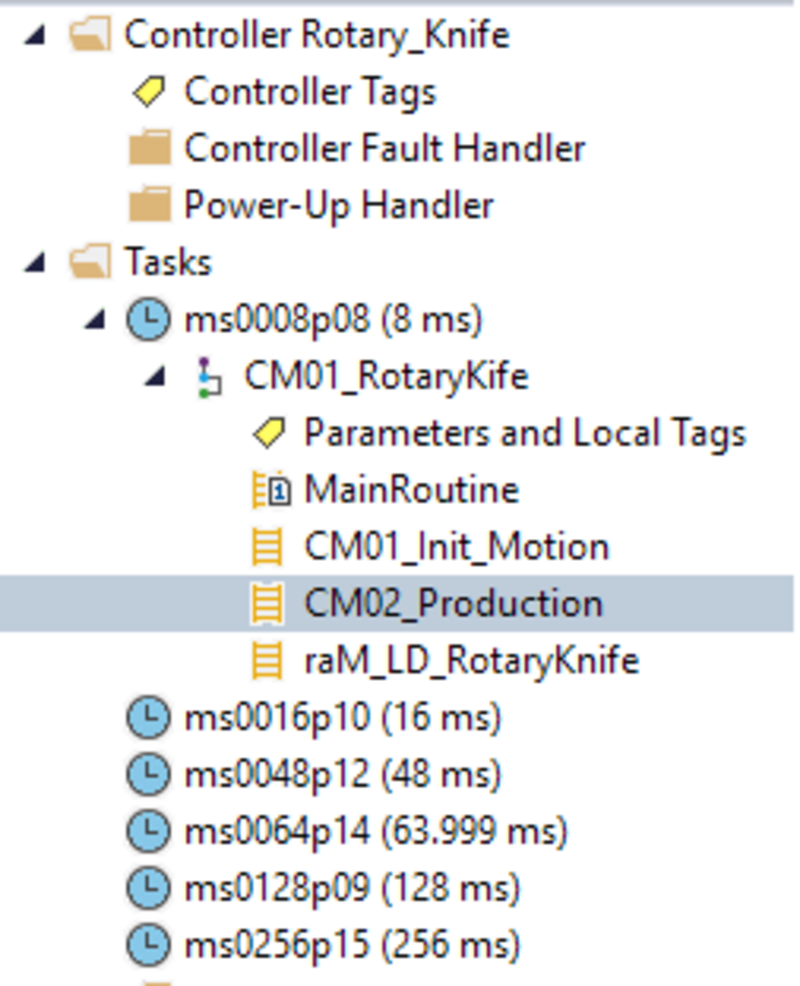
En esta rutina podrá arrancar y detener el servomoto usando la función Toogle Bit explicada en el paso 4.
El servomotor arrancara con el perfil que definió en el paso anterior.