Example: How to create an HSC program
This example shows how to create an HSC program that uses a quadrature encoder and includes a Programmable Limit Switch (PLS) function.
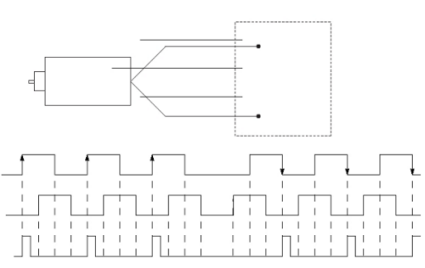
Quadrature encoder used in the example
The HSC program example uses an HSC function block and a quadrature counter with phased inputs A and B. The quadrature encoder determines the direction of rotation and the position for rotating equipment, such as a lathe. The Bidirectional Counter counts the rotation of the quadrature encoder.
The following quadrature encoder is connected to inputs 0 and 1. The count direction is determined by the phase angle between A and B:
- If A leads B, the counter increments.
- If B leads A, the counter decrements.
Quadrature encoder example
Create an HSC program
Perform the following tasks to create, build, and test the HSC program, and then add a PLS function.
Provide Feedback