DERIVATE
Differentiation of a real value over a defined cycle time.
Operation details:
- If the CYCLE parameter value is less than the cycle timing of the execution of the device, the sampling period is forced to this cycle timing.
- The derivation is performed with a time base of milliseconds. For example, the derivation of an input of 1000 that changes to 2000 over a time period of 1 second results in a value of 1. To convert the output of the instruction to units of seconds, multiply the output by 1000.
Languages supported: Function block diagram, ladder diagram, structured text.
This instruction applies to the Micro810, L20E, L50E, and L70E controllers.
DERIVATE
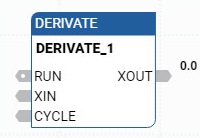
Parameter | Parameter Type | Data Type | Description |
|---|---|---|---|
RUN | Input | BOOL | Indicates the operational mode of the instruction.
|
XIN | Input | REAL | Defines the value on which to perform the derivation calculation. The value must be a REAL value. |
CYCLE | Input | TIME | Defines the sampling time period over which to collect values. Possible time period values range from 0ms through 49d17h2m47s294ms. |
XOUT | Output | REAL | Differentiated output. |
ENO | Output | BOOL | Enable output. Applies only to ladder diagram programs. |
DERIVATE examples
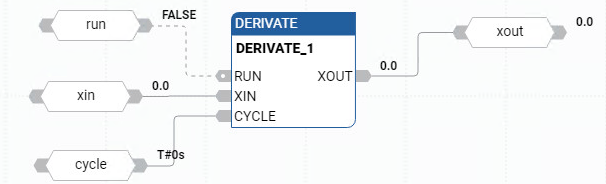
DERIVATE function block diagram example
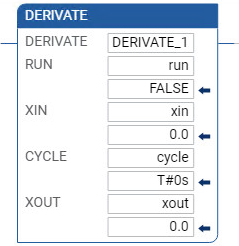
DERIVATE ladder diagram example
DERIVATE structured text example
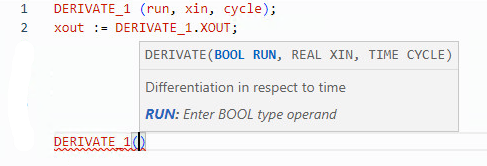
(* ST Equivalence: DERIVATE1 is an instance of a DERIVATE block *) DERIVATE1(manual_mode, sensor_value, t#100ms); derivated_value := DERIVATE1.XOUT;
Provide Feedback