MC_MoveAbsolute (motion control move absolute)
The MC_MoveAbsolute instruction commands a controlled motion to a specified absolute position.
Operation details:
- For theMicro800controller
- The sign of the input Velocity for a MC_MoveAbsolute function block is ignored because the motion direction is determined by the Current position and the Target position.
- The input Direction for a MC_MoveAbsolute function block is ignored because there is only one mathematical solution to reach the Target position.
- If the MC_MoveAbsolute function block is issued when theMicro800controller axis state is Standstill and the relative distance to move is zero, the execution of the function block is immediately reported as Done.
- If a MC_MoveAbsolute function block is issued to an axis that is not in the Homed position, the function block reports an error.
- The MoveAbsolute function block completes with Velocity zero if it is not overridden by another function block.
Languages supported: Function block diagram, ladder diagram, structured text.
This instruction applies to the L50E and L70E controllers that support motion control.
MC_MoveAbsolute
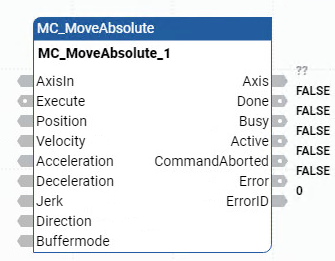
Parameter | Parameter Type | Data Type | Description |
|---|---|---|---|
EN | Input | BOOL | Instruction block enable.
Applies only to ladder diagram programs. |
AxisIn | Input | AXIS_REF | Use the AXIS_REF data type parameters to define AxisIn. |
Execute | Input | BOOL | Indicates when to start motion.
The axis should be in the home position when this execute command is issued or an error occurs, MC_FB_ERR_NOT_HOMED. |
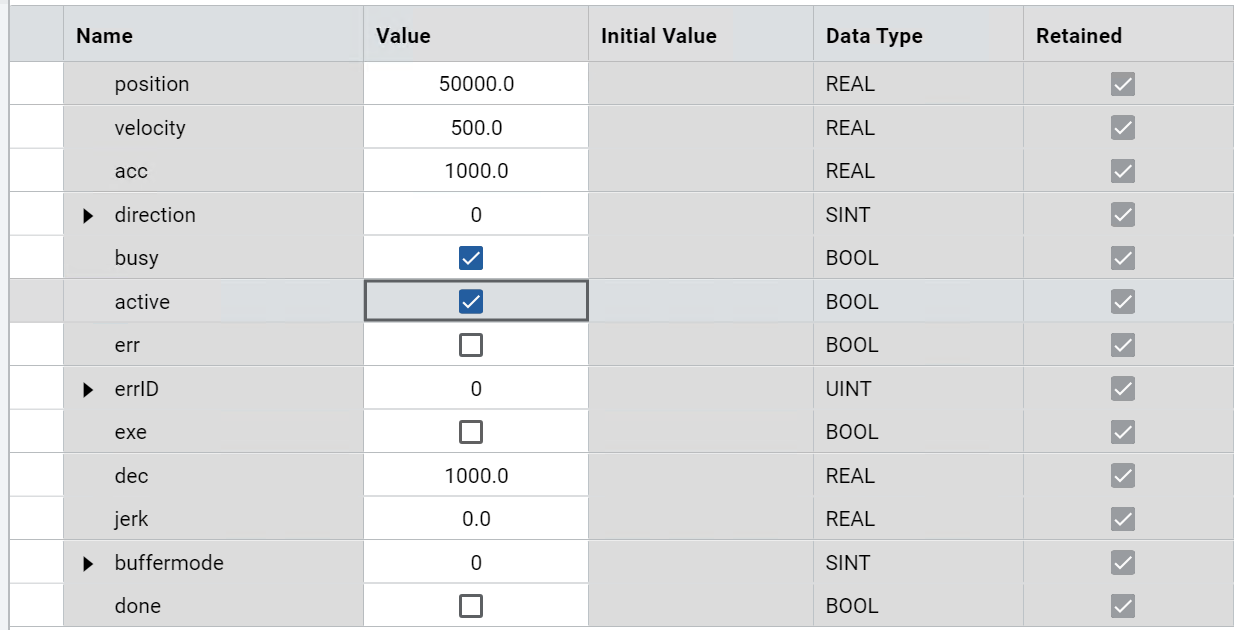
Position | Input | REAL | Target position for the motion in technical unit (negative or positive). The technical unit is defined in the Axis - General tab for an axis. |
Velocity | Input | REAL | Value of the maximum velocity. The maximum velocity might not be reached when Jerk = 0. The sign of Velocity is ignored, the motion direction is determined by the input Position. |
Acceleration | Input | REAL | Value of the acceleration (always positive - increasing energy to the motor.) user unit/sec 2 |
Deceleration | Input | REAL | Value of the deceleration (always positive - decreasing energy to the motor). u/sec 2 |
Jerk | Input | REAL | Value of the Jerk (always positive). u/sec 3 When the value of the input Jerk = 0, the Trapezoid profile is calculated by Motion Engine. When Jerk > 0, the S-Curve profile is calculated. |
Direction | Input | SINT | This parameter is not used. |
BufferMode | Input | SINT | This parameter is not used. |
ENO | Output | BOOL | Enable output. Applies only to ladder diagram programs. |
Done | Output | BOOL | When TRUE, command position reached. When the in-position input is configured as Enabled for this axis, the drive needs to set in-position input signal active before this Done bit goes to True. This action completes with velocity zero unless it is cancelled. |
Busy | Output | BOOL | When TRUE, the function block is not finished. |
Active | Output | BOOL | When TRUE, indicates that the function block has control of the axis |
CommandAborted | Output | BOOL | When TRUE, the Command was overridden by another command, or error stop. |
Error | Output | BOOL | Indicates an error occurred.
|
ErrorID | Output | UINT | A unique numeric that identifies the error. The errors for this instruction are defined in Motion control function block error IDs. |
MC_MoveAbsolute examples
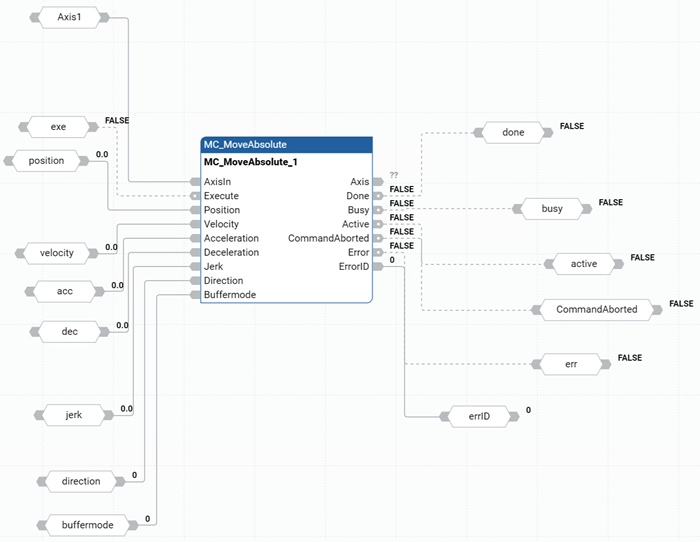
MC_MoveAbsolute function block diagram example
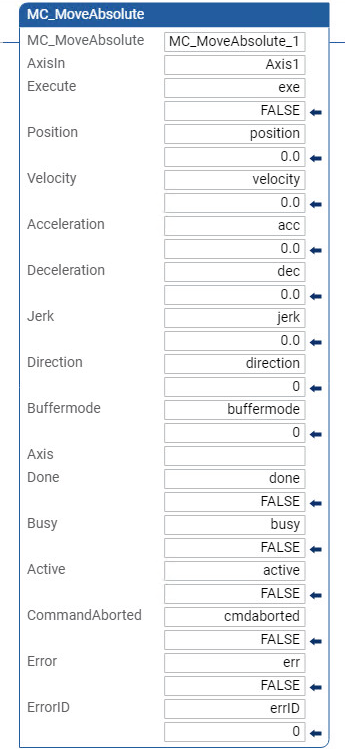
MC_MoveAbsolute ladder diagram example
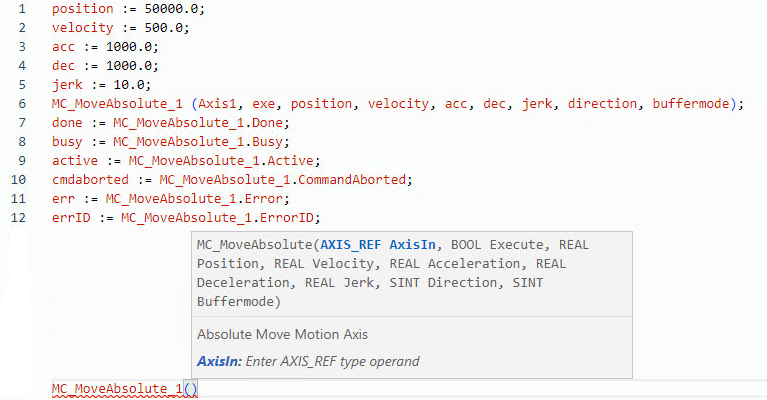
MC_MoveAbsolute structured text example
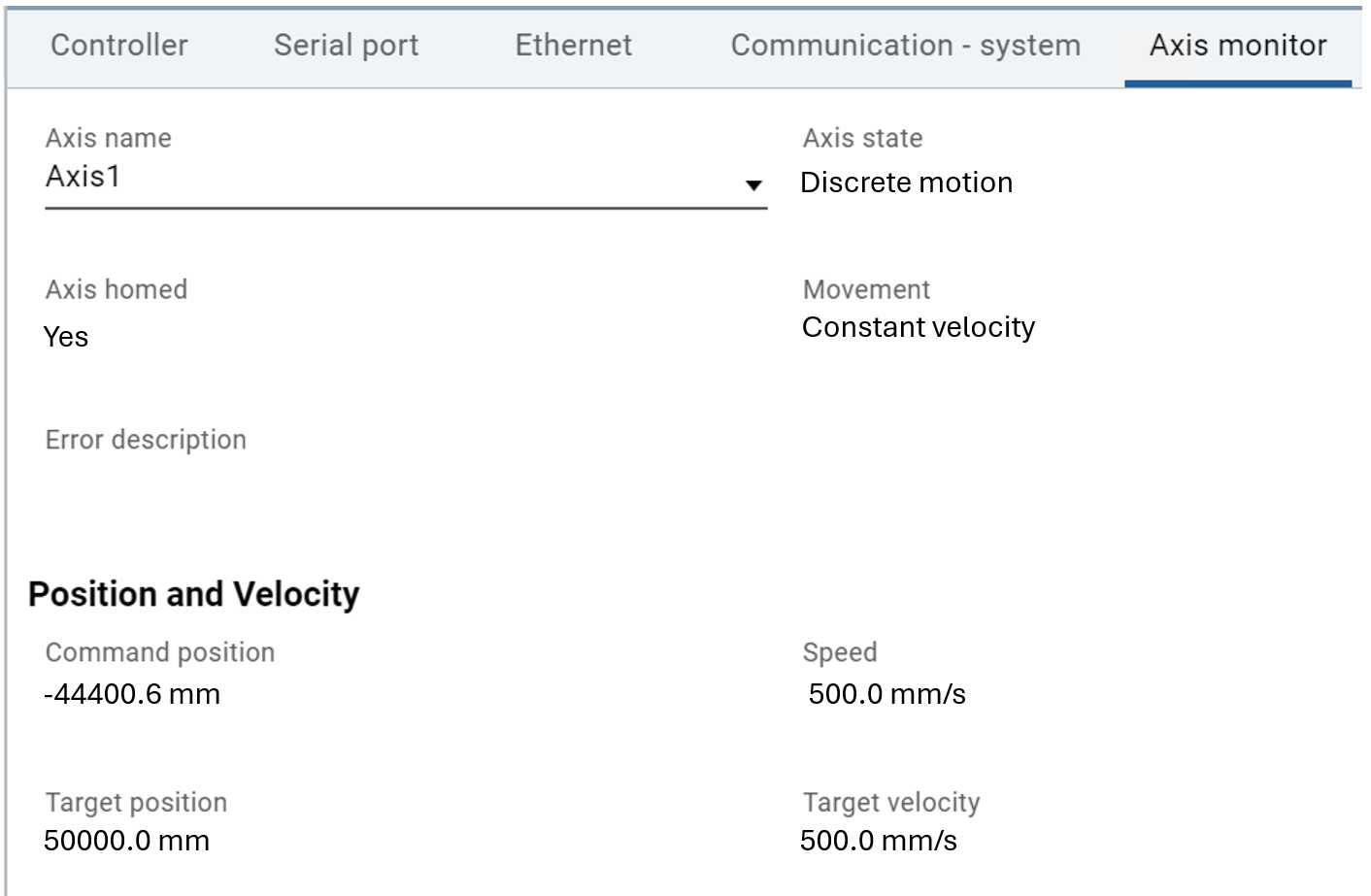
Results
Provide Feedback