MC_ReadActualPosition (motion control read actual position)
The MC_ReadActualPosition instruction returns the actual position of the feedback axis. MC_ReadActualPosition is only applicable to feedback motion.
Operation details:
- Before executing MC_ReadActualPosition, verify that the axis is in one of the following axis states:
- Disabled
- Standstill
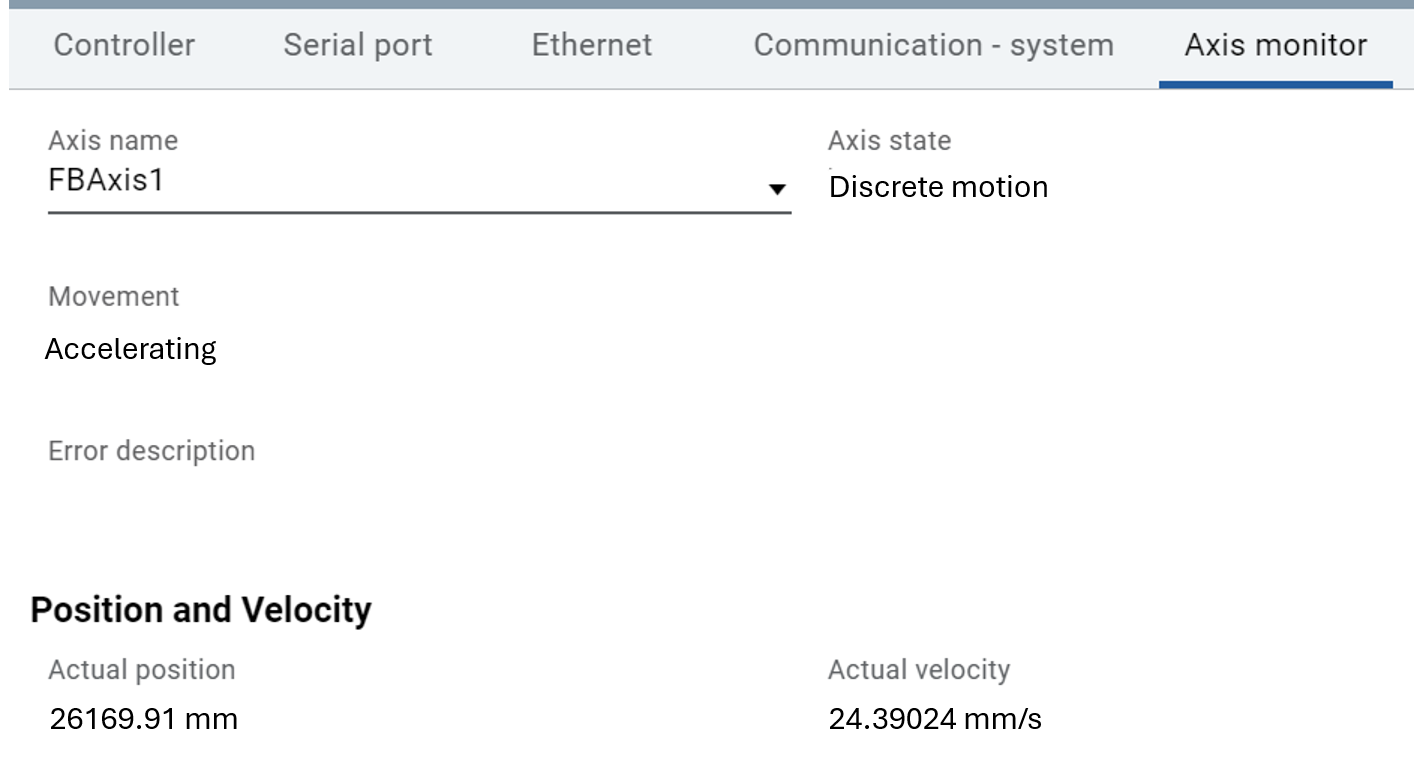
- Discrete Motion
- Error Stop
- The actual position for a feedback axis is not reset to 0 after a download. To reset or clear the position for a feedback axis, use the MC_Home instruction or MC_SetPosition instruction.
Languages supported: Function block diagram, ladder diagram, structured text.
This instruction applies to the L50E and L70E controllers that support motion control.
MC_ReadActualPosition
Parameter | Parameter Type | Data Type | Description |
|---|---|---|---|
AxisIn | Input | FB_AXIS_REF | For an FB_Axis (feedback axis), use the FB_AXIS_REF data type to define AxisIn. |
Enable | Input | BOOL |
|
Axis | Output | FB_AXIS_REF | Axis output is read-only in ladder diagram programs. The axis output parameters are defined in the FB_AXIS_REF data type. |
Valid | Output | BOOL |
|
Busy | Output | BOOL |
|
Error | Output | BOOL | Indicates an error occurred.
|
ErrorID | Output | UNIT | A unique numeric that identifies the error. The errors for this instruction are defined in Motion control function block error IDs . |
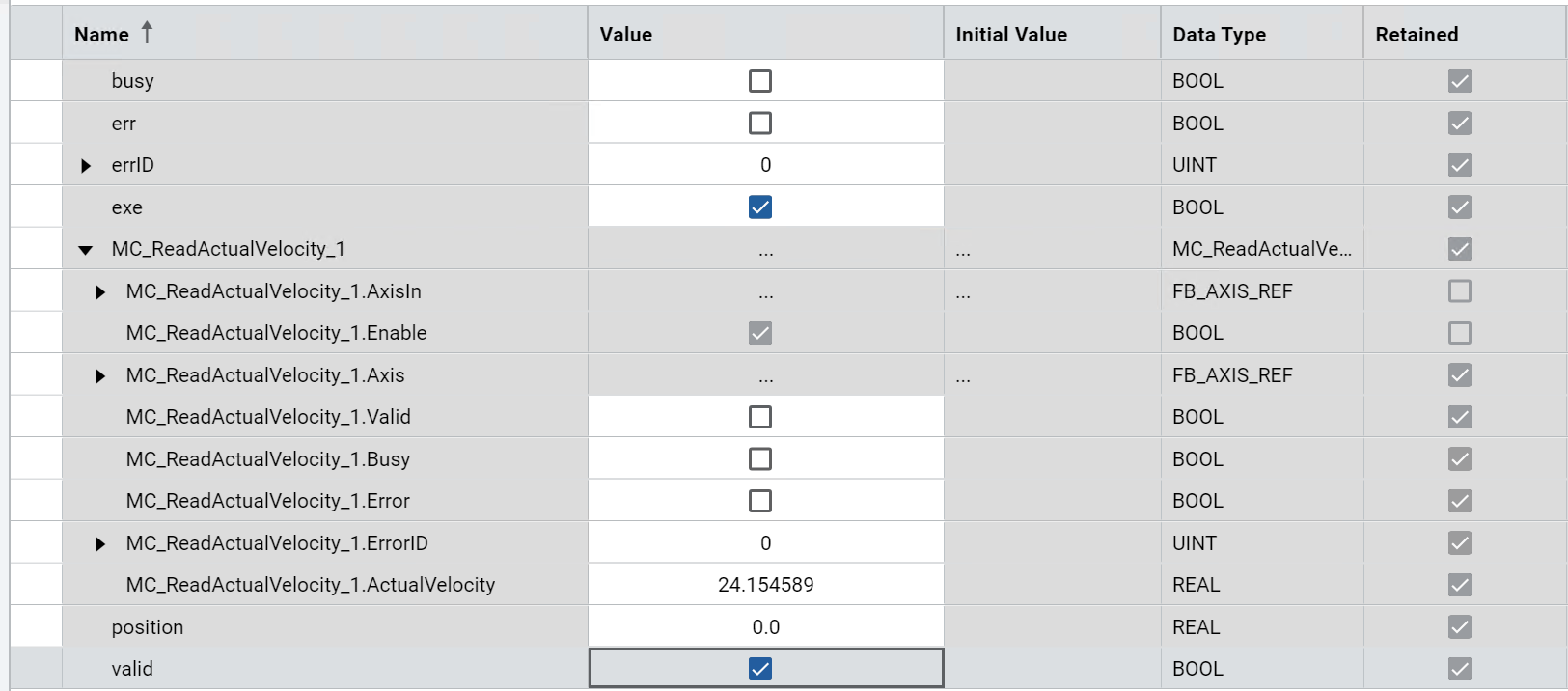
Position | Output | REAL | The value of the actual absolute position for feedback motion axis. (in axis' unit [u]) |
MC_ReadActualPosition examples
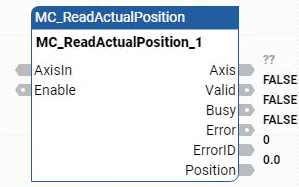
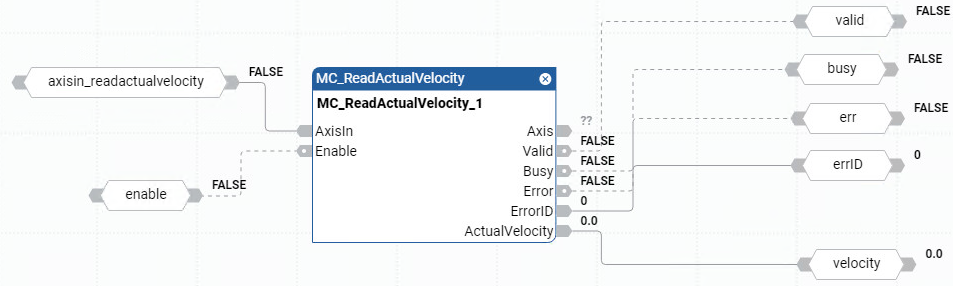
MC_ReadActualPosition function block diagram example
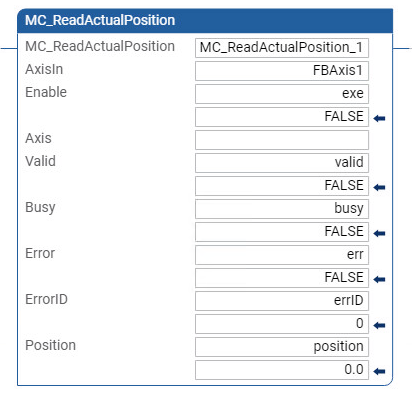
MC_ReadActualPosition ladder diagram example
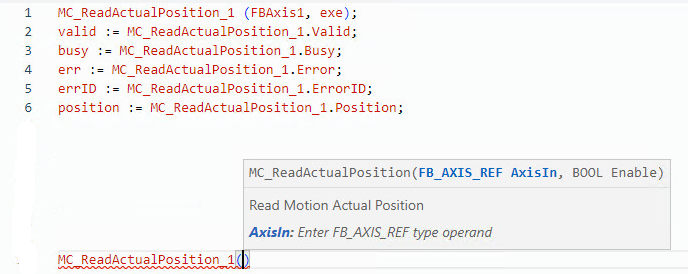
MC_ReadActualPosition structured text example
Results
Provide Feedback