| Ítem | Requerimiento | Versión |
|---|---|---|
| 1 | Connected Components Workbench™ | 21.00 o superior |
| 2 | PowerFlex 755T | N/A |

¿Para qué es esto?
La aplicación para control de bombeo en soluciones de presión constante permite configurar cualquier variador de la familia PoweFlex 755T para proporcionar un control de la bomba sin necesidad de un controlador externo, permitiendo al usuario configurar las funciones de dormir y despertar e ingresar los set point de proceso.
¿Esto me resulta útil?
Una configuración en Connected Components Workbench™ que incluye la configuración de un PowerFlex 755T para implementar el control de una bomba sin necesidad de utilizar un controlador externo, utilizando las funciones de dormir y despertar.
La funcionalidad incluye:
- Control de 1 bomba.
- Uso de sensores de presión analógicos con salida de 4-20mA / 0-10V para controlar la presión a la descarga de la bomba.
- Configuración del controlador PID para mantener constante la presión de la red.
- Configuración de las funciones dormir y despertar en operación de baja demanda del sistema.
- Acceso a Información de mantenimiento preventivo del variador de velocidad.
¿Cómo puedo hacer que funcione?
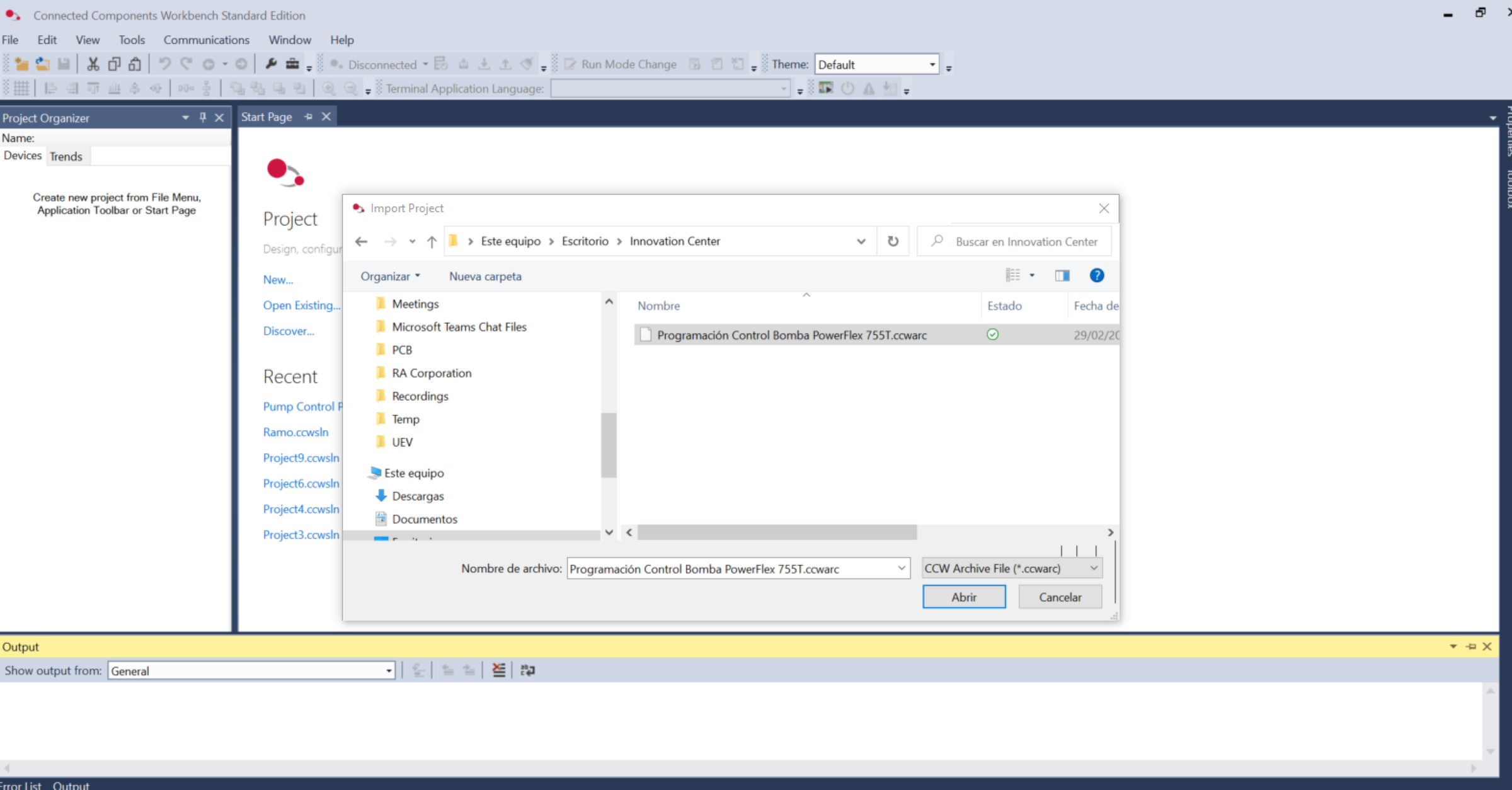
Descargue el archivo “Programación Control Bomba PowerFlex 755T.ccwarc” e importe el proyecto en el Connected Components Workbench™ y ajuste la lógica de acuerdo con la funcionalidad necesaria.
Requerimientos de sistema para la aplicación:
Conocimientos requeridos
Conocimientos básicos de programación y configuración en el software Connected Components Workbench™ y conocimiento en funcionalidad y parametrización de variadores PowerFlex 755T.
Descargas
Tenga en cuenta: deberá aceptar los Términos y Condiciones para cada descarga.
¿Necesita ayuda?
Si necesita ayuda con alguna aplicación o tiene comentarios acerca del Innovation Center, por favor contáctenos.
Guía de implementación
Paso 1
Descargue el archivo: Pump Control with PowerFlex 755T.ccwarc e importe el proyecto en el CCW:
Paso 2:
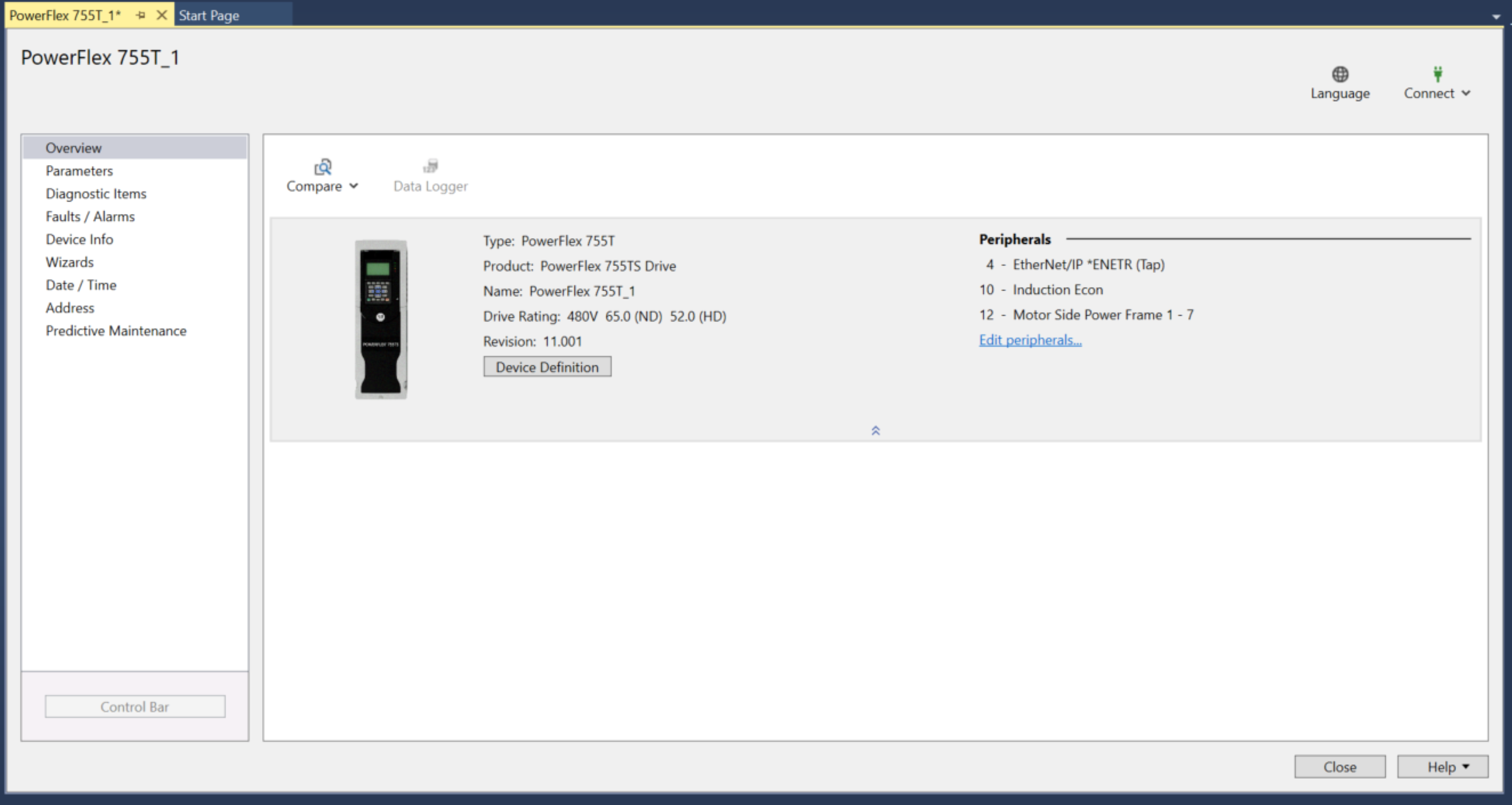
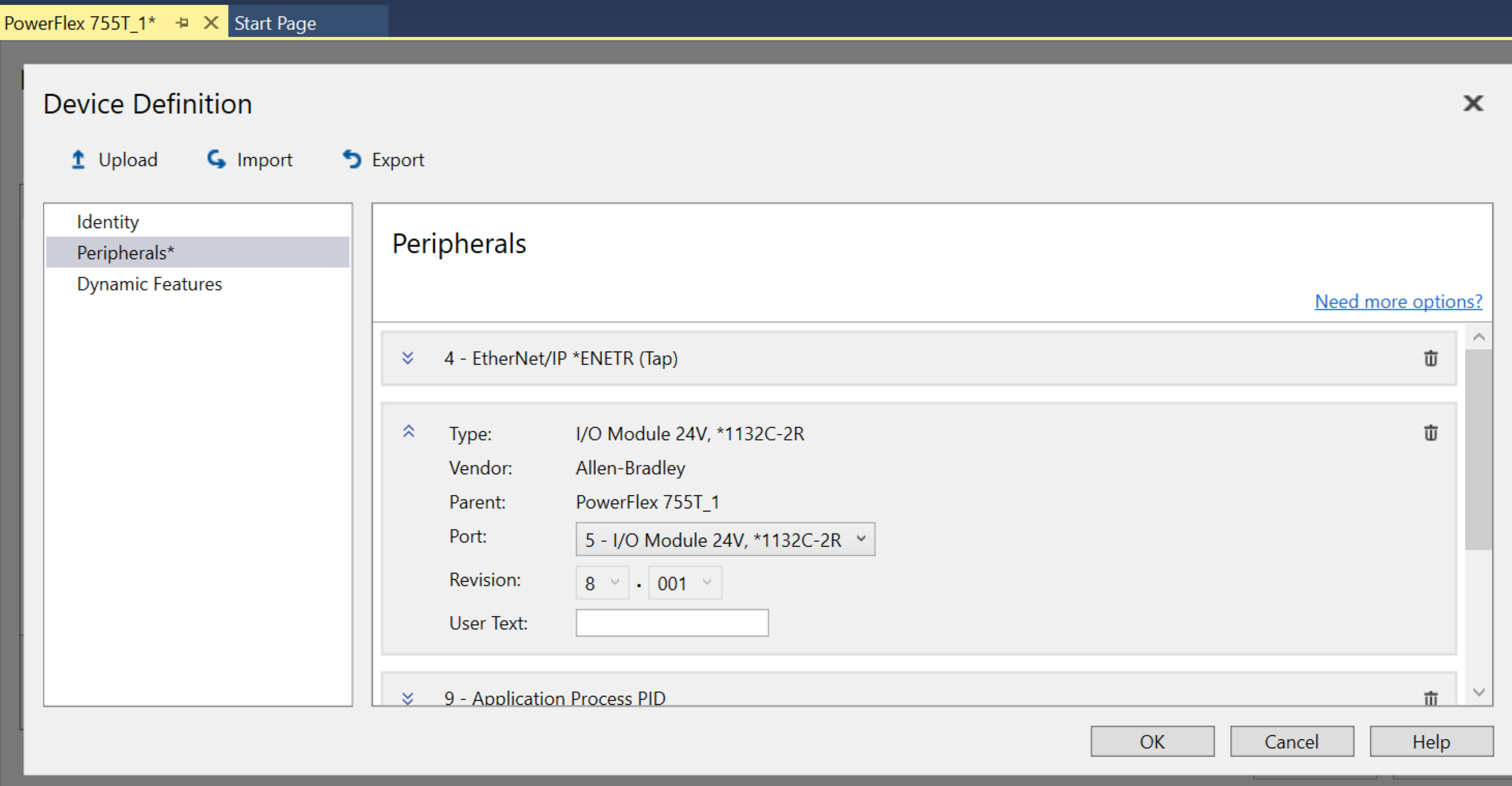
- Explore el programa, ingrese por el menú de la Izquierda a Overview y seleccione Device Definition.
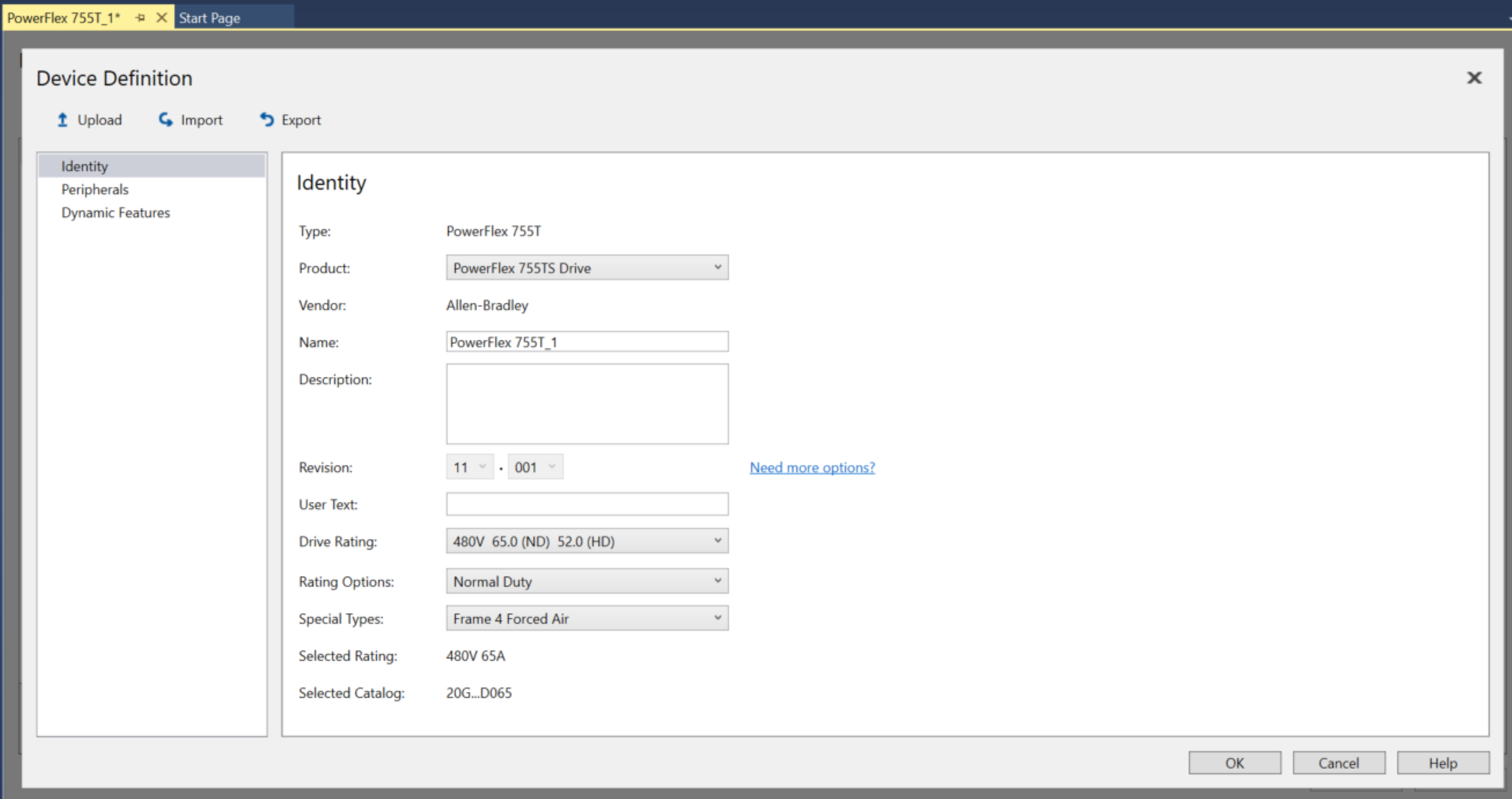
- En Identity seleccione el drive con el cual va a trabajar.
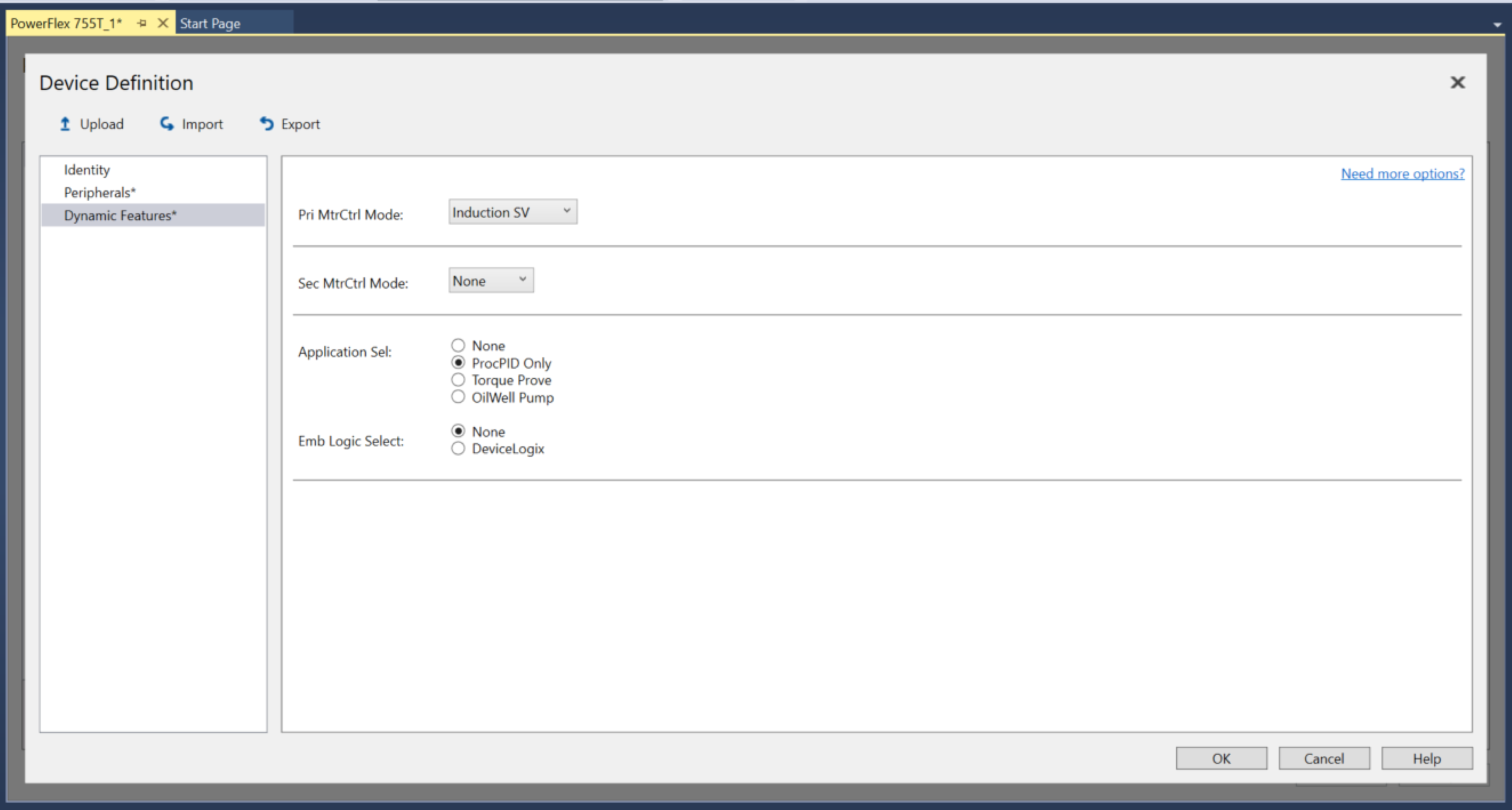
- Posteriormente en Dynamic Features seleccionaremos en Pri MtrCtrl Mode = Induction SV (Sensorless Vector Control) y en Application Set = ProcPID Only para habilitar el grupo de parámetros asociados al control PID.
- Posteriormente adicionaremos los grupos de parámetros 5 asociados al módulo de I/O.
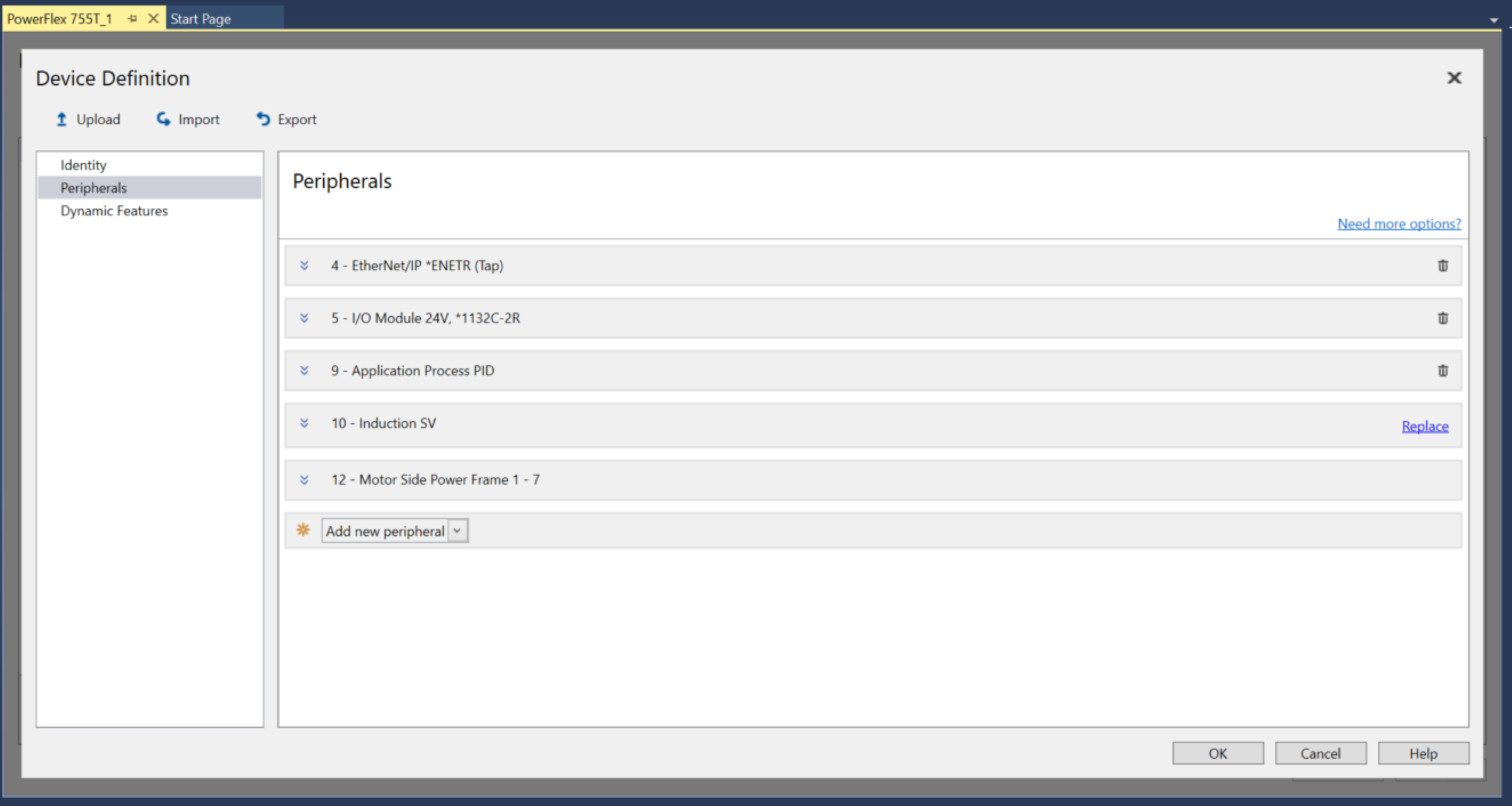
- En Peripherals se habilitaran los grupos de parámetros:
- 5- I/O Module 24V, *1132C-2R.
- 9 – Application Process PID.
- 10 – Induction SV.
Presionar OK.
Paso 3:
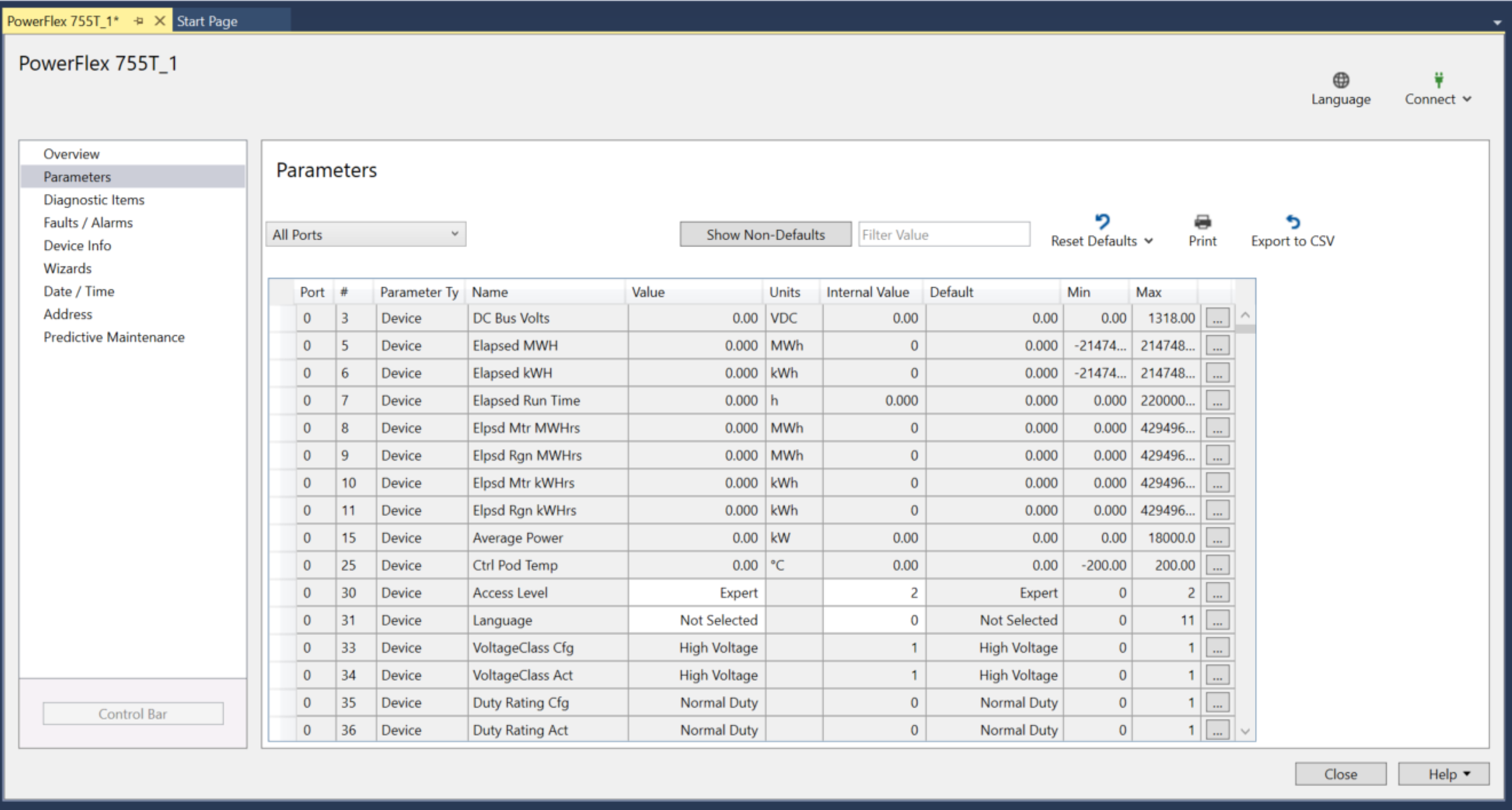
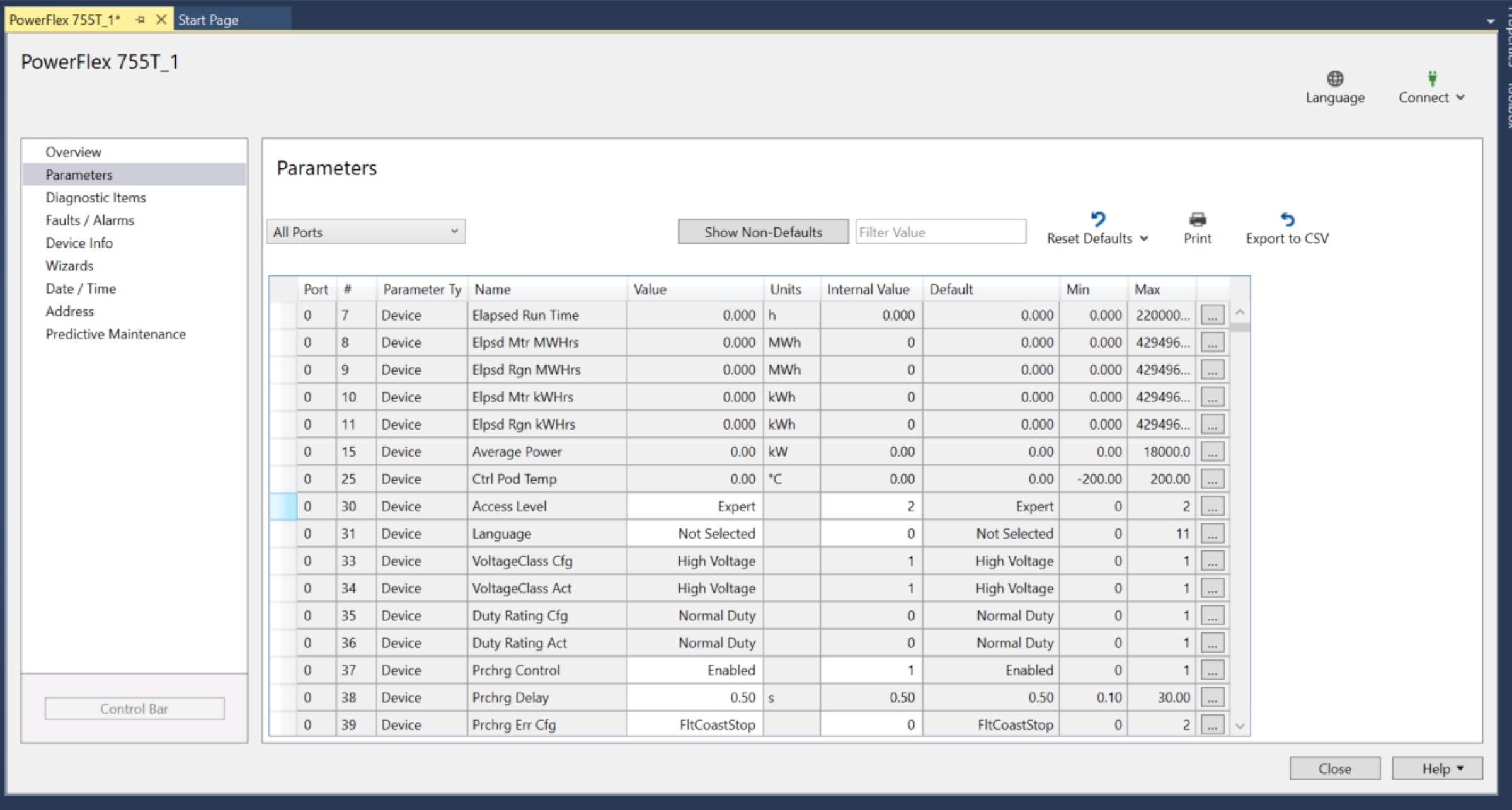
- El siguiente paso es parametrizar el equipo de acuerdo a las características del motor y la aplicación. Para ello ingresaremos a Parámetros y realizaremos los ajustes relacionados con los datos del motor, fuente de comandos y limites operacionales.
- A continuación ingresaremos a Parámetros y realizaremos los ajustes relacionados con los datos del motor, fuente de comandos y limites operacionales.
- En seguida se definirá la entrada digital que habilitará el variador así como las rampas de aceleración y desaceleración que también utilizará el control PID y los límites de velocidad.
Parametrización Paso 3:
| Puerto | Parámetro | Valor | Desripción | Comentarios |
|---|---|---|---|---|
| 10 | 30 | Expert | Nivel de Acceso | |
| 0 | 65 | Induction SV | Pri MtrCtrol | Este modo es el modo de control más básico. Regula el voltaje de salida RMS como una relación fija de la frecuencia de salida. Es adecuado para aplicaciones simples de torque variable como bombas centrífugas y ventiladores. |
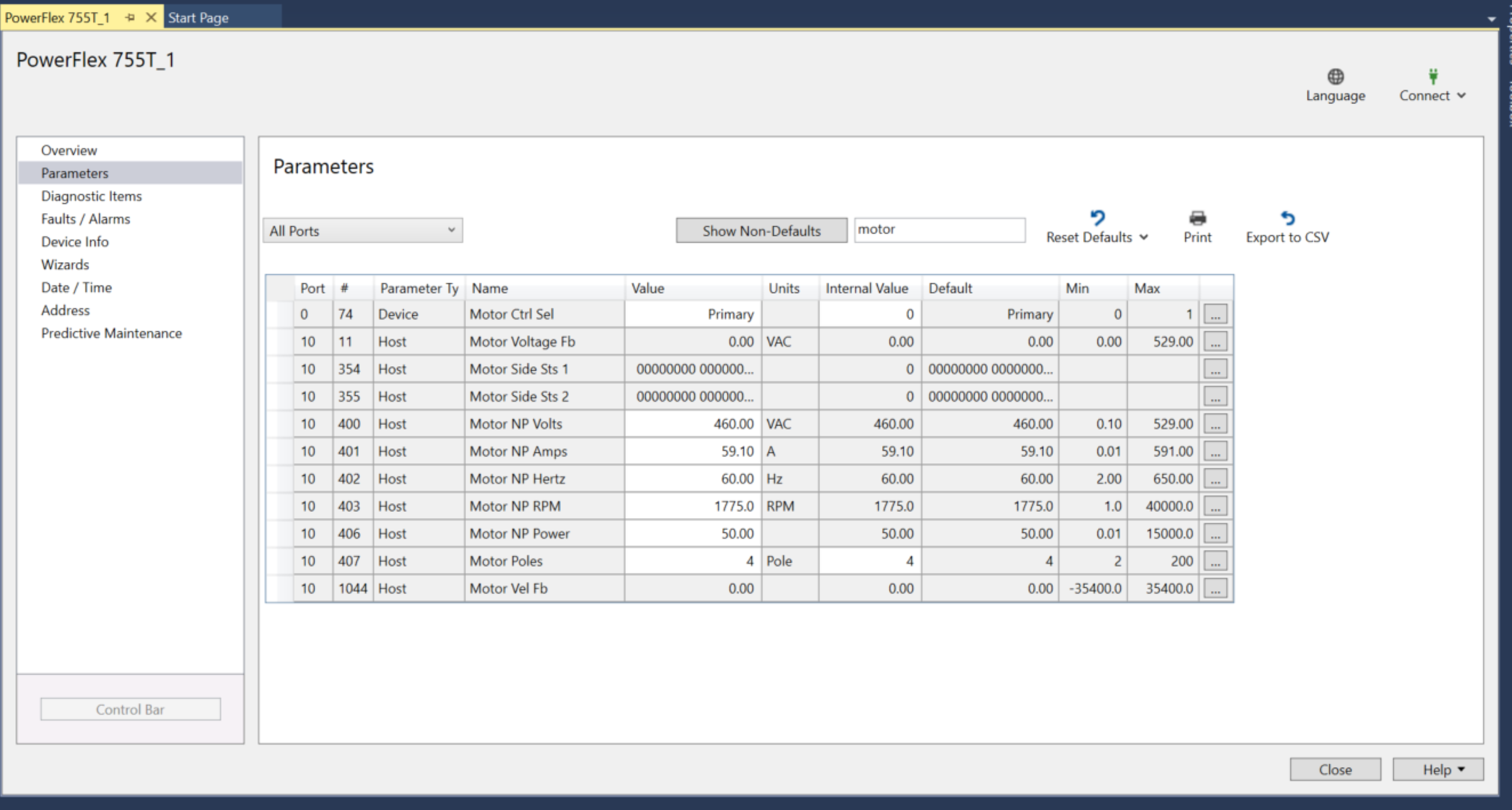
| 0 | 74 | Primary | Ordena al variador que utilice el control del motor primario. | |
| 10 | 400 | 460 | Volts | Datos de placa del motor |
| 10 | 401 | 59 | Amps | |
| 10 | 402 | 60 | HZ | |
| 10 | 403 | 1775 | RPM | |
| 10 | 406 | 50 | HP | |
| 10 | 407 | 4 | Número de polos | |
| 10 | 222 | 74 | Current Limit 1 | Se puede considerar el factor de servicio del motor |
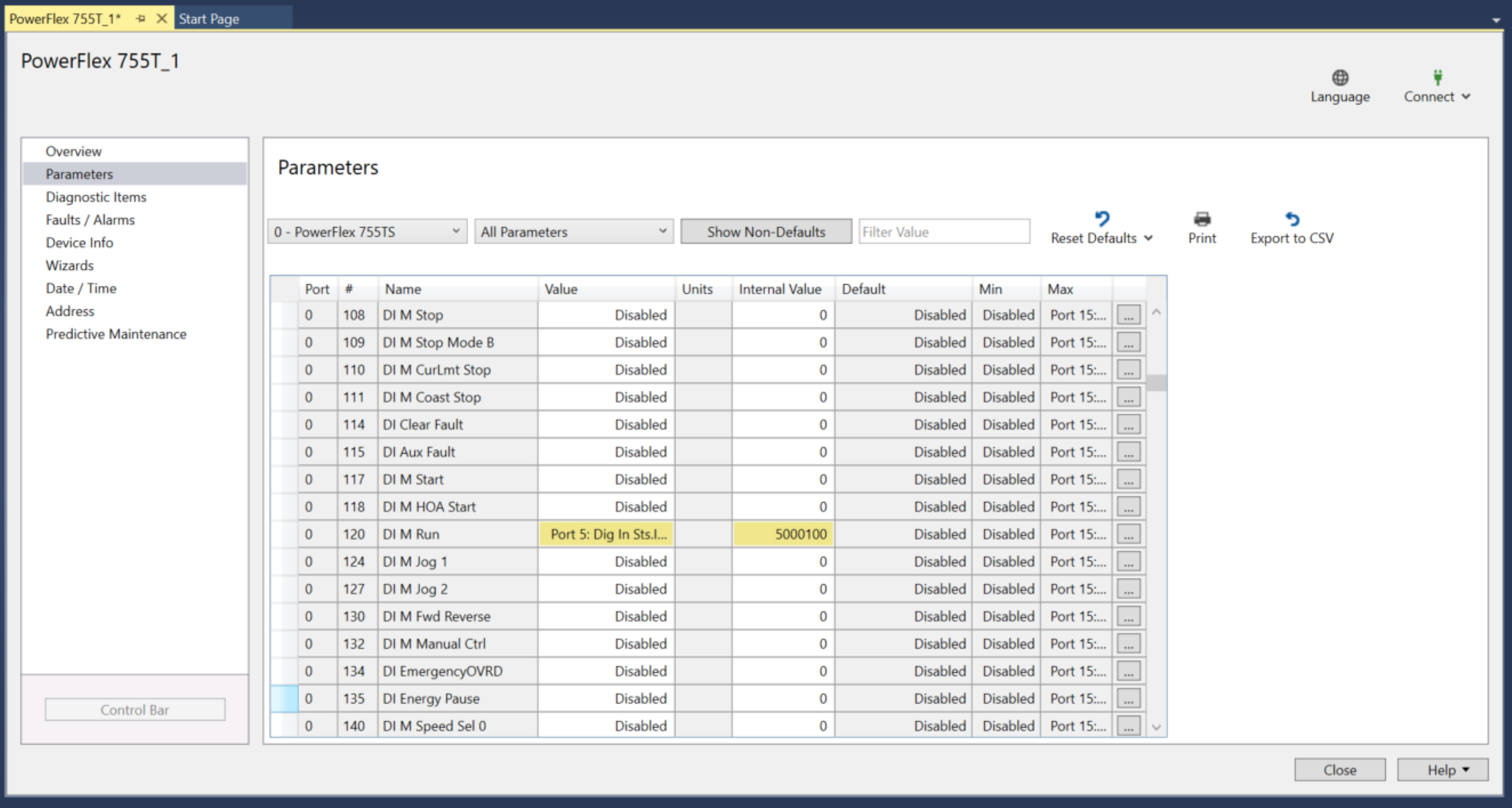
| 0 | 120 | Port 5: Dig In Sts Input 0 | Selecciona una entrada digital utilizada para emitir un comando de marcha al inversor del lado del motor. | De acuerdo a diseño de la solución. Como ejemplo se ha tomado la entrada digital 0 del módulo I/O localizado en el puerto 5. |
| 10 | 110 | Ramp | Modo de Paro | |
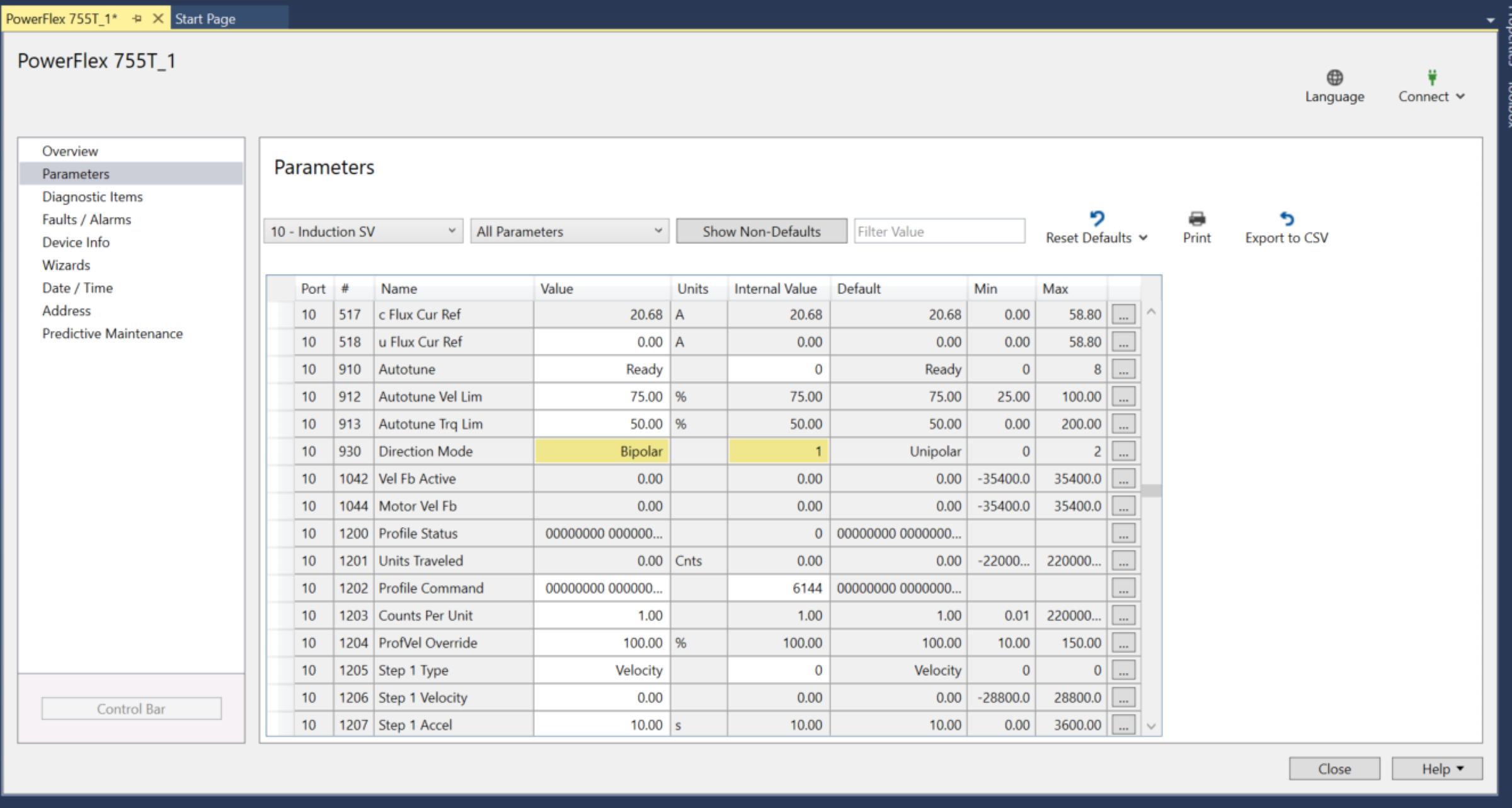
| 10 | 930 | Bipolar | Selecciona un modo donde la referencia de velocidad puede ser negativa y positiva. La rotación inversa se puede obtener utilizando valores negativos. | Permite realizar inversión de Giro |
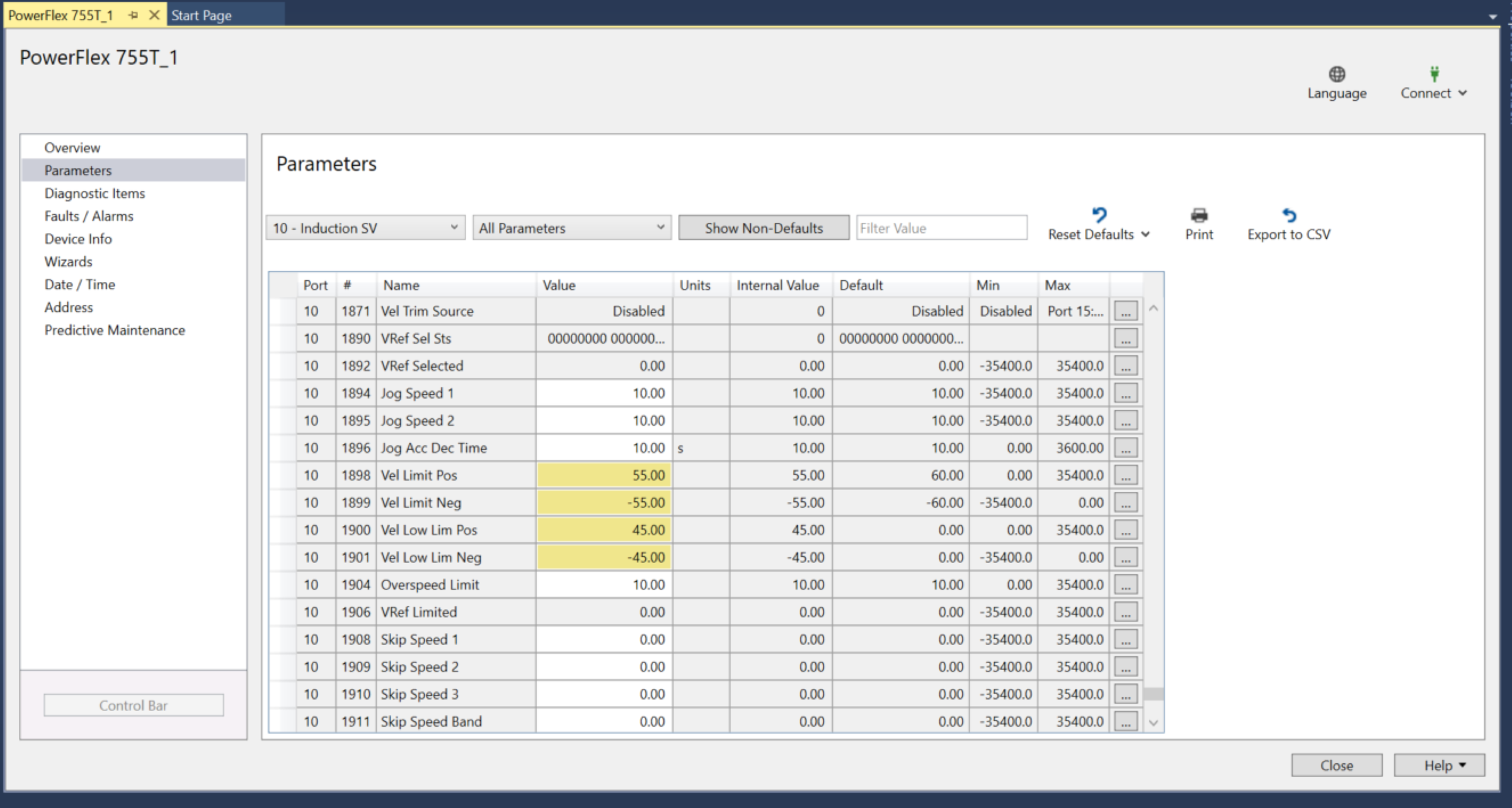
| 10 | 1898 | 55 | Velocidad Máxima Hz | De acuerdo a aplicación. Velocidad máxima basados en presión de la bomba y requerimientos de la red hidráulica. |
| 10 | 1899 | -55 | Velocidad Máxima Hz retroceso | De acuerdo a aplicación. Velocidad máxima basados en presión de la bomba y requerimientos de la red hidráulica. |
| 10 | 1900 | 45 | Velocidad Mínima Hz | De acuerdo a aplicación. Velocidad mínima basados en presión de la bomba, se busca evitar cavitación de la bomba y sobrecalentamiento por funcionar a velocidades bajas. |
| 10 | 1901 | -45 | Velocidad Mínima Hz retroceso | De acuerdo a aplicación. Velocidad mínima basados en presión de la bomba, se busca evitar cavitación de la bomba y sobrecalentamiento por funcionar a velocidades bajas. |
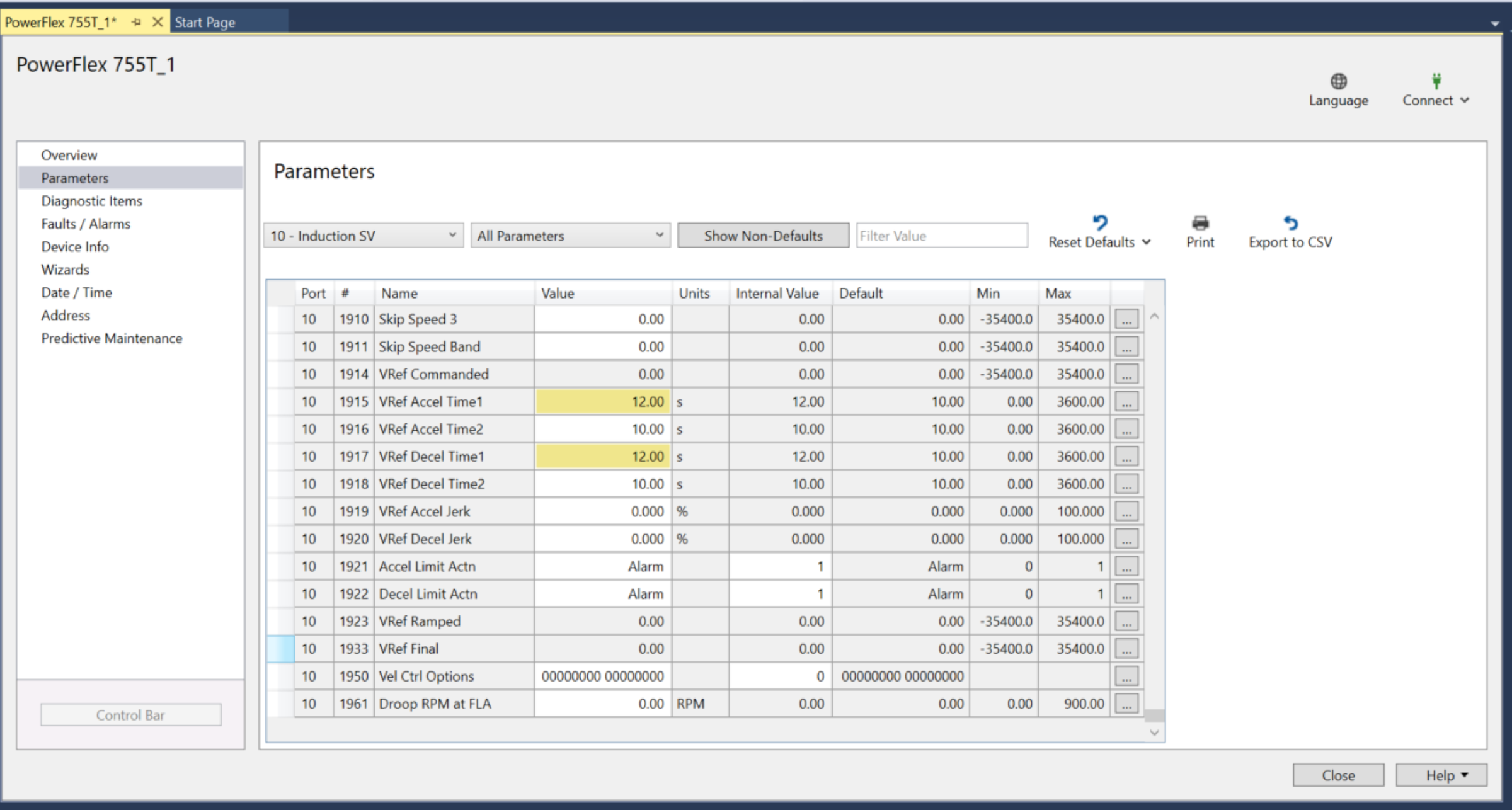
| 10 | 1915 | 12 | Rampa aceleración seg | De acuerdo a aplicación. Basados en la potencia de la bomba se sugiere que la rampa no sea inferior a los 10 segundos. |
| 10 | 1917 | 12 | Rampa desaceleración seg | De acuerdo a aplicación. Basados en la potencia de la bomba se sugiere que la rampa no sea inferior a los 10 segundos. |
Paso 4:
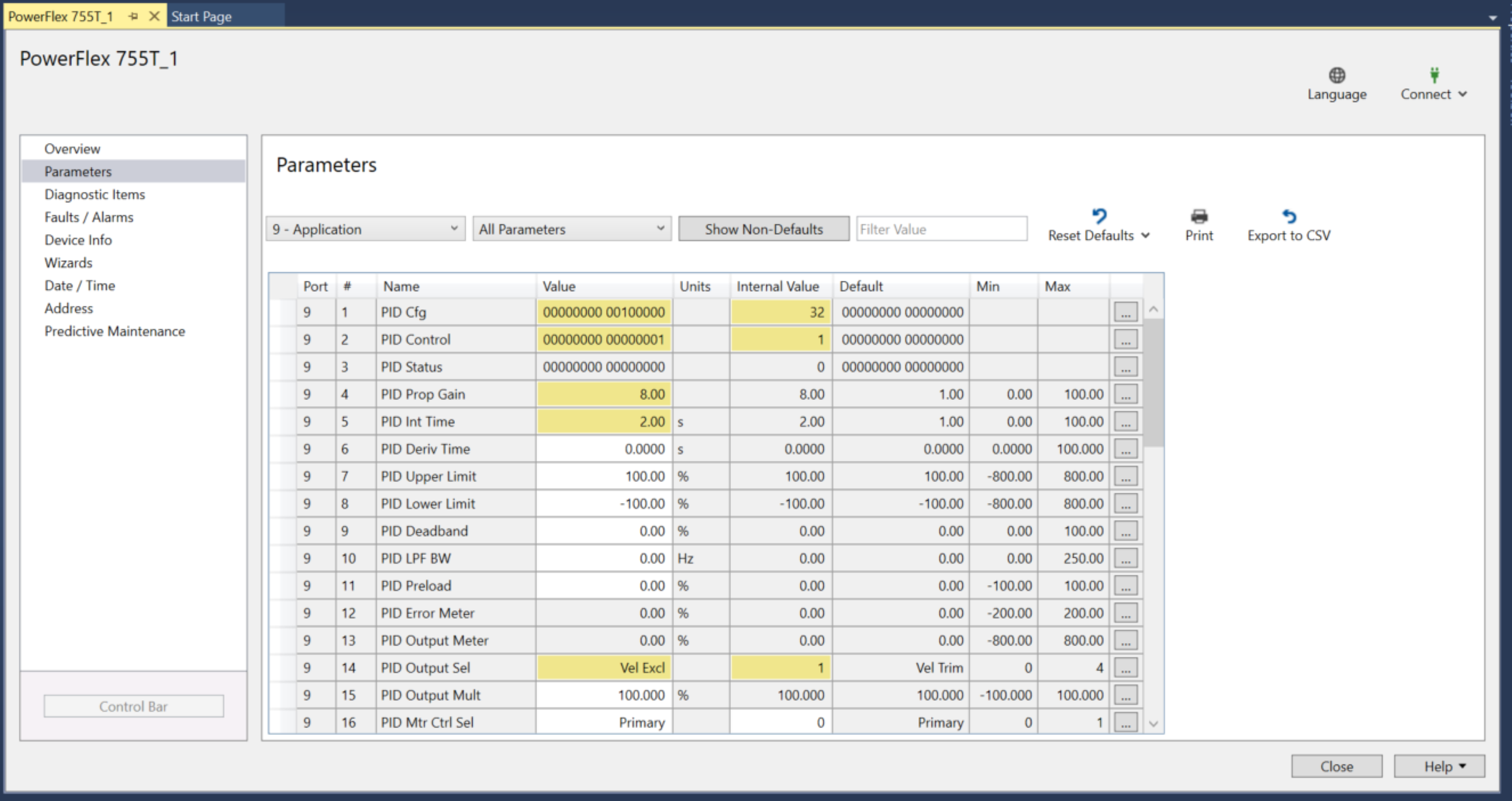
- El siguiente paso consiste en configurar los parámetros asociados al control PID. Primero se habilita el control PID.
- A continuación se configuran los parámetros asociados a la respuesta del control PID.
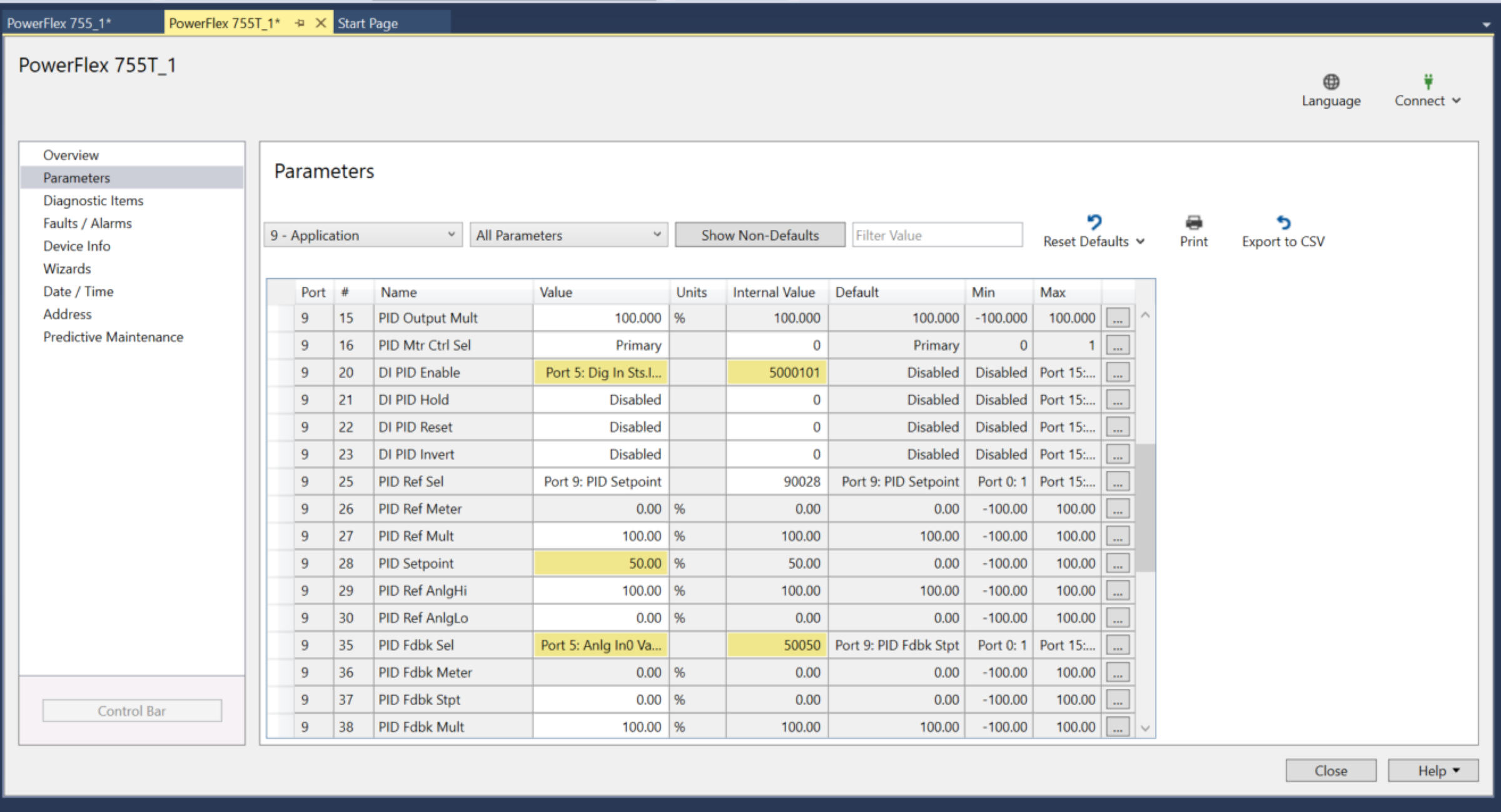
- En seguida se selecciona el set point y la fuente de referencia para el control PID.
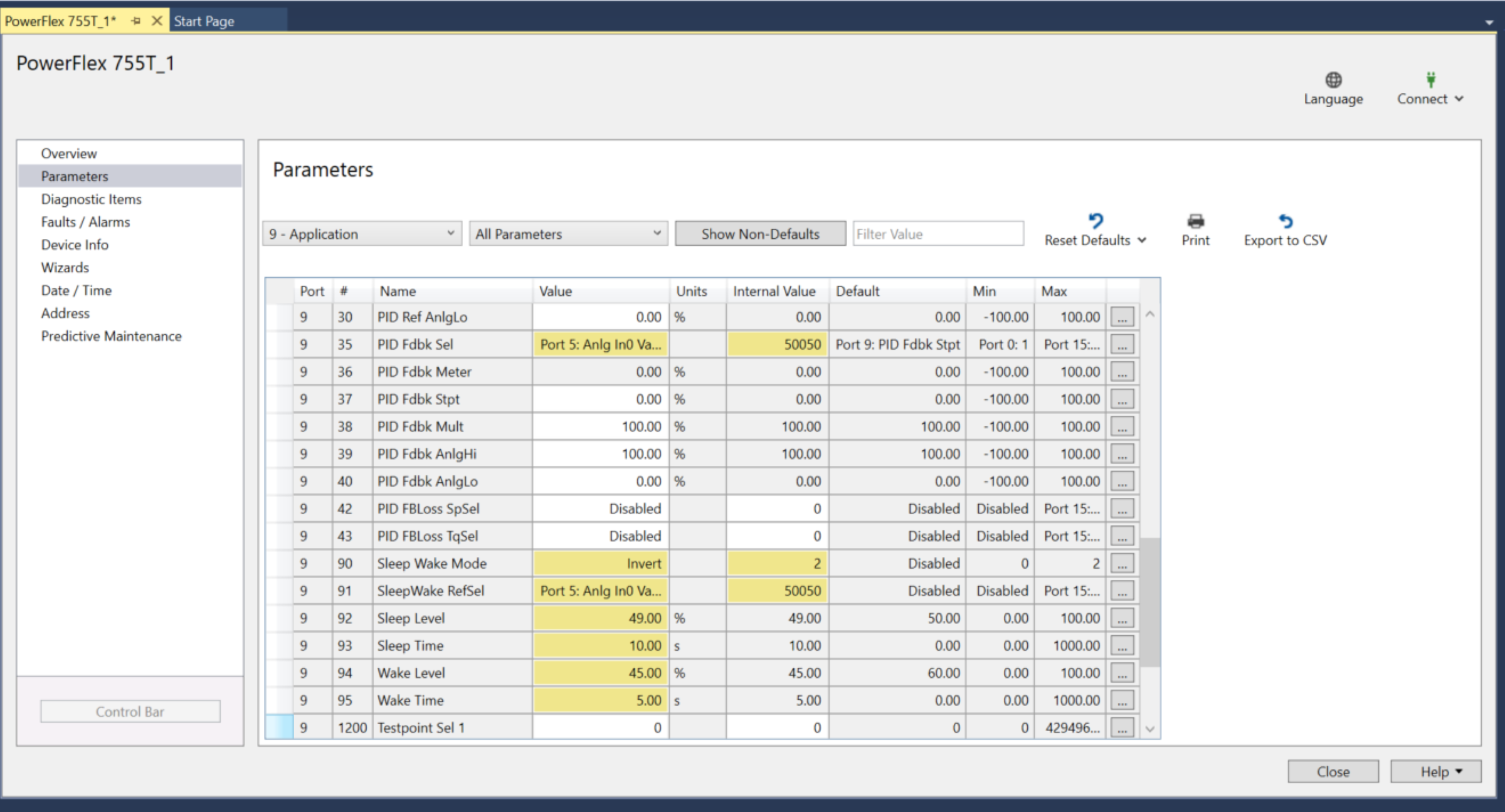
- Finalmente se realiza la configuración de la función dormir y despertar.
Parametrización Paso 4:
| Puerto | Parámetro | Valor | Desripción | Comentarios |
|---|---|---|---|---|
| 9 | 1 | Anti Windup | Cuando este bit está establecido, se evita que el integrador PID produzca un error excesivo que pueda causar inestabilidad del bucle PID. | |
| 9 | 2 | 0 | Habilitación control PID | |
| 9 | 4 | 8 | Constante Proporcional control PID | Ajuste de acuerdo con las características del sistema. Un mayor valor generará incrementos de velocidad en escalones mas grandes. |
| 9 | 5 | 2 | Tiempo Integral control PID | Ajuste de acuerdo a las características del sistema. Un mayor tiempo generará que el escalon tarde más en incrementarse. |
| 9 | 14 | 1 | Vel Excl | La salida PID es la referencia de velocidad. |
| 9 | 25 | Port 9:28 PID Setpoint | PID Ref Sel | Seleccione un parámetro para que sea la fuente de referencia para la función PID |
| 9 | 28 | 50% | Set Point | La presión que le gustaría mantener. Este porcentaje sería relativo al transductor que esté utilizando. Si desea mantener 50 psi y el transductor de presión que está utilizando envía 12 mA al variador, el parámetro 9:28 se establecerá en 50 %. (porque 12 mA es la lectura del 50% de una señal de 4-20 mA). |
| 9 | 35 | Port 5:50 Anlg In0 Value | PID Fdbk Sel | Entrada Análoga que recibe la señal del sensor de presión. |
| 9 | 90 | Invert | Habilita la función de marcha cuando la presión de la red es menor que el nivel de despertar y se detenga cuando la presión de la red es mayor que el nivel de dormir. | |
| 9 | 91 | Port 5:50 Anlg In0 Value | Realimentación de Presión Hidráulica | Determina la entrada análoga por medio de la cual se recibe la realimentación de presión de la red hidráulica. |
| 9 | 92 | 49% | Nivel de dormir | Presión a la cual el variador se tendría que ir a dormir. Bajo consumo de caudal. |
| 9 | 93 | 10 seg | Retardo para habilitar la función dormir. Comienza una vez la presión haya alcanzado el valor configurado en el parámetro 9:92 | |
| 9 | 94 | 45% | Presión a la cual el variador se tendría que ir a despertar. Consumo de caudal. | |
| 9 | 95 | 5 seg | Retardo para habilitar la función Despertar. Comienza una vez la presión haya disminuido hasta el valor configurado en el parámetro 9:94. |